一种基于道路参数的车辆amt换挡方法
技术领域
1.本发明公开了一种车辆amt换挡方法,属于车辆换挡方法技术领域,具体公开了一种基于道路参数的车辆amt换挡方法。
背景技术:
2.随着我国公路建设的高速发展以及人们出行需求的变化,车辆在实现高效快速运输中发挥着重要作用。了解车辆在特定公路区间的行驶特性,研究车辆换挡策略,提高车辆燃油经济性,是车辆工程研究的重要内容。
3.目前最为常用的两参数换挡策略是以车速和节气门开度作为最主要的换挡控制参数来决定挡位切换的时机和操作过程,根据稳态工况下的动力性最优或经济性最优为目标制定换挡规律。这种换挡策略是在平直道路车辆稳态行驶工况下制定的,没有将车辆实际行驶的道路环境纳入考虑范围,而仅仅将车辆在行驶过程中的状态参数作为换挡策略制定因素,而车辆的实际行驶环境复杂多变,不同驾驶习惯的驾驶者对换档规律的要求有着很大差异,在道路环境变化时,采用基本换档模式难以有效保证车辆行驶安全性。
技术实现要素:
4.针对现有技术中存在的技术问题,本发明提供了一种基于道路参数的车辆amt换挡方法,其及绝了上述现有技术中存在的因特定道路线形,汽车行驶安全性不能保证的缺陷,能够实现挡位准确切换,提高了相关部件的使用寿命和车辆的安全性。
5.本发明公开了一种基于道路参数的车辆amt换挡方法,将目标公路区间划分为n个路段,获取每个路段的道路特性参数,获取行驶于目标公路区间内车辆的车辆性能参数,将各个路段对应的道路特性参数和车辆性能参数录入车辆的记忆存储单元;当车辆在目标公路区间内行驶时,判断车辆当前路段为第x路段、车辆即将驶入的路段为第x 1路段,x 1≤n,基于记忆存储单元获取第x路段对应的道路特性参数、车辆性能参数,基于第x路段的道路特性参数、车辆性能参数计算第x路段的第一约束车速,获取第x 1路段对应的道路特性参数、车辆性能参数,基于第x 1路段的道路特性参数、车辆性能参数计算第x 1路段的第二约束车速,取第一约束车速和第二约束车速的较小值作为第x路段和第x 1路段的控制车速;基于控制车速获取新换挡规律图,车辆在第x路段和第x 1路段依据新换挡规律图执行换挡,x、n均为自然数。
6.在本发明的一种优选实施方案中,所述道路特性参数包括桩号、道路线形参数、道路限速值、滚动阻力系数、路面摩擦系数,所述道路线形参数包括经纬度、道路弯道半径、纵向坡度,横向坡度;所述车辆性能参数包括车辆满载质量、车轮半径、车辆轮距、不同档位的传动比、主减速器传动比、空气阻力系数、迎风面积、汽车传动系统的机械效率、汽车质心高度。
7.在本发明的一种优选实施方案中,基于道路线形参数的道路弯道半径r和纵向坡度α,确定每个路段为直线段或曲线段。
8.在本发明的一种优选实施方案中,当车辆在目标公路区间内行驶时,实时采集车辆的位置信息,并判断车辆是否处于正常行驶状态:
9.步骤一,根据车载网络can总线实时获得车辆当前车速,如果当前车速低于行驶阈值,判断车辆未处于行驶状态,停止检索记忆存储单元,直至当前车速大于行驶阈值,进入步骤二;
10.步骤二,实时通过gps获取车辆的当前位置,判断记忆存储单元中是否存储有当前位置对应的道路线形参数,没有则执行步骤一;有则执行步骤三;
11.步骤三,获得当前路段的限速值,实时判断当前车速是否高于限速值,是则发出报警提醒驾驶员限速,否则判断车辆当前位置所处的路段。
12.在本发明的一种优选实施方案中,判断车辆当前位置所处路段的方法如下:
13.步骤一,通过gps获取车辆当前位置,根据车辆的当前位置信息及当前速度信息,判断车辆在目标公路区间的行驶方向;
14.步骤二,通过车辆的当前位置信息、行驶方向判断车辆当前位置为第x路段,车辆即将驶入的路段为第x 1路段。
15.在本发明的一种优选实施方案中,步骤一中,
16.通过gps获取第x路段的起点和终点的经纬度,基于第x路段的起点和终点的经纬度确定车辆的行驶方向,基于车辆的行驶方向确定第x 1路段,实时检测道路弯道半径r和纵向坡度α,确定第x路段和第x 1路段的道路线形。
17.在本发明的一种优选实施方案中,控制车速的获取方法如下:
18.步骤一,通过记忆存储单元获取第x路段和第x 1路段的道路特性参数和车辆性能参数;同时,从车载网络can总线中获得车辆行驶状态参数;道路特性参数、车辆性能参数和车辆行驶状态参数传输至amt换挡控制单元;
19.步骤二,amt换挡控制单元基于接收到的信息确定曲线路段的约束车速、确定直线路段的约束车速;
20.步骤三,取上述两个约束车速中的较小值为第x路段和第x 1路段的控制车速。
21.在本发明的一种优选实施方案中,如果当前路段为平曲线段,约束车速为车辆侧翻的极限速度、车辆侧滑的极限速度、该路段的路段限速值中三者的最小值;
22.如果当前路段是曲线上坡段,约束车速为平曲线段的约束车速、曲线上坡路段的临界车速中两者的较小值;
23.如果当前路段是曲线下坡段,约束车速为该路段的路段限速值。
24.在本发明的一种优选实施方案中,如果当前路段为平直路段,约束车速为该路段的路段限速值;
25.如果当前路段为直线上坡段,约束车速为该路段的路段限速值、直线上坡路段的临界车速中两者的较小值;
26.如果当前路段为直线下坡段,约束车速为该路段的路段限速值。
27.在本发明的一种优选实施方案中,基于控制车速获取新换挡规律图的方法包括,
28.判断控制车速在哪几个档位所在的换挡区间内,当判断控制车速在n和n 1档位的换挡区间内,将当前路段单元的控制车速作为向上换挡极限速度写入n和n 1档位的换挡规律中
29.本发明的有益效果是:本通过基于gps的公路路线测量系统获得道路参数,并通过输入目标公路路段限速值、路面滚动阻力系数、空载时车辆质心高度和轮距,使得车辆在不同道路下行驶时,在车辆行驶前已经获得所行驶公路的道路线形,并将道路参数提交给换档控制单元,在路段起始桩号位置即采用相应道路线形的换挡方法,预测前方路段汽车的运行状态,进行实时调整以应对车辆所处的不同公路情况,使换档控制单元不再单纯地依赖车辆自身的传感器数据来估计当前车辆所在位置的道路情况,保证安全性条件下实现挡位准确切换;具有良好的自适应性,提高了驾驶平顺性,能够使汽车在保证动力性和经济性的同时,实现汽车行驶的安全性。
附图说明
30.图1是本发明一种基于道路参数的车辆amt换挡方法的道路线形的划分示意图;
31.图2是本发明一种基于道路参数的车辆amt换挡方法的各种道路线形路段组合示意图;
32.图3是本发明一种基于道路参数的车辆amt换挡方法的车辆转弯时受力示意图;
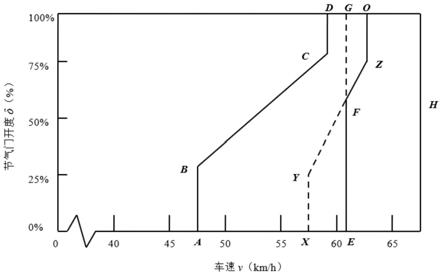
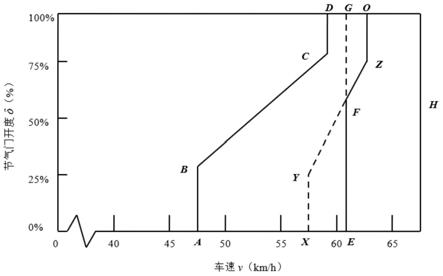
33.图4是现有的车辆amt换挡方法的换挡规律图;
34.图5是本发明一种基于道路参数的车辆amt换挡方法的新换挡规律图。
具体实施方式
35.下面通过附图以及列举本发明的一些可选实施例的方式,对本发明的技术方案(包括优选技术方案)做进一步的详细描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.本发明给出一种基于道路参数的车辆amt换挡方法,包括以下步骤:
37.步骤1:采集目标公路区间的道路参数和限速值,得到目标公路区间道路线形参数,将目标公路区间划分为多个路段;保存每个路段的道路线形参数、道路限速值、滚动阻力系数、路面摩擦系数,确定车辆性能参数。具体包括如下子步骤:
38.步骤11:使车辆空载状态下在目标公路区间往返行驶一次,通过基于gps的公路路线测量系统获得目标公路区间的各路段的道路线形参数,道路线形参数包括经纬度、道路弯道半径、纵向坡度,横向坡度;
39.步骤12:根据道路线形参数将目标公路区间内的路段分为直线段和曲线段;根据道路的曲线半径r和纵向坡度α,将路段类型划分为直线段和曲线段,其中直线段包括:(1)平直线段(半径r>r0,纵向坡度α1<α<α2);(2)直线上坡段(半径r>r0,纵向坡度α≥α2);(3)直线下坡段(半径r>r0,纵向坡度α≤α1);曲线段包括:(1)平曲线段(半径r≤r0,纵向坡度α1<α<α2),(2)曲线上坡段(半径r≤r0,纵向坡度α≥α2),(3)曲线下坡段(半径r≤r0,纵向坡度α≤α1)。其中r0、α1、α2根据不同道路类型进行调整,其划分标准见图1,在一个非限制性实例中,r0为850m;α1为
‑
3%,α2为3.5%,其中坡道为负值代表下坡,坡道为正值代表上坡。如α1为
‑
3%表示坡度为3%的下坡,α2为3.5%表示坡度为3.5%的上坡。例如某段道路半径r=500m,坡度为
‑
5%,根据图2的标准,该路段类型为曲线下坡段;利用桩号对每个路段的起始点进行标记,如图3所示。
40.步骤13:向记忆存储单元(以下简称aum)输入每个路段的道路线形参数和桩号;输入目标公路区间内每个路段的限速值、滚动阻力系数、路面摩擦系数(滚动阻力系数、路面摩擦系数根据路面状况选取,如表1和表2)。输入车辆性能参数(车辆满载质量、车轮半径、车辆轮距、不同档位的传动比、主减速器传动比、空气阻力系数、迎风面积、汽车传动系统的机械效率、汽车质心高度,这些参数可由汽车厂家获取)。
41.步骤2:在车辆行驶在目标公路区间的过程中,实时采集车辆的位置信息,并判断车辆是否处于正常行驶状态,是则进入步骤3。具体包括如下子步骤:
42.步骤21:根据车载网络can总线实时获得车辆当前车速,如果当前车速低于行驶阈值(在一个非限制性实例中行驶阈值设定为5km/h),判断车辆未处于行驶状态,停止检索aum,直至当前车速大于行驶阈值,进入步骤22;
43.步骤22:实时通过gps获取车辆的当前位置,判断aum中是否存储有当前位置对应的道路线形参数,没有则执行步骤1;有则执行步骤23;
44.步骤23:获得当前路段的限速值,实时判断当前车速是否高于限速值,是则发出报警提醒驾驶员限速;否则执行步骤3。
45.步骤3:通过gps获取车辆当前位置,根据车辆的位置信息及速度信息,判断车辆在目标道路的行驶方向,具体方法如下:
46.步骤31:参见图2,根据车辆的当前位置后确定汽车的当前路段(例如k3—k4路段),通过gps测得当前路段起点k3和终点k4的经纬度,计算车辆的当前位置距离当前路段起终点k3和k4的距离s3和s4;再次计算1秒以后下一时刻,车辆的当前位置距离k3和k4的距离s3’和s4’;若s3>s3’,则认为车辆的行驶方向为k3—k4方向,如果s3<s3’,则认为车辆的行驶方向为k4—k3方向;
47.步骤32:通过车辆的行驶方向判断当前路段和车辆的前方路段的道路线形具体方法如下:
48.实时检测道路弯道半径r和纵向坡度α,确定当前路段的道路线形;
49.然后根据车辆的行驶方向,确定车辆的前方路段的道路线形。
50.例如,汽车在k3—k4段,行驶方向为k3—k4时,此时k3—k4段的道路弯道半径r=500m和坡道α=5%,满足图1中曲线上坡路段的标准;假如汽车在k3—k4段,行驶方向为k4—k3,由于坡道方向发生变化,此时k4—k3段的道路弯道半径r=500m和坡道α=
‑
5%,满足曲线下坡路段的标准。
51.步骤33:通过aum获得当前路段和前方路段的道路线形参数和车辆性能参数(步骤1中所存储的参数);同时,从车载网络can总线中获得车辆行驶状态参数(包括车速、发动机转速、节气门开度和变速器档位);将道路线形参数、车辆性能参数和车辆行驶状态参数传输至amt换挡控制单元;
52.步骤4:amt换挡控制单元对接收到的信息实时处理,将当前路段和前方路段作为一个路段单元进行考虑,确定车辆在当前路段单元的约束车速;具体包括如下步骤:
53.步骤41:确定曲线路段(包括平曲路段、曲线上坡路段和曲线下坡路段)的约束车速;具体步骤如下:
54.(1)如果当前曲线路段为平曲线段,确定汽车在弯道上的约束车速,具体如下:
55.汽车在曲线路段上发生侧翻的极限速度为v
r
,如图3,汽车不发生侧翻应满足方程
式(1)
[0056][0057]
由公式(1)可得,汽车发生侧翻的极限速度为:
[0058][0059]
汽车在曲线路段上发生侧滑的极限速度为v
s
,如图3,汽车不发生侧滑需满足方程式(3)
[0060][0061]
由公式(3)可得,汽车发生侧滑的极限速度为:
[0062][0063]
公式(1)
‑
(4)中:m为车辆满载质量,kg;v为车速,m/s;β为横向坡度,
°
;r为道路弯道半径,m;h为重心高度,m;b为车辆轮距,m;μ为路面的摩擦系数,根据路面状况从表1中获取。
[0064]
在aum中检索到路段限速值v
l
,利用公式5得到汽车在弯道上的约束车速vm1:
[0065]
v
m1
=min{v
r
,v
s
,v
l
}
ꢀꢀꢀ
(5);
[0066]
(2)如果当前曲线路段是曲线上坡段,计算车辆在曲线上坡路段的约束车速,具体如下:
[0067]
假设汽车在爬坡瞬态是匀速状态,其力学平衡方程如下:
[0068]
f
i
=f
t
‑
(f
f
f
w
)
ꢀꢀꢀ
(6)
[0069]
式中,f
t
为汽车驱动力,f
f
为滚动阻力,f
w
为空气阻力,f
i
为坡度阻力。
[0070][0071][0072]
发动机转矩t
tq
看成发动机转速n的函数,其多项式可表示为:
[0073]
t
tq
=a0 a1n a2n2 l a5n5ꢀꢀꢀ
(9)
[0074]
式中:tt
q
为发动机转矩;n
·
m;n为发动机转速,r/min;系数a0,a1,a2,...,a5可通过实验数据,由最小二乘法拟合获得。
[0075]
利用公式10,计算能够通过该上坡路段的临界车速v
a
:
[0076]
[0077]
公式(7)
‑
(10)中,m为车辆满载质量,kg;t
tq
是发动机转矩,n
·
m;i
g
为汽车所在档位的传动比;i
m
为主减速器传动比;η
t
为汽车传动系统的机械效率;r为车轮半径,m;f为滚动阻力系数,根据路面状况从表2中选取;α为纵向坡度,
°
;cd为空气阻力系数;a为迎风面积,m2;v为车速,m/s;n为发动机转速,r/min。
[0078]
利用公式11,得到汽车在弯道上坡路段的约束车速v
m2
:
[0079]
v
m2
=min{v
m1
,v
α
}
ꢀꢀꢀ
(11);
[0080]
(3)如果曲线路段是曲线下坡段,在aum中检索到路段限速值v
l
,将v
m3
=v
l
作为汽车在曲线下坡路段的约束车速。
[0081]
步骤42:确定直线路段(包括平直路段、直线上坡路段和直线下坡路段)的约束车速;具体步骤如下:
[0082]
(1)如果直线路段是平直路段,在aum中检索到当前路段限速值v
l
,v
m4
=v
l
作为汽车在平直路段的约束车速。
[0083]
(2)如果直线路段是直线上坡段,首先利用公式10计算能够通过该上坡路段的临界车速v
α
,然后在aum中检索到路段限速值v
l
,利用公式12得到直线上坡段的约束车速v
m5
:
[0084]
v
m5
=min{v
l
,v
α
}
ꢀꢀꢀ
(12);
[0085]
(3)如果直线路段是直线下坡路段,在aum中检索到路段限速值v
l
,将v
m6
=v
l
作为汽车在直线下坡段的约束车速。
[0086]
步骤43:通过步骤41和步骤42,分别得到当前路段和前方路段的约束车速,然后将当前路段和前方路段作为一个路段单元,取它们的约束车速中的较小值作为当前路段单元的控制车速。
[0087]
步骤5:本发明的方法的设计思路是在常规的换挡规律上增加一个向上换挡极限,以保证车辆当前路段和前方路段的安全性和动力性。
[0088]
图4为n和n 1档位的换挡规律图,包括向下换挡线a
‑
b
‑
c
‑
d(n 1档降n档)和向上换挡线x
‑
y
‑
z
‑
o(n档升n 1档),对于运行在由向下换挡线a
‑
b
‑
c
‑
d(n 1档降n档)和向上换挡线x
‑
y
‑
z
‑
o(n档升n 1档)所确定的空间内,就不需要换挡,对于运行在向下换挡线a
‑
b
‑
c
‑
d(n 1档降n档)上或其左边区域,要求换到下一低档位,对于运行在向上换挡线x
‑
y
‑
z
‑
o(n档升n 1档)上或其右边区域,要求换到下一高档位,
[0089]
根据当前路段和前方路段的道路类型以及道路线形,利用步骤41和步骤42分别计算当前路段和前方路段的约束车速,取两者的最小值作为当前路段单元的控制车速,判断控制车速在哪几个档位所在的换挡区间内,如果判断控制车速在n和n 1档位的换挡区间内,将当前路段单元的控制车速作为向上换挡极限速度写入n和n 1档位的换挡规律中,如图5中e
‑
f
‑
g线,f点为向上换挡线x
‑
y
‑
z
‑
o与向上换挡极限速度e
‑
f
‑
g线的交点,汽车在图中所示档位(n和n 1档)的最大车速大于当前路段单元的控制车速,此时将当前路段单元的控制车速作为向上换挡极限速度写入该档位的换挡策略中,如果汽车的节气门开度和汽车车速在向上换挡线x
‑
y
‑
f上或其右边区域时,不采取升档措施,降低因高档位传动比小,车辆速度增加太快,超过控制车速;如果车速超过控制车速,需在仪表显示“您已超过安全车速,请减速慢行”或者车内播放音频“您已超过安全车速,请减速慢行”。即向上换挡曲线线更改为e
‑
f
‑
z
‑
o,如图5。如果汽车在某一档位的最大车速(该档位图中未标出)小于当前路段单元的控制车速,则按原有经济换挡规律或者性能换挡规律换挡进行换挡。
[0090]
以上公式中所需参数获取方式如下:
[0091]
车速v、纵向加速度a、发动机转速n和变速器档位均为车辆行驶过程中从车载网络can总线中获得;道路限速值v
l
、纵向坡度角α,横向坡度角β、道路弯道半径r从aum中获得;车辆满载质量m、车轮半径r、车辆轮距b、不同档位的传动比i
g
、主减速器传动比i
m
、空气阻力系数c
d
、迎风面积a、汽车传动系统的机械效率η
t
、汽车质心高度h根据汽车厂家获取。路面的摩擦系数和滚动阻力系数都存于aum中,分别见表1和表2,需要使用时从车辆的记忆存储单元aum中调用。
[0092]
在本发明中,考虑到道路线形对行车安全的影响,引入当前路段单元的控制车速,在amt的换挡策略中,判断控制车速处于哪几个档位区间,将其作为向上换挡的极限速度,即车速超过控制车速后不再升档,提高了车辆行驶的安全性。
[0093]
虽然以上已经披露了结合本发明的这些原理的多个示例性实施例,但是本发明不仅限于所披露的实施例。而且,本技术旨在覆盖本发明的使用了其一般原理的任何变体、用途或适配。此外,本技术旨在覆盖相对于本披露的此类偏离内容,就如同位于本发明所属领域的已知或惯用实践中,并且落入所附权利要求的界限之内。
[0094]
路面摩擦系数沥青或混凝土(干)0.8
‑
0.9沥青(湿)0.5
‑
0.7混凝土(湿)0.8砾石0.6土路(干)0.68土路(湿)0.55雪(压紧)0.2冰0.1
[0095]
表1路面的摩擦系数的取值
[0096][0097]
表2滚动阻力系数f的数值
[0098]
人员容易理解,以上仅为本发明的较佳实施例而已,并不以限制本发明,凡在本发明的精神和原则下所做的任何修改、组合、替换、改进等均包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。