1.本发明涉及一种医用电生理导管,特别是一种多电极臂消融导管。
背景技术:
2.心房颤动是常见的持续性心律失常,严重危害人类的健康和影响生活质量。肺静脉之所以成为心房颤动最常见的局部病灶是因为肺静脉肌袖的存在,肺静脉肌袖是与心房肌细胞同源的由左心房伸入到肺静脉的心肌组织。肺静脉的内膜和外膜之间有心肌细胞集落,由心房侧向肺侧呈袖状包绕肺静脉,称为心肌袖,由于形成心肌袖的细胞与心房肌的起源不同,电生理特也不同,因此会形成异常激动的基质。肺静脉周围的心房肌与肺静脉同样,也包含有af(房颤)的触发灶或者维持af的心律失常基质,因此在消融隔离时肺静脉周围的心肌组织有时也会被消融。目前常用的方式为逐点式点消融肺静脉前庭以形成环形隔离带,该方式手术时间长,给患者及医生带了巨大压力,且经常存在漏点而导致复发,因此亟需设计出一种能一次性快速消融隔离肺静脉前庭的导管电极。
3.目前已知的环形电极导管,为便于通过鞘管,远端设置为自由端,在消融时自由端无法保证和腔道结构能很好的贴靠,需要医生不断的旋转调整导管位置以使电极和组织形成良好的贴靠,从而增加了手术时间。目前已知的多极消融导管无法在一次消融时就形成一个环,需要旋转多次进行消融隔离,影响消融效率。
技术实现要素:
4.本发明的目的在于:针对现有技术存在的问题,提供一种多电极臂消融导管。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种多电极臂消融导管,包括多臂头端和牵引机构,所述多臂头端由2-6个电极臂组成,所述电极臂远端收纳于防损伤头端,所述电极臂收纳于近端管体,所述牵引机构连接所述防损伤头端和所述近端管体,所述牵引构件用于牵引所述电极臂;
7.当所述牵引构件未对所述电极臂进行牵引时,单个所述电极臂为螺旋上升的s形结构;
8.当所述牵引构件牵引所述电极臂向所述防损伤头端移动时,所有所述电极臂拉伸形成线形结构;
9.当所述牵引构件牵引所述电极臂向所述近端管体移动时,所有所述电极臂回缩组成一个圆环,所述圆环垂直于所述牵引构件轴线。
10.本发明的单个电极臂在自然状态下(牵引构件未进行牵引时)呈螺旋上升形态,螺旋s形,初始螺旋s形有利于在初始时将电极臂拉伸呈线性放入鞘管内部,然后进入心脏内部,而在牵引构件的作用下,当牵引构件向近端管体移动时,多臂头端上的电极臂变成圆环形平面状态,更加利于圆形腔道结构的封堵与贴靠,以及对环形消融区域的全部覆盖,提升消融的可靠性。而将圆环垂直于牵引构件轴线设置,有利于更加精确计算导管整体形态,提高消融的准确性。
11.作为本发明的优选方案,当所述牵引构件向所述近端管体移动时,所述电极臂的电极沿所述圆环的周向均匀分布,以利于均匀的环形消融,避免漏点的发生。
12.作为本发明的优选方案,所述电极臂内部设有支撑构件,所述支撑构件的形态决定所述电极臂的形态,支撑构件远端和支撑构件近端均逐步贴近所述牵引构件)轴线,以利于电极臂能进行各种形态变化,能顺利切换线形和圆环形状态。
13.作为本发明的优选方案,所述支撑构件为记忆合金构件,如镍钛合金(niti)等,能在去除外界力后恢复至初始形态。
14.作为本发明的优选方案,所述电极臂的数量为三个,且沿垂直于所述牵引构件轴线方向呈120度均匀分布。
15.作为本发明的优选方案,每个电极臂设有螺旋臂定位传感器,所述螺旋臂定位传感器沿所述牵引构件)轴线方向均匀分布。
16.作为本发明的优选方案,所述防损伤头端设有头端定位传感器,所述近端管体设有近端定位传感器,所述头端定位传感器和所述近端定位传感器形成的中心线与所述螺旋臂定位传感器形成的平面垂直,如此设计便于系统更加精确计算导管整体形态。
17.作为本发明的优选方案,所述电极臂为聚氨酯构件,具备高弹性。
18.作为本发明的优选方案,在垂直牵引构件轴向俯视图下多个所述电极臂呈花瓣状态分布,有利于对腔道结构的整体覆盖。
19.作为本发明的优选方案,所述牵引构件内部设置有导丝通道,所述导丝通道头端开放并固定在所述防损伤头端,导丝能够在所述导丝通道内穿行。
20.综上所述,由于采用了上述技术方案,本发明的有益效果是:
21.1、本发明采用多个螺旋形的电极臂,保证了电极组织的有效贴靠。
22.2、本发明的电极臂具有形态可调节性,初始螺旋s形有利于在初始时将电极臂拉伸呈线性放入鞘管内部,然后进入心脏内部并稳定。
23.3、本发明的电极臂能够形成完整的环形消融区域,提高消融效率。
24.4、本发明的电极臂回缩时形成的圆环垂直于牵引构件轴线设置,有利于更加精确计算导管整体形态,提高消融的准确性。
附图说明
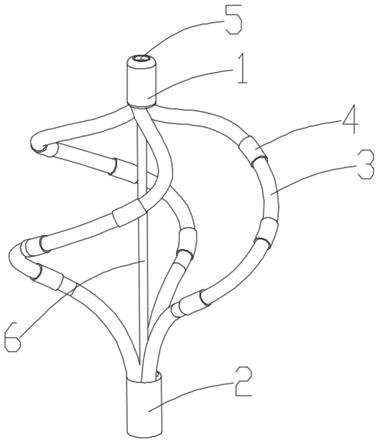
25.图1是导管头端自然状态示意图一。
26.图2是导管头端自然状态示意图二。
27.图3是导管头端定位传感器分布示意图一。
28.图4是导管头端定位传感器分布示意图二。
29.图5是导管头端定位传感器分布示意图三。
30.图6是导管头端收缩后整体示意图一。
31.图7是导管头端收缩后整体示意图二。
32.图8是导管头端收缩后整体示意图三。
33.图9是导管头端增加导丝后整体示意图。
34.图10是多臂头端与腔道组织贴靠示意图一。
35.图11是多臂头端与腔道组织贴靠示意图二。
36.图12是导管到达肺静脉口部示意图。
37.图13是导管在肺静脉口部消融示意图。
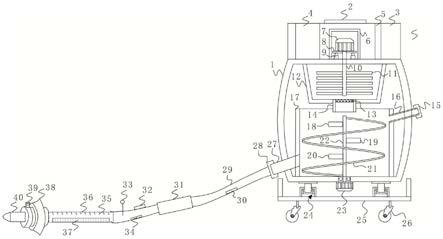
38.图14是导管整体示意图。
39.图标:1.防损伤头端;2.近端管体;3.电极臂;31.支撑构件;32.支撑构件远端;33.支撑构件电极布置区域;34.支撑构件近端;4.电极;5.导丝通道;6.牵引构件;7.多臂头端;71.头端定位传感器;72.近端定位传感器;73.螺旋臂定位传感器a;74.螺旋臂定位传感器b;75.螺旋臂定位传感器c;8.导丝;9.腔道组织;10.肺静脉;11.鞘管;12.标测导管。
具体实施方式
40.下面结合附图,对本发明作详细的说明。
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
42.实施例1
43.本实施例介绍一种应用高压脉冲能量源的多臂消融导管,该导管电极在多电极臂在牵引构件作用下具有增强电极与组织贴靠的能力,自然状态下电极臂呈螺旋拉伸状态以利于顺利通过鞘管,消融放电时能形成封闭的环形消融带,高压脉冲技术是将短暂的高电压施加到组织可以产生每厘米数百伏特的局部高电场,局部高电场通过在细胞膜中产生孔隙来破坏细胞膜(细胞膜变为“渗透”现象)。不同的组织细胞对电压穿透的阈值不一样,采用脉冲电场技术可以选择性的处理心肌细胞(阈值相对较低),而不对其他非靶点细胞组织(如神经、食道、血管、血液细胞等)产生影响,同时由于释放能量时间极短,脉冲技术将不会产生热效应,进而避免组织结痂、肺静脉狭窄等问题。
44.具体的,一种多臂消融导管包括防损伤头端1、近端管体2、电极臂3、电极4和牵引构件6。
45.如图1、2所示,多臂头端7由多个电极臂3组成,电极臂3数量为2-6个,优选为3个,沿垂直于牵引构件6轴线方向呈120
°
均匀分布,电极臂3材质优选为具有高弹性的聚氨酯材质制成,每个电极臂3上均匀间隔布置电极4,电极4材料可以为铂铱合金、黄金,若电极4长度需足够长,优选为黄金材料,以适应电极臂3的曲率。每个电极臂3上布置多个电极4,本实施例示意设置3个电极4,每个电极臂3上的多个电极4形成电极组,消融时电极4间形成消融带,均匀对称的消融带覆盖以牵引构件6为中心的环形消融区域。电极臂3远端收纳于防损伤头端1,防损伤头端1较低以防止头端损伤组织的风险,电极臂3近端收纳于近端管体2,防损伤头端1与近端管体2以及牵引构件6为同一轴向中心线,牵引构件6内部设置有导丝通道5,导丝通道5头端开放并固定在防损伤头端1,导丝通道5材质为摩擦系数小的聚四氟乙烯,以利于导丝8在内部能顺利通过。单个电极臂3在自然状态下呈螺旋上升形态,螺旋s形,初始螺旋s形态的主要目的是便于在初始时将电极臂3拉伸呈线性放入鞘管11内部,然后进入心脏内部,在垂直牵引构件6轴向俯视图下多个电极臂3分布呈花瓣状态。该形态有利于对腔道组织9的整体覆盖。
46.如图3、4、5,每个电极臂3中部区域上均设置磁定位传感器,分别为螺旋臂定位传感器a 73、螺旋臂定位传感器b 74和螺旋臂定位传感器c 75,防损伤头端1与近端管体2上
分别设置头端定位传感器71和近端定位传感器72,磁定位传感器在磁场发生器内能精确显示其坐标,用于导管定位,结合电极臂3形态特性以及电极组件,在系统设备上可实时显示其形态,拉伸形态,压缩形态以及定位位置。实现无射线操作,减少医生与患者身体负担。
47.为保证稳定的定位数据采集,螺旋臂定位传感器a 73、螺旋臂定位传感器b 74和螺旋臂定位传感器c 75直接固定的设置在支撑构件31上并沿牵引构件轴线(导管轴向中心线)均匀分布。任何状态下,头端定位传感器71和近端定位传感器72形成的中心线与螺旋臂定位传感器a 73、螺旋臂定位传感器b74、螺旋臂定位传感器c 75形成的平面垂直,如此设计便于系统更加精确计算导管整体形态。
48.电极臂3的形态,螺旋s形,主要依靠的内部支撑构件31形态决定,支撑构件31自然状态下呈螺旋拉伸状态,支撑构件31的材料为具有高弹性的记忆合金材料,如镍钛合金(niti)等,能在去除外界力后恢复至初始形态。使电极臂3能进行各种形态变化。
49.如图6-8,多臂头端7自然状态下呈离体螺旋环绕形态,牵引构件6向远端移动时多臂头端7变成线性,用于通过鞘管11以及进入腔道组织9内部,当牵引构件6向近端移动时,多臂头端7上的电极臂3变成圆环形平面状态,更加利于圆形腔道结构的封堵与贴靠,以及对环形消融区域的全部覆盖,提升消融的可靠性。收缩为平面状态时,所有电极4形成一个圆环形的平面并与牵引构件6轴线垂直。
50.为使电极臂3在牵引构件6回缩时所有电极区域形成一个平面状态的圆环,在自然状态下支撑构件31呈螺旋上升状态,其支撑构件电极布置区域33在垂直于牵引构件6轴向的平面投影为一段1/3圆,3个支撑构件电极布置区域33投影就形成了一个圆环形;支撑构件远端32与支撑构件近端34在螺旋上升或下降中逐步延伸至牵引构件6轴线上,支撑构件远端32与支撑构件近端34在支撑构件电极布置区域33在垂直于牵引构件6轴向的平面投影为一条连接圆环与圆心的线。
51.如图9-11,多臂头端7与圆形腔道组织9贴靠应用,电极臂3在牵引构件6以及作用下增加了头端整体刚性,不易发生头端歪斜,在导丝8引导下进入腔道组织9内部后控制牵引构件6回拉,使电极臂3呈圆环形平面,此时形成的圆环形电极平面对腔道组织9进行覆盖。消融放电时,形成完整的环形消融区域。电极间距固定在25mm范围内,电极直径0.83mm,在多臂头端7上的电极臂3呈圆环平面时,圆环形平面上的电极4呈均匀间距分布在圆环上,以利于均匀的环形消融,避免漏点的发生。结合电极在脉冲电场中的电场分析,电场强度在电极表面最大,向外逐渐衰减,且形成连续的消融带,消融电压幅值为500-4000v。
52.如图12-14,应用实例,首先将导丝8伸入到即将被消融隔离的肺静脉10口内部,然后将多臂头端7沿导丝8推送到肺静脉10前庭,整个过程中多臂头端7的形态及多臂头端7与组织的位置关系实时显示,避免x射线使用,当多臂头端7在肺静脉10口部时回退牵引构件6使电极臂3呈圆环形平面状态,然后继续将多臂头端7沿肺静脉10口部将圆环形电极臂3贴靠在肺静脉10口部,然后进行放电消融,封闭的消融隔离带完成对肺静脉10的隔离消融。另一实施例,在圆环形电极臂3贴靠肺静脉10口部时,将导丝8撤出,重新沿导丝通道5送入环形标测导管12,然后进行放电消融,以利于实时观察消融区域内部电活动变化,进一步提升消融的安全与可靠性。
53.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。