1.本发明涉及一种塔机多机构双闭环主从同步控制系统,属于塔机控制技术领域。
背景技术:
2.塔式起重机(tower crane)简称塔机,亦称塔吊,起源于西欧。动臂装在高耸塔身上部的旋转起重机。作业空间大,主要用于房屋建筑施工中物料的垂直和水平输送及建筑构件的安装。由金属结构、工作机构和电气系统三部分组成。金属结构包括塔身、动臂和底座等。工作机构有起升、变幅、回转和行走四部分。电气系统包括电动机、控制器、配电柜、连接线路、信号及照明装置等。
3.市场上千吨米级以上的塔机应用已经很普遍。单机构电机功率无法满足塔机应用需求,大吨位塔机经常采用多台机构联合工作的方式。多机构工作模式中,对多电机工作的同步性精度要求极高,若电机不同步,使吊钩发生倾斜,轻则影响电机、钢丝绳的寿命,重则有倾覆的危险,影响吊装安全性。现有多机构同步控制多采用电机或卷筒速度同步的速度闭环控制方式,无法消除长期运行卷筒位置的累计偏差,并且缺少冗余控制,精准度和可靠性不高。
技术实现要素:
4.本发明的目的在于克服现有技术中的不足,提供一种塔机多机构双闭环主从同步控制系统,采用内层速度闭环和外层位置闭环的冗余双闭环控制,保障塔机多机构同步控制的精准度和可靠性。
5.为达到上述目的,本发明是采用下述技术方案实现的:
6.本发明提供了一种塔机多机构双闭环主从同步控制系统,包括:
7.采用主从控制的多个变频驱动装置,且每个变频驱动装置均基于控制信号通过驱动电机带动卷筒运动;
8.多个速度编码器,安装于各电机处,检测电机速度后反馈实时速度信号至对应的变频驱动装置,所述变频驱动装置基于实时速度信号实时进行电机速度同步控制;
9.多个位置编码器,安装于各卷筒处,检测卷筒位置后反馈卷筒位置信号至控制器,所述位置编码器响应于卷筒位置偏差超限时进行卷筒位置同步纠正。
10.进一步的,所述变频驱动装置包括一个主变频驱动装置和多个从变频驱动装置,所述控制信号包括含有相同速度给定值的主控制信号和从控制信号,所述主控制信号由一控制器输出至主变频驱动装置,所述从控制信号由主变频驱动装置输出至从变频驱动装置。
11.进一步的,所述主、从变频驱动装置之间采用共用控制单元或光纤通讯进行数据通讯。
12.进一步的,所述变频驱动装置接收实时速度信号后,基于速度给定值和实时速度信号对电机进行速度调节,直至速度给定值和实时速度信号相同后结束调节。
13.进一步的,所述变频驱动装置响应于实时速度信号小于速度给定值时,驱动电机提升速度。
14.进一步的,所述变频驱动装置响应于实时速度信号大于速度给定值时,驱动电机降低速度。
15.进一步的,所述控制器接收卷筒位置信号后,通过向对应变频驱动装置附加给定速度对电机进行速度调节。
16.进一步的,所述控制器接收卷筒位置信号后,响应于多机构卷筒位置偏差小于预先设定的限值时,不进行卷筒位置同步纠正。
17.进一步的,所述控制器接收卷筒位置信号后,响应于多机构卷筒位置偏差大于预先设定的限值时,进行卷筒位置同步纠正。
18.进一步的,所述卷筒位置同步纠正包括通过调节电机速度将卷筒位置纠正至预定的偏差范围内,使多机构卷筒位置恢复同步。
19.进一步的,所述控制器响应于多机构卷筒经位置编码器检测非同步后,继续卷筒位置同步纠正过程。
20.进一步的,所述控制器响应于多机构卷筒经位置编码器检测确定同步后,退出卷筒位置同步纠正过程。
21.进一步的,所述控制器响应于接收到某台卷筒滞后于其他卷筒位置信号时,通过降低其他卷筒对应的电机速度直至卷筒位置同步。
22.进一步的,所述控制器与变频驱动装置之间通过外部端子连接或通讯总线进行数据通讯。
23.进一步的,所述速度编码器为增量型速度编码器,所述位置编码器为绝对值编码器。
24.与现有技术相比,本发明所达到的有益效果:
25.本发明提出一种塔机多机构双闭环主从同步控制方法及系统,采用主从控制模式,内层速度闭环和外层位置闭环的冗余双闭环控制,主从模式和速度闭环,可使速度同步精准度高,内层速度闭环一直有效,外层位置闭环只在位置偏差超限时有效,可消除速度同步的长期累积偏差,且速度闭环和位置闭环控制为冗余控制,任一闭环失效,另一闭环依然具有同步控制作用,本方案以电机速度为控制对象,以卷筒位置为控制目标,可保障多机构塔机同步控制的精准度、安全性和可靠性。
附图说明
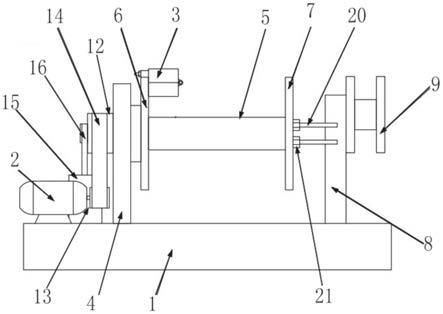
26.图1是本发明实施例提供的四起升同步的保护框图。
具体实施方式
27.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
28.实施例:
29.一种塔机多机构双闭环主从同步控制系统,请参阅图1,所用设备主要包括plc控制器、变频驱动装置、通讯总线、增量型编码器(速度编码器)和绝对值编码器(位置编码器)
等,其中:
30.plc控制器:用于与变频驱动装置进行总线通讯(也可通过外部端子连接),发布启停命令及速度给定,同时可接收卷筒位置信号,通过对任一变频驱动装置附加给定速度进行速度调节,实现位置同步;
31.变频驱动装置:用于驱动电机,并接收速度编码器传来的电机速度信号,实现速度闭环控制,同时与其他变频驱动装置之间进行总线通讯,实现主从控制;
32.速度编码器:安装于电机处,用于检测电机速度,并反馈至变频驱动装置,与变频驱动装置形成内层速度闭环,本实施例中采用增量型速度编码器对电机进行速度检测;
33.位置编码器:安装于电机驱动的卷筒处,用于检测卷筒位置,并反馈至plc控制器,与plc控制器形成外层位置闭环,本实施例中采用绝对值编码器对卷筒进行位置检测;
34.通讯总线:用于控制器和变频驱动装置之间、变频驱动装置与变频驱动装置之间进行数据通讯。
35.需要说明的是,变频驱动装置之间为主从控制,以一台变频驱动装置为主变频驱动装置,其他三台均为从变频驱动装置,由plc控制器输入的外部控制信号只与主变频驱动装置相连,主变频驱动装置将从变频驱动装置控制字和速度给定值发送给所有从变频驱动装置,从变频驱动装置启停命令及及给定速度与主变频驱动装置保持一致。变频驱动装置之间进行总线通讯,实现主从控制,可采用共用控制单元、光纤通讯或其它总线网络通讯方式。
36.plc控制器可与变频驱动装置进行总线通讯,也可通过外部端子连接,发布启停命令及速度给定,接收卷筒位置信号,plc控制器可通过对任一变频驱动装置附加给定速度实现对任一电机进行速度调节,从而达到调整卷筒位置的目的。
37.内层速度闭环和外层位置闭环组成冗余双闭环控制,双闭环方式互为冗余,以电机速度为控制手段,以卷筒位置为最终控制对象,且任一闭环控制失效时,另一闭环控制依然有效,其中:
38.内层速度闭环为内层闭环,一直有效,首先使主从变频驱动装置给定速度相同,其次通过每台变频驱动装置各自的速度闭环,响应于实时速度信号小于速度给定值时,驱动电机提升速度;响应于实时速度信号大于速度给定值时,驱动电机降低速度,使电机实际速度与变频驱动装置给定速度保持一致,从而达到各电机速度同步。
39.外层位置闭环直接检测卷筒位置,当多机构卷筒位置偏差超限时开始位置调节,为保证塔机运行安全,为避免位置调节过于频繁,当多机构卷筒位置偏差小于预先设定的限值,即认为多机构卷筒实现同步,当位置偏差超限时,plc控制器通过对某一台或多台变频驱动装置附加给定速度,可实现在主给定速度一样的情况下,调节任一电机速度,电机通过减速机将卷筒位置纠正至预定的偏差范围内,使多机构卷筒位置恢复同步,当多机构卷筒经绝对值编码器检测,确定同步后退出位置纠正过程,取消变频驱动装置附加给定速度,再经增量型编码器检测后,反馈给变频驱动装置形成速度闭环,各变频驱动装置通过速度闭环保证多机构电机速度同步。其中:位置调节原则为如多台机构中其中一台出现滞后于其他机构的位置偏差时,则通过降低其他电机速度而非增加此台电机速度,实现位置同步,保障运行安全。本实施例中速度闭环与位置闭环冗余,提高吊钩动作精准度,且安全可靠性好。
40.本实施例通过多机构变频驱动装置主从控制和速度闭环,可以实现多台电机的速度同步;长期运行后,由于累积偏差的存在,会出现位置偏差超限,虽然速度依然同步,但无法消除累积偏差;通过位置闭环,由控制器对某一台或多台变频驱动装置附加给定速度,从而调节任一电机速度,将卷筒位置纠正至预定的偏差范围内;同步后,退出位置调整,继续速度同步控制。
41.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。