技术特征:
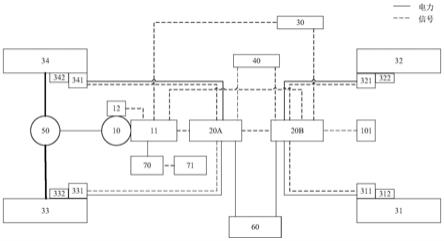
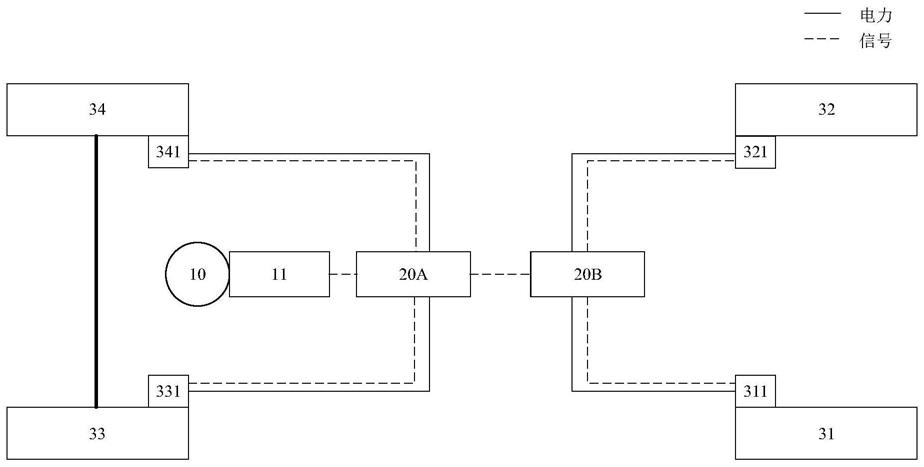
1.一种用于车辆的制动系统,其特征在于,所述制动系统包括控制模块(20a、20b)和为车轮提供制动力的电子机械制动装置(311、321、331、341),所述控制模块(20a、20b)接收为车辆提供驱动扭矩的至少一个驱动马达(10)的转速信息以及至少一个车轮(31、32、33、34)的轮速传感器信息,并且比较所述驱动马达(10)的转速信息和所述车轮的轮速传感器信息的刷新率,从而使用其中刷新率较高者生成的车轮的转速。2.如权利要求1所述的制动系统,其特征在于,所述控制模块(20a、20b)构造为当使用驱动马达(10)的转速信息或车轮的轮速传感器信息生成车轮的转速时,还使用另一者生成的车轮的转速进行验证。3.如权利要求2所述的制动系统,其特征在于,当所述驱动马达(10)的转速信息生成的车轮的转速和车轮的轮速传感器信息生成的车轮的转速之间的偏差大于预设值时,始终使用轮速传感器信息生成的车轮的转速。4.如权利要求2或3所述的制动系统,其特征在于,所述控制模块(20a、20b)构造为在当所述轮速传感器信息的刷新率高于驱动马达(10)的转速信息的刷新率时所述轮速传感器信息生成的车轮的转速与所述驱动马达的转速信息生成的车轮的转速之间的偏差小于预设值的情况下,当所述轮速传感器信息的刷新率低于驱动马达(10)的转速信息的刷新率时,使用驱动马达(10)的转速信息生成的车轮的转速。5.如权利要求1-4中任一所述的制动系统,其特征在于,所述驱动马达(10)经由差速装置(50)驱动一对驱动轮(33、34),所述控制模块(20a、20b)构造为,当其中一个驱动轮(33;34)的轮速传感器信息缺失时,基于所述驱动马达(10)的转速信息和另一个驱动轮(34;33)的轮速传感器信息推算所述驱动轮的转速。6.如权利要求1-4中任一所述的制动系统,其特征在于,所述至少一个驱动马达(10)为至少一对驱动马达,其中,所述车辆的一对驱动轮(33、34;31、32)彼此独立地被驱动。7.如权利要求6所述的制动系统,其特征在于,所述控制模块(20a、20b)根据驱动马达(10)的转速信息和驱动马达(10)与驱动轮(33、34;31、32)之间的驱动扭矩传动机构的信息生成驱动轮(33、34;31、32)的转速。8.如权利要求6所述的制动系统,其特征在于,所述控制模块(20a、20b)构造为,当其中一个驱动轮(33、34;31、32)的轮速传感器信息缺失时,使用其对应的所述驱动马达(10)的转速信息生成的驱动轮的转速。9.如前述权利要求中任一项所述的制动系统,其特征在于,所述控制模块(20a、20b)包括冗余的驱动马达控制单元(14'),能够至少部分地实现对所述驱动马达的驱动器(13)的控制。10.如前述权利要求中任一项所述的制动系统,其特征在于,所述制动系统包括两个所述控制模块(20a、20b),每一所述控制模块与至少一对电子机械制动装置(311、321;331、341)构成一个制动回路。11.一种对车辆进行制动的方法,车辆的制动系统包括控制模块(20a、20b)和为车轮(31、32、33、34)提供制动力的电子机械制动装置(311、321、331、341),所述控制模块(20a、20b)接收为车辆提供驱动扭矩的至少一个驱动马达(10)的转速信息以及至少一个车轮(31、32、33、34)的轮速传感器信息,所述方法包括以下步骤:
a)对所述驱动马达(10)的转速信息的刷新率和所述车轮(31、32、33、34)的轮速传感器信息的刷新率进行比较;b)使用所述驱动马达(10)的转速信息和所述车轮(31、32、33、34)的轮速传感器信息中刷新率较高者生成车轮的转速。12.如权利要求11所述的对车辆进行制动的方法,其特征在于,还包括以下步骤:使用所述驱动马达(10)的转速信息和所述车轮(31、32、33、34)的轮速传感器信息中的另一个进行验证。13.如权利要求12所述的对车辆进行制动的方法,其特征在于,还包括以下步骤:计算所述驱动马达(10)的转速信息生成的车轮(31、32、33、34)的转速和所述车轮的轮速传感器信息生成的车轮的转速之间的偏差值;在所述偏差值大于预设值时,始终使用车轮(31、32、33、34)的轮速传感器信息生成的车轮的转速。14.如权利要求12或13所述的对车辆进行制动的方法,其特征在于,还包括以下步骤:在当所述轮速传感器信息的刷新率高于驱动马达(10)的转速信息的刷新率时所述轮速传感器信息生成的车轮的转速与所述驱动马达(10)的转速信息生成的车轮的转速之间的偏差小于预设值的情况下,则当所述轮速传感器信息的刷新率低于驱动马达(10)的转速信息的刷新率时,使用驱动马达(10)的转速信息生成的车轮的转速。15.如权利要求11至14中任一项所述的对车辆进行制动的方法,其特征在于,所述驱动马达经(10)由差速装置(50)驱动一对驱动轮(33、34),所述方法还包括以下步骤:当其中一个驱动轮(33;34)的轮速传感器信息缺失时,基于所述驱动马达(10)的转速信息和另一个驱动轮(34;33)的轮速传感器信息推算所述驱动轮(33;34)的转速。16.如权利要求11至14中任一项所述的对车辆进行制动的方法,其特征在于,所述至少一个驱动马达(10)为至少一对驱动马达,其中,所述车辆的一对驱动轮(33、34;31、32)彼此独立地被驱动,并且所述方法还包括以下步骤:根据驱动马达(10)的转速信息和驱动马达(10)与驱动轮(33、34;31、32)之间的驱动扭矩传动机构的信息生成驱动轮(33、34;31、32)的转速。17.如权利要求16所述的对车辆进行制动的方法,其特征在于,还包括以下步骤:当其中一个驱动轮(33、34;31、32)的轮速传感器信息缺失时,使用其对应的所述驱动马达(10)的转速信息生成的驱动轮的转速。18.如权利要求11至17中任一项所述的对车辆进行制动的方法,其特征在于,所述控制模块(20a、20b)包括冗余的驱动马达控制单元(14’),所述方法还包括以下步骤:当驱动马达控制器(11)故障时,借助所述冗余的驱动马达控制单元(14’)对所述驱动马达的驱动器(13)进行控制。
技术总结
本发明提出了一种用于车辆的制动系统和制动方法。制动系统包括控制模块和为车轮提供制动力的电子机械制动装置。控制模块接收为车辆提供驱动扭矩的至少一个驱动马达的转速信息以及至少一个车轮的轮速传感器信息,并且比较驱动马达的转速信息和车轮的轮速传感器信息的刷新率,从而使用其中刷新率较高者生成的车轮的转速。本发明提出的制动系统能够获取更为准确的车轮转速,从而改善车辆控制。从而改善车辆控制。从而改善车辆控制。
技术研发人员:尼尔森
受保护的技术使用者:瀚德万安(上海)电控制动系统有限公司
技术研发日:2020.08.24
技术公布日:2022/2/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。