1.本发明涉及一种用于接缝路面舒适性分析的汽车动力学建模仿真分析方法,属于车辆动力学仿真技术领域。
背景技术:
2.随着人们生活水平的提高,人们对车辆舒适性的要求越来越高,良好的车辆舒适性能已经成为现代汽车的重要性能。影响车辆舒适性能的关键因素是车辆的振动与噪声,特别是当车辆行驶在不平坦路面时,极易造成车辆的抖动与异响,给驾乘人员带来不良影响。随着我国基础设施的不断完善,路面也变得越来越平坦,凸凹不平路面越来越少,但是接缝路面却随处可见,因此有必要深入研究接缝路面对车辆舒适性的影响,并提升接缝路面车辆的舒适性能。车辆平顺性仿真技术在提升车辆舒适性方面起到了重要的作用。当前车辆平顺性仿真方法多数是采用adams/car软件建立车辆动力学模型,并将车辆动力学模型放置到四立柱上进行随机路面与脉冲路面的平顺性仿真,提取并分析车辆质心位置的加速度,粗略判断车辆舒适性的优劣。上述车辆平顺性仿真方法存在的问题包括:(1)车辆在路面上行驶时会同时受到x向、y向与z向激励,而四立柱只能进行z向加载,降低了平顺性仿真精度;(2)加速度测点多为车辆质心位置,不能反映驾乘位置的平顺性;(3)车辆平顺性试验数据处理是按照gb/t4970-2009标准计算得到的驾乘人员人体综合总加权加速度均方根值,仿真数据无法跟试验数据进行对标;(4)根据仿真数据也无法评价车辆舒适性的好坏,只能做方案的对比分析。为了解决上述问题,同时为了提高车辆平顺性仿真精度,本发明提出了一种用于接缝路面舒适性分析的汽车动力学建模仿真分析方法。
技术实现要素:
3.本发明的目的是,提出一种用于接缝路面舒适性分析的汽车动力学建模仿真分析方法,该方法可以提高车辆平顺性仿真精度,使仿真结果能够真实反映驾乘人员的振动水平,以解决现有车辆平顺性仿真方法的局限性与仿真精度低的问题。
4.为实现上述目的,本发明采用的技术方案如下:一种用于接缝路面舒适性分析的汽车动力学建真分析方法,包括如下步骤:
5.步骤1,建立车辆刚柔耦合多体动力学模型;
6.步骤2,创建座椅-假人模型和接缝路面模型;
7.步骤3,车辆仿真模型数据与试验数据对标;
8.步骤4,接缝路面车辆平顺性仿真计算;
9.步骤5,驾驶员人体振动加速度采集、处理与加权计算;
10.步骤6,车辆舒适性评价。
11.进一步的,所述步骤1的建立车辆刚柔耦合多体动力学模型,包括如下步骤:
12.步骤1.1,在adams/view中分别建立轮胎模型、悬架模型、车架与车身模型,添加构件的材料属性,设置部件间约束关系;
13.步骤1.2,所述轮胎模型的建立步骤为:进行轮胎模态试验,以及不同压力和滑移速度下胎面橡胶的摩擦特性试验,根据试验数据修改ftire轮胎模型参数;
14.步骤1.3,所述悬架模型的建立步骤为:对悬架中的弹簧进行刚度试验,对减振器进行阻尼试验,并根据试验数据设置悬架系统中的弹簧模型与减振器模型;
15.步骤1.4,所述车架与车身模型的建立步骤为:分别建立车架与车身底板有限元模型,计算车架及车身底板模态,并提取车架和车身底板的mnf文件,建立车架与车身底板的柔性体模型;
16.步骤1.5,进行车身橡胶弹垫刚度和阻尼试验,并根据试验数据设置车身弹垫模型的刚度与阻尼参数;建立车辆质心坐标,并在质心位置建立质量块,设置质量块的质量属性,并将质量块固联在车身底板上;
17.步骤1.6,采用模型整合命令将轮胎模型、悬架模型、车架与车身模型进行虚拟装配,建立整车刚柔耦合动力学模型。
18.进一步的,所述步骤2的创建座椅-假人模型和接缝路面模型,包括如下步骤:
19.步骤2.1,测量假人模型的脚部车身地板刚度k1、驾驶员座椅座垫与靠背的刚度k2与k3、驾驶员座椅座垫与靠背的阻尼c2与c3,根据试验数据设置驾驶员座椅模型中座垫和靠背刚度与阻尼;
20.步骤2.2,测量人体坐立状态的质量分布,分别为脚部质量m1、座垫上方的质量m2和垂直座椅靠背方向上的质量m3;
21.步骤2.3,根据前述步骤,在脚底板位置建立m1的质量块,通过刚度为k1的弹簧垂直连接在车身底板上;在座椅座垫上方建立m2的质量块,通过刚度与阻尼为k2和c2的弹簧垂直连接在座垫支撑上;在座椅靠背位置建立m3的质量块,通过刚度与阻尼为k3和c3的弹簧垂直连接在靠背支撑上;
22.步骤2.4,测量横向接缝路面与纵向接缝路面的三维轮廓,在adams软件中建立路面的三维模型;
23.步骤2.5,将座椅—假人模型和路面模型集成到步骤1中建立的车辆刚柔耦合动力学模型。
24.进一步的,所述步骤2.1中的假人模型是通过计算坐立状态人体在脚部、座垫上方与靠背位置的质量分布,用三个质量块近似模拟人体。
25.进一步的,所述步骤2.3中,建立m1质量块与车身底板间的z向移动副,建立m2质量块与座椅座垫间的z向移动副,建立m3质量块与座椅靠背间的x向移动副。
26.进一步的,所述步骤3的车辆仿真模型数据与试验数据对标,包括如下步骤:
27.步骤3.1,对步骤2中建立的含有座椅-假人的车辆刚柔耦合动力学模型进行静平衡仿真,计算车辆整备质量、质心坐标和前后轴荷,并与试验数据进行对标;
28.步骤3.2,分别给前后轮一个瞬时z向脉冲激励,提取车架前后端振动衰减曲线,并对曲线作fft处理,计算前后悬架的偏频、阻尼与变形,并将仿真结果与试验数据进行对标;
29.步骤3.3,固定车辆模型中的前轮与后轮,进行静平衡仿真,提取驾驶员座椅座垫变形数据,并将仿真结果与试验数据进行对标。
30.进一步的,所述步骤4中的接缝路面车辆平顺性仿真计算,包括如下步骤:
31.步骤4.1,将步骤3中校准合格的车辆模型分别以40km/h、50km/h、60km/h、70km/h
的车速匀速通过横向接缝路面,提取假人模型驾驶员脚底部,座垫位置与靠背位置的加速度时域数据;
32.步骤4.2,将步骤3中校准合格的车辆模型分别以40km/h、50km/h、60km/h、70km/h的车速匀速通过纵向接缝路面,提取假人模型驾驶员脚底部,座垫位置与靠背位置的加速度时域数据。
33.进一步的,所述横向接缝路面是指与车辆前进方向垂直的路面,纵向接缝路面是指与车辆前进方向平行的路面。
34.进一步的,所述步骤5中的驾驶员人体振动加速度采集、处理与加权计算,包括如下步骤:
35.步骤5.1,对步骤4中仿真得到的测点位置加速度进行数据处理,计算各测点单轴向加权加速度均方根值;
36.步骤5.2通过不同测点方向倍频带的加权系数分别计算座椅座垫上方、座椅靠背以及驾驶员脚底板位置的总加权加速度均方根值;
37.步骤5.3,通过不同测点方向的轴加权系数,计算人体振动的综合总加权加速度均方根值。
38.本发明的有益效果在于:本发明一种用于接缝路面舒适性分析的汽车动力学建模方法,解决现有车辆平顺性仿真方法的局限性与仿真精度低的问题,提高车辆平顺性仿真精度,使仿真结果能够真实反映驾乘人员的振动水平,具有较高适用性和可操作性。
附图说明
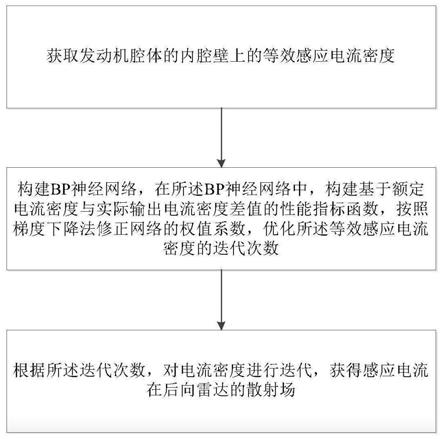
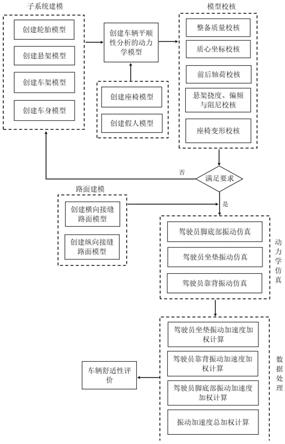
39.图1是本发明的流程框图。
40.图2是本发明的座椅—假人模型示意图。
41.图3是机械结构自由振动衰减曲线示意图。
42.图4是本发明的车架前端振动时域数据。
43.图5是本发明的车架前端振动频域数据。
44.图6是本发明的车架后端振动时域数据。
45.图7是本发明的车架后端振动频域数据。
46.图8是本发明的横向接缝路面座椅坐垫振动时域数据。
47.图9是本发明的横向接缝路面的振动加权数据。
48.图10是本发明的纵向接缝路面的振动加权数据。
具体实施方式
49.下面结合附图对本发明做进一步的说明。
50.本实施例为一种用于接缝路面舒适性分析的汽车动力学建模仿真分析方法,通过对现有车辆平顺性仿真方法现状的分析,发现目前车辆平顺性仿真方法具有较大的局限性,仿真结果不能真实反映驾乘人员的振动水平,而且仿真精度较低,通过本发明提供一种用于接缝路面舒适性分析的汽车动力学建模仿真分析方法以解决上述问题,有效提高车辆平顺性仿真精度。包括以下步骤:
51.建立车辆刚柔耦合多体动力学模型。
52.创建轮胎模型的步骤为:
53.轮胎模态试验,以及不同压力和滑移速度下胎面橡胶的摩擦特性试验;
54.在adams/view软件中建立轮胎模型,根据试验数据修改ftire轮胎模型参数;
55.创建悬架模型的步骤为:
56.对悬架中的弹簧进行刚度试验,对减振器进行阻尼试验;
57.在adams/view中建立弹簧模型、减震器模型、稳定杆模型、摆臂模型,并设置部件间的约束关系;
58.根据试验数据设置悬架模型中的弹簧刚度曲线与减震器阻尼曲线。
59.创建车架与车身模型的步骤为:
60.建立车架有限元模型,计算车架模态,提取车架mnf文件,建立车架柔性体模型;
61.建立车身底板有限元模型,计算车身底板模态,提取车身底板mnf文件,建立车身底板柔性体模型;
62.测量车身橡胶弹垫刚度与阻尼,建立车架与车身底板间的弹垫模型,根据试验数据设置弹垫模型的刚度与阻尼;
63.建立车辆质心坐标,并在质心位置建立质量块,设置质量块的质量属性,并将质量块固联在车身底板上。
64.采用模型整合命令将轮胎模型、悬架模型、车架与车身模型进行虚拟装配,建立整车刚柔耦合动力学模型。
65.创建座椅—假人模型和接缝路面模型。
66.创建座椅—假人模型的步骤为:
67.测量驾驶员脚底板局部刚度k1;
68.测量座椅座垫与靠背刚度k2与k3,测量座椅座垫与靠背的阻尼c2与c3;
69.测量人体坐立状态质量分布,脚部质量m1、座垫上方的质量m2和垂直座椅靠背方向的质量m3;
70.将驾驶员座椅骨架导入到adams/view中,设置质量属性,添加与车身的约束关系;
71.参照图2,在脚底板位置建立质量为m1质量块,通过刚度为k1的弹簧垂直连接在车身底板上;在座椅座垫上方建立质量为m2的质量块,通过刚度与阻尼为k2和c2的弹簧垂直连接在座垫支撑上;在座椅靠背位置建立质量为m3的质量块,通过刚度与阻尼为k3和c3的弹簧垂直连接在靠背支撑上;
72.建立m1质量块与车身底板间的z向移动副,建立m2质量块与座椅座垫间的z向移动副,建立m3质量块与座椅靠背间的x向移动副。
73.创建接缝路面模型的步骤为:
74.采用激光扫描仪测量横向与纵向接缝路面三维轮廓,通过数据分析获取路面节点数据;
75.在adams/view中,采用三角网格构建路面法创建横向与纵向三维虚拟接缝路面模型;
76.设置路面与轮胎间的接触关系。
77.车辆仿真模型数据与试验数据对标。
78.整备质量、质心坐标与前后轴荷校核:
79.固定步骤1建立的车辆刚柔耦合动力学模型的前轮与后轮,进行静平衡仿真,提取车辆的总质量和质心坐标,前轴荷与后轴荷;
80.将车辆模型的总质量、质心坐标,前轴荷与后轴荷与设计参数进行对比,若两者数据吻合度》98%,认为模型精度满足要求,对标结果如表1所示,各项校准结果均大于98%,满足要求。
81.表1整备质量、质心坐标与前后轴荷校核结果
[0082][0083]
悬架挠度、偏频与阻尼校核的步骤为:
[0084]
固定模型后轮,给前轮一个脉冲位移激励,提取车架前端加速度时间历程曲线;
[0085]
固定模型前轮,给后轮一个脉冲位移激励,提取车架后端加速度时间历程曲线;
[0086]
机械结构振动系统的阻尼系数可以根据图3振动衰减曲线上的振幅衰减比例来求解,即根据每个周期采样的幅值ai与下一个相邻周期幅值a
i 1
,按照公式(1)计算振动对数衰减率δ,根据公式(2)计算对应的阻尼系数ξ,悬架自由衰减曲线如图4与图6所示,仿真结果与试验结果吻合度均大于90%,模型精度满足要求;
[0087][0088][0089]
对车架前后端加速度时域数据进行fft处理转化为频域数据,计算悬架偏频,并将仿真结果与试验结果进行对比,如图5与图7所示,仿真结果与试验结果吻合度均大于90%,模型精度满足要求。
[0090]
座椅变形校核的步骤为:
[0091]
身高175cm,体重75kg的驾驶员坐立在座椅上,测量坐垫的变形量为14.8mm;
[0092]
对步骤1建立的车辆刚柔耦合动力学模型进行静平衡仿真,提取弹簧k2的变形量为15.5mm,与试验数据的吻合度为95.4%,满足要求。
[0093]
接缝路面车辆平顺性仿真计算的步骤为:
[0094]
将步骤3中校准合格的车辆模型分别以40km/h、50km/h、60km/h、70km/h、的车速匀速通过横向接缝路面,提取驾驶员脚底部,座垫位置与靠背位置的加速度时域数据;以座垫位置为例,如图8所示,每个位置都需采集x、y、z三个方向的加速信号;
[0095]
将步骤3中校准合格的车辆模型分别以40km/h、50km/h、60km/h、70km/h的车速匀速通过纵向接缝路面,提取驾驶员脚底部,座垫位置与靠背位置的加速度时域数据。
[0096]
驾驶员人体振动加速度采集、处理与加权计算,包括如下步骤:
[0097]
根据gb/t4970-2009标准对步骤4中仿真得到的测点位置加速度进行数据处理,计算各测点单轴向加权加速度均方根值;
[0098]
根据gb/t4970-2009标准规定的不同测点方向倍频带的加权系数,分别计算座椅座垫上方、座椅靠背,以及驾驶员脚底板位置的总加权加速度均方根值;
[0099]
根据gb/t4970-2009标准规定的不同测点方向的轴加权系数,计算人体振动的综合总加权加速度均方根值;
[0100]
横向接缝路面与纵向接缝路面的振动加权数据如图9与图10所示,对驾驶员综合总加权加速度均方根值的贡献量依次是座椅座垫、座椅靠背和脚底板的振动。
[0101]
车辆舒适性评价。
[0102]
根据gb/t4970-2009标准规定的综合总加权加速度均方根值与人体主观感觉之间的关系,结合步骤5计算得到的综合总加权加速度均方根值来评价车辆舒适性能。横向接缝路面车辆舒适性评价如表2所示,纵向接缝路面车辆舒适性评价如表3所示。
[0103]
表2横向接缝路面车辆舒适性评价结果
[0104][0105]
表3纵向接缝路面车辆舒适性评价结果
[0106][0107]
以上仅就本发明较佳的实例作了说明,但不能理解为是对权利要求的限制。本发明不仅局限于以上实例,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神与原则之内,所做的任何修改、等同替换、改进等,均应包含在在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。