1.本发明涉及一种基于轴耦合的车辆刚柔耦合动力学建模方法,属于车辆动力学仿真技术领域。
背景技术:
2.在进行车辆动力学仿真分析时,由于一些零部件弹性变形比较明显,振动较大,如果依然将这些零部件当作刚性体看待,势必会降低车辆动力学仿真精度。因此,需要将弹性变形大的零部件当成柔性体处理,建立刚性体与柔性体共存的车辆多体动力学模型。但是在建立零部件柔性体模型方面,目前多数建模方法均采用自由状态下的模态中性文件,与实际状态存在差异,降低了车辆动力学仿真精度。同时,目前多数的车辆动力学建模方法中都含有路面模型和轮胎模型,其中路面模型多采用二维随机生成路面或三维虚拟重构路面,与真实路面轮廓的误差较大,势必会降低车辆动力学仿真精度。轮胎模型多采用adams软件自带模型,软件自带轮胎模型参数与实际车辆轮胎参数之间存在很大的偏差,造成车辆动力学仿真结果的失真;同时在处理轮胎与地面间的接触问题时,多采用等效路形方法,所用等效路形与实际输入路面还存在差异,这也造成了仿真误差。为了提高了车辆动力学仿真精度,减少了仿真与试验之间的误差,提出一种基于轴耦合的车辆刚柔耦合动力学建模方法。
技术实现要素:
3.本发明的目的是,提出一种基于轴耦合的车辆刚柔耦合动力学建模方法,该方法可以提高柔性体建模精度,解决路面模型与轮胎模型不确定性对车辆动力学仿真结果的影响问题,同时为提高车辆动力学仿真精度,减少仿真与试验之间的误差。
4.为实现上述目的,本发明采用的技术方案如下:一种基于轴耦合的车辆刚柔耦合动力学建模方法,包括如下步骤:
5.步骤1,建立不包含路面模型与轮胎模型的车辆多刚体动力学模型;
6.步骤2,建立车辆刚柔耦合动力学模型;
7.步骤3,建立具有三向位移输入功能的虚拟试验台;
8.步骤4,实际道路工况采集轴头与车架相对位移数据;
9.步骤5,进行车辆动力学仿真与模型校准。
10.进一步的,所述步骤1包括如下步骤:
11.步骤1.1,从车辆三维模型中提取悬架硬度坐标、发动机悬置硬点坐标、车身质心坐标、转向系统硬度坐标与传动系统硬点坐标,并在adams/view中建立车辆悬架、发动机悬置、车身、转向系统和传动系统的空间位置坐标;
12.步骤1.2,计算车辆发动机、车身与传动系统的质量与转动惯量,计算弹性元件的刚度,阻尼元件的阻尼系数;
13.步骤1.3,根据前述步骤中的硬点坐标分别建立车辆各系统的结构模型,并添加构
件的质量属性,按照系统间的连接关系设置零部件间的约束关系,建立车辆各系统的动力学模型;
14.步骤1.4,将前述步骤中获得的车辆各系统动力学模型集成到adams/view同一平台上,设置各系统间的约束关系,建立车辆多刚体动力学模型,所述车辆多刚体动力学模型中不包含路面模型与轮胎模型;
15.步骤1.5,对建立的车辆多刚体动力学模型进行自由度和静平衡仿真,验证模型的准确性。
16.进一步的,所述步骤2包括如下步骤:
17.步骤2.1,采用有限元软件对弹性零部件模型进几何清理、抽中面、网格划分、网格质量优化,并添加材料属性和约束关系;
18.步骤2.2,对前述步骤中的零部件有限元模型进行约束模态仿真计算,并提取模态中性文件;
19.步骤2.3,将前述步骤中的零部件模态中性文件导入到adams/view中建立柔性体模型,并校核柔性体模型的固有频率、振型和质量信息;
20.步骤2.4,用前述步骤中建立的柔性体模型替代相应的刚性体模型,并重新设置约束关系,建立车辆刚柔耦合动力学模型;
21.步骤2.5,对建立的车辆刚柔耦合动力学模型进行模态仿真与静平衡仿真,验证模型的准确性。
22.进一步的,所述步骤2中弹性零部件应当成柔性体处理,刚性零部件应当成刚性体处理。
23.进一步的,所述步骤3包括如下步骤:
24.步骤3.1,在每个轴头位置,即车轮轮心处建立一个浮动平台;
25.步骤3.2,沿x、y、z三个方向上距每个浮动平台相同距离分别设置一个滑块,并在各滑块与浮动平台之间分别设置一个弹簧,所述弹簧的刚度为轮胎垂向刚度的100倍;
26.步骤3.3,各滑块与地面之间分别建立移动副,所述移动副的方向指向滑块;
27.步骤3.4,在各移动副上分别设置一个驱动滑块;
28.步骤3.5,在浮动平台与各驱动滑块之间分别设置一个双向弹簧;
29.步骤3.6,采用模型整合技术,将车辆刚柔耦合动力学模型集成到虚拟试验台上,设置轴头与浮动平台间的约束关系,建立基于轴耦合的车辆刚柔耦合动力学模型。
30.进一步的,所述步骤3中,三向位移输入是指在每个浮动平台上同时添加x向、y向与z向的位移激励,驱动车辆动作。
31.进一步的,所述步骤4包括如下步骤:
32.步骤4.1,在每个轴头与车架之间沿x、y、z三个方向上各布置一根拉丝传感器,采用lms采集器轴头与车架间的相对位移;
33.步骤4.2,采用数据后处理软件对采集的相对位移数据进行滤波处理、去毛刺处理和去漂移处理;
34.步骤4.3,将前述步骤中处理后的x、y、z三个方向的相对位移试验数据转化成txt.文件;
35.步骤4.4,将x、y、z三个方向的相对位移试验数据txt.文件导入到adams中建立x、
y、z三个方向的相对位移spline曲线。
36.进一步的,所述步骤5包括如下步骤:
37.步骤5.1,采用akispl,函数调用步骤4中建立的x、y、z三个方向的相对位移spline曲线,进行动力学仿真;
38.步骤5.2,采集车辆动力学模型中车架上的加速度时域数据;
39.步骤5.3实际道路工况,采集三向加速度传感器与lms设备采集车架上的加速度时域数据;
40.步骤5.4,将车架加速度仿真结果与试验数据进行对标分析,最终证明该建模方法的仿真精度。
41.本发明的有益效果在于:
42.本发明一种基于轴耦合的车辆刚柔耦合动力学建模方法,综合运用刚柔耦合动力学原理,有限元理论和虚拟迭代技术建立一种基于轴耦合的车辆刚柔耦合动力学模型,提高了柔性体建模精度,避开了传统建模方法中的路面模型与轮胎模型误差对仿真精度的影响,提高了车辆动力学仿真精度,具有较高的可靠性,适用性和可操作性。
附图说明
43.图1是本发明的流程框图。
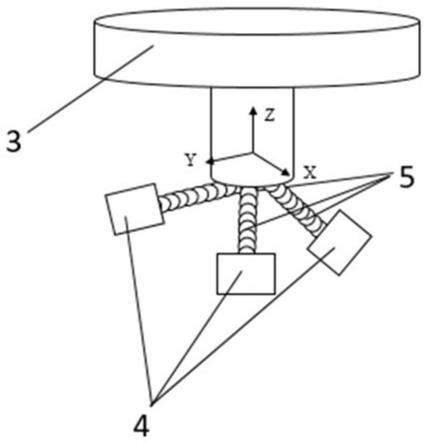
44.图2是本发明的基于轴耦合的车辆刚柔耦合动力学模型示意图。
45.图3为图2的局部示意图。
46.其中,1-虚拟试验台;2-车辆动力学模型;3-浮动平台;4-滑块;5-弹簧。
具体实施方式
47.下面结合附图对本发明做进一步的说明。
48.本实施例为一种基于轴耦合的车辆刚柔耦合动力学建模方法,通过对现有车辆动力学建模方法现状的分析,发现目前所采用柔性体建模方法、路面模型与轮胎模型会明显降低车辆动力学仿真精度,通过本发明提供一种基于轴耦合的车辆刚柔耦合动力学建模方法以解决上述问题,有效提高车辆动力学仿真精度。
49.该方案的实现主要包括以下步骤:
50.建立不包含路面模型与轮胎模型的车辆多刚体动力学模型。
51.建立车辆多刚体动力学模型的步骤为:
52.从车辆三维模型中提取各个硬点坐标,并在adams/view中建立车辆各系统的空间位置坐标;
53.计算车辆各个系统的质量与转动惯量,计算弹性元件的刚度,阻尼元件的阻尼系数;
54.根据硬点坐标分别建立前桥、后桥、前悬架、后悬架、动力悬置系统、车架和车身动力学模型,并添加构件的质量属性,设置约束;
55.通过子系统模型合并,建立车辆多刚体动力学模型,模型中不包含路面模型与轮胎模型;
56.对建立的车辆多刚体动力学模型进行自由度和静平衡校核,验证模型的准确性。
57.建立车辆刚柔耦合动力学模型,包括如下步骤:
58.采用有限元软件对车架三维模型进几何清理、抽中面、网格划分、网格质量优化,并添加材料属性和约束关系;
59.对车架有限元模型进行约束模态仿真计算,并提取模态中性文件。
60.将车架约束模态中性文件导入到adams/view中,并校核车架柔性体模型的固有频率、振型和质量信息;
61.用车架柔性体模型替代车架刚体模型,并重新设置约束关系,建立车辆刚柔耦合动力学模型;
62.对建立的车辆刚柔耦合动力学模型进行模态仿真与静平衡仿真,验证模型的准确性;车架模态校准结果见表1,车辆质量与质心坐标校准结果见表2。
63.表1车架模态校准结果
[0064][0065][0066]
表2车辆质量与质心坐标校准结果
[0067][0068]
建立具有三向位移输入功能的虚拟试验台,参见图2,包括如下步骤:
[0069]
在每个轴头位置(车轮轮心处)建立1个浮动平台;
[0070]
沿x、y、z三个方向上距每个浮动平台200mm位置各建一个滑块;
[0071]
滑块与大地之间建立移动副,移动副方向指向滑块;
[0072]
在每个移动副上各建1个驱动滑块;
[0073]
在浮动平台与每个驱动滑块之间各建立1根弹簧,轮胎垂向刚度为650n/mm,弹簧刚度约为65000n/mm;
[0074]
采用模型整合技术,将车辆刚柔耦合动力学模型集成到虚拟试验台上,设置轴头与浮动平台间的约束关系,建立基于轴耦合的车辆刚柔耦合动力学模型:
[0075]
采集实际道路工况轴头与车架相对位移数据,包括如下步骤:
[0076]
在每个轴头与车架之间沿x、y、z三个方向上各布置一根拉丝传感器,采用lms采集器轴头与车架间的相对位移;
[0077]
采用数据后处理软件对采集的相对位移数据进行滤波处理、去毛刺处理和去漂移处理;
[0078]
将处理后的x、y、z三个方向的相对位移试验数据转化成txt.文件;
[0079]
将x、y、z三个方向的相对位移试验数据txt.文件导入到adams中建立x、y、
[0080]
z三个方向的相对位移spline曲线。
[0081]
车辆动力学仿真与模型校准,包括如下步骤:
[0082]
采用akispl(time,0,spline name,0)函数调用步骤(4)中建立的x、y、z三个方向的相对位移spline曲线,进行动力学仿真;
[0083]
采集车辆动力学模型中车架上的加速度时域数据;
[0084]
实际道路工况,采集三向加速度传感器与lms设备采集车架上的加速度时域数据;
[0085]
将车架加速度仿真结果与试验数据进行对标分析,不同车速下车架左前端加速度均方根值对标结果见表3,车架左后端加速度均方根值对标结果见表4,前悬架隔振率对标结果见,5,后悬架隔振率对标结果见表6。
[0086]
表3车架左前端加速度均方根值对标结果
[0087]
车速(km/h)30507090110仿真结果(m/s2)0.330.370.450.480.54试验结果(m/s2)0.310.40.440.520.58吻合度93.9%92.5%97.8%92.3%93.1%
[0088]
表4车架左后端加速度均方根值对标结果
[0089]
车速(km/h)30507090110仿真结果(m/s2)0.390.480.540.610.77试验结果(m/s2)0.420.460.580.660.83吻合度92.9%95.8%93.1%92.4%92.8%
[0090]
表5前悬架隔振率对标结果
[0091]
车速(km/h)30507090110仿真结果63.0%67.0%64.0%62.0%59.0%试验结果59.0%62.0%59.0%63.0%61.0%吻合度93.7%92.5%92.2%98.4%96.7%
[0092]
表6后悬架隔振率对标结果
[0093]
车速(km/h)30507090110仿真结果55.0%59.0%56.0%52.0%51.0%试验结果51.0%55.0%59.0%56.0%56.0%吻合度92.7%93.2%94.9%92.9%91.1%
[0094]
表3~表6仿真数据与试验数据的吻合度均大于90%,证明了本发明一种基于轴耦合的车辆刚柔耦合动力学建模方法能够提高车辆动力学仿真精度,具有较高的可靠性,适用性和可操作性。
[0095]
除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。