用于能够悬停的航空器的旋翼
1.相关申请的交叉引用
2.本专利申请要求于2019年6月13日提交的欧洲专利申请第19180113.3号的优先权,其全部公开内容通过引用并入本文。
技术领域
3.本发明涉及一种用于能够悬停的航空器(例如,直升机、推力换向式飞机或复合直升机)的旋翼。
4.特别地,本发明涉及用于直升机的旋翼。
背景技术:
5.已知直升机基本上包括机身、位于机身顶部并能围绕其自身轴线旋转的主旋翼以及位于机身末端的尾旋翼。
6.更详细地说,每个主旋翼或尾旋翼基本上包括:
[0007]-动力单元;
[0008]-叶毂,其可围绕上述轴线旋转并配备有多个桨叶,这些桨叶径向紧固到上述叶毂上并从该叶毂突出;以及
[0009]-主轴,其与动力单元连接并可操作地连接至叶毂以驱动它旋转。
[0010]
此外,每个主旋翼包括插入在动力单元与主轴之间并具有支撑箱的传动单元,该支撑箱相对于主轴的旋转轴线是固定的并且被约束在直升机的机身上。
[0011]
特别地,传动单元的支撑箱通过相对于主轴的旋转轴线倾斜的多个杆和业内被称为“抗扭矩梁”的梁而被约束到机身上。
[0012]
主旋翼的运行代表传递到直升机的最重要的振动源,该振动本质上是由于作用在每个桨叶上的空气动力学载荷的周期性变化造成的。
[0013]
事实上,在主轴的每一次完整旋转期间,主旋翼的每个桨叶在旋转参照系中都受到频率为ω及其倍数(2*ω、3*ω等)的周期性载荷,其中ω是主轴的转速。进而,桨叶所受到的载荷会引起同样是周期性的可变惯性载荷和结构载荷。
[0014]
更具体地,上述载荷引起随时间变化的力和力矩,这些力和力矩通过主旋翼的叶毂和支撑结构传递到机身,从而降低机身中乘员的舒适度。
[0015]
振动载荷沿轴向和与主轴的旋转轴线正交地作用在叶毂和主轴上。
[0016]
在业内众所周知,作用在旋翼桨叶上的轴向振动载荷仅以n*ω及其相关的倍数的角频率被传递到叶毂并因此传递到机身,其中ω是主轴的转速,n代表旋翼的桨叶数。
[0017]
相反,对于旋转系统中与主轴的旋转轴线正交的振动载荷,只有角频率为(n 1)*ω、(n-1)*ω及其倍数的谐振通过叶毂被传递到固定系统,但它们也被叶毂接收,因此它们在机身上以n*ω及相关的倍数2*n*ω、3*n*ω等的角频率被感知到。
[0018]
根据前述内容,业内明显感到需要限制具有上述角频率的振动从主轴到机身的传递,该角频率等于主轴转速与旋翼桨叶数的乘积,即,n*ω,这是迄今为止幅度最大的谐振。
[0019]
为此,存在已知的被动和主动的衰减装置,它们适于衰减振动向机身的传递。
[0020]
主动衰减装置实质上是致动器,其在叶毂或主轴上施加谐振力,该谐振力抵消产生振动的力。
[0021]
在相同申请人名下的专利申请ep-a-2857313中说明了这些主动衰减装置的例子。
[0022]
该专利申请描述了一对致动器的使用,该对致动器可操作地连接至主轴并且是可控制的以在主轴上产生相应的反力,这些反力在与主轴的旋转轴线正交的平面内具有分量。
[0023]
主动衰减装置的其他例子在专利申请us-a-2016/0325828和专利us-b-8,435,200中有所描述。
[0024]
另外,us-a1-2013/0011260描述了一种减振装置,其包括:弹性体;动态质量体;以及可控质量体。动态质量体由减振对象通过弹性体支撑。致动器使可控质量体相对于动态质量体移动。这种减振装置可以通过使可控质量体相对于动态质量体适当移动来改变动态质量体相对于减振对象振动的频率和幅度,从而使振动对象的振动能够更可靠地减少。另外,即使在可控质量体相对于动态质量体是固定的情况下,这样的减振装置也可以减少减振对象的特定频率的振动。
[0025]
主动衰减装置具有能够根据叶毂和主轴的振动条件的变化来改变其特性的优点。
[0026]
被动衰减装置基本上包括共振系统,该共振系统配备有通过弹性系统悬挂在主轴或叶毂上的质量体。这些悬挂的质量体的振动能够至少部分地衰减振动向机身的传递。通过适时地选择悬挂的质量体的值和弹性系统的刚度,这些衰减装置通常被调整到要被衰减的精确振动频率。
[0027]
在某些类型的直升机中,可以在以下值之间选择性地改变主轴的旋转角速度:
[0028]-在直升机的正常运行状态下采取的标称的第一值;以及
[0029]-在直升机的特定运行状态下使用的第二值,第二值大于第一值。
[0030]
例如,第二值等于第一值的102%。
[0031]
角速度的这种变化改变了传递到机身的振动载荷的角频率,使仅在以谐振频率为中心的非常窄的频率范围内有效的被动谐振吸收器部分无效。
[0032]
发生这种情况是因为被动减振器通常被调整到主轴的第一标称角速度值,因此对于当主轴以第二角速度旋转时衰减振动向机身的传递,没有完全得到优化。
[0033]
业内意识到需要在主轴的第一角速度和第二角速度下以及在另外的角速度下都以最佳方式衰减轴向振动向机身的传递,同时保持被动吸收器的结构和实施的简便性。
技术实现要素:
[0034]
本发明的目的是提供一种用于能够悬停的航空器的旋翼,其允许以简单且廉价的方式满足上述需求。
[0035]
上述目的是通过本发明实现的,因为本发明涉及权利要求1所限定的用于能够悬停的航空器的旋翼。
附图说明
[0036]
为了更好地理解本发明,下面仅通过非限制性例子并参照附图来描述优选实施方
式,在附图中:
[0037]-图1是包括根据本发明的实施方式的旋翼的直升机的前视图,为了清楚起见,没有完全示出各零件;
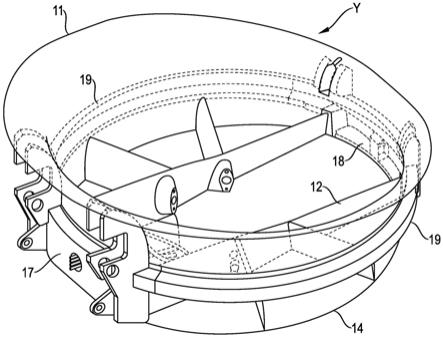
[0038]-图2是图1中旋翼的传动壳体的放大比例的前视图;
[0039]-图3以放大比例示出了图2中的衰减装置;并且
[0040]-图4和图5以进一步放大的比例示出了处于当旋翼的主轴的角速度分别采取彼此不同的第一值和第二值时的相应的操作构造的图2和图3的衰减装置。
具体实施方式
[0041]
参照图1,附图标记1表示能够悬停的航空器、特别是直升机,其基本上包括机身2、位于机身2顶部并围绕轴线a旋转的主旋翼3以及位于机身2的末端并围绕其自身的横向于轴线a的轴线旋转的尾旋翼4。
[0042]
更详细地,旋翼3包括具有轴线a的中空的叶毂5,叶毂5承载多个悬臂安装的桨叶9,这些桨叶相对轴线a径向延伸。
[0043]
参照图2,旋翼3还包括主轴6,主轴6以相对于与机身2成一体的参照系的角速度ω围绕轴线a旋转,与叶毂5在角度上成一体并以未被示出的方式与由直升机1承载的动力单元(例如,涡轮机)耦合。
[0044]
旋翼3还包括适于将动力从动力单元传递到主轴6的传动单元7。
[0045]
详细地,传动单元7尤其包括相对于轴线a固定的定子8。
[0046]
定子8以已知方式与机身2连接,例如通过抗扭矩梁和相对于轴线a倾斜的多个杆。
[0047]
此外,动力单元可选择性地控制,以驱动主轴6、叶毂5和桨叶9围绕轴线a旋转:
[0048]-在直升机1的正常运行状态下,角速度ω等于标称值ω1;或者
[0049]-在直升机1的特定运行状态下,角速度ω等于不同于标称值ω1的值ω2。
[0050]
在所示的情况下,值ω2大于标称值ω1。更具体地,角速度ω2大约等于角速度ω1的102%。
[0051]
主轴6部分被容纳在叶毂5内并与叶毂5在角度上成一体(图2)。
[0052]
特别地,主轴6是中空的。
[0053]
旋翼3还包括振动衰减装置15,以衰减平行于轴线a的振动向机身2的传递。换言之,衰减装置15衰减主轴6上的轴向振动。
[0054]
在所示的情况下,衰减装置15是被动的并且是可重新配置的。
[0055]
衰减装置15也与轴线a同轴。
[0056]
衰减装置15基本上包括(图3至图5):
[0057]-沿轴线a延伸的壳体20;
[0058]-可在壳体20内平行于轴线a滑动的质量体21;以及
[0059]-用于以在壳体20内沿轴线a滑动的方式支撑质量体21的弹性装置22。
[0060]
弹性装置22插入在壳体20与质量体21之间并具有平行于轴线a的整体刚度k。
[0061]
更具体地,壳体20包括:
[0062]-与轴线a实质上正交的一对轴向端壁50和51;以及
[0063]-在壁50和51之间延伸的圆柱形壁52。
[0064]
弹性装置22包括一对弹簧23,它们在质量体21的相应的相互相对的轴向两侧插入在质量体21与壳体20之间。
[0065]
在所示的情况下,弹簧23是“并列”配置的螺旋弹簧,即,它们在振荡运动期间经受相同的变形。由此得出每个弹簧23具有等于k/2的刚度。
[0066]
一个弹簧23插入在质量体21与壳体20的壁50之间,另一个弹簧23插入在质量体21与壳体20的壁51之间。
[0067]
有利地,衰减装置15还包括:
[0068]-另外的质量体25,其也在壳体20内平行于轴线a滑动;
[0069]-连接元件30,当主轴6的角速度ω采取值ω1时,该连接元件30使质量体21和25可一体地沿轴线a移动;以及
[0070]-致动器35,当主轴6的角速度ω采取值为ω2时,致动器35可被启动以使质量体21和25根据沿轴线a的平移而分离。
[0071]
在所示的情况下,壳体20连接至定子8。
[0072]
替代地,壳体20被容纳在主轴6内,如图2中的虚线所示。在该实施方式中,衰减装置15还包括适于将位于机身2上的电源连接至致动器35的滑环。
[0073]
当主轴6的角速度ω采取值ω1时,衰减装置15表现得像具有等于质量体21和25的总和的质量和沿轴线a的刚度k的调谐质量吸收器。这些质量和刚度值被确定为使得衰减装置15被调整到角频率等于ω1并因此衰减具有该角频率ω1的沿轴线a的振动向机身2的传递。
[0074]
相反,当主轴6的角速度ω采取值ω2时,衰减装置15表现得像具有等于质量体21的质量和沿轴线a的刚度k的调谐质量吸收器。这些质量和刚度值被确定为使得衰减装置15被调整到角频率等于ω2并因此衰减具有该角频率ω2的沿轴线a的振动向机身2的传递。
[0075]
更详细地,连接元件30是磁性的。更具体地,质量体21和25由可磁化材料制成,优选铁磁性材料。
[0076]
连接元件30是紧固到质量体21上的永磁体。
[0077]
在所示的情况下,连接元件30被配置为产生平行于轴线a定向的第一磁场。
[0078]
连接元件30还包括关于轴线a同轴并紧固到质量体21上的一对圆盘状物31和32。
[0079]
圆盘状物31和32分别限定了永磁体的相互相反的磁极。
[0080]
质量体21包括(图4和图5)布置在靠近壁50侧的轴向端部26,轴向端部26以固定的方式接收连接元件30并限定肩部34,在所示的情况下肩部34具有截头圆锥形状。
[0081]
质量体25包括与壁50相对并且面向质量体21的轴向端部26的轴向端部24。
[0082]
更具体地,轴向端部24包括:
[0083]-肩部28,该肩部适于当主轴6的角速度ω等于值ω1时抵靠在肩部34上;以及
[0084]-与肩部28轴向相对的肩部29。
[0085]
在所示的情况下,肩部28具有截头圆锥形状并且肩部29具有扁平环的形状。
[0086]
在图4和图5所示的构造中,连接元件30在质量体25上施加吸力fm,该吸力fm平行于轴线a并在与重力相同的方向上从壁50朝向壁51定向(即,在图2至图5中向下)。
[0087]
结果,当主轴6的角速度ω采取值ω1时,质量体25受到重力、力fm和惯性力。连接元件30和质量体25的尺寸被设置为使得上述力的合力保持质量体25被约束到质量体21上。
[0088]
致动器35可选择性地控制以在质量体25上施加力fa,该力平行于轴线a并且在与重力相反的方向上从壁51朝向壁50定向(即,在图4和图5中向上)。
[0089]
结果,当主轴6的角速度ω采取值ω2时,质量体25受到重力、力fm、惯性力和另外的力fa。
[0090]
致动器35的尺寸被设置为产生力fa,该力的值使得施加在质量体25上的上述力的合力从壁51朝向壁50,并使质量体25与质量体21轴向分离。
[0091]
更详细地,致动器35是电磁性的。
[0092]
更详细地说,致动器35包括:
[0093]-未被示出的电流发生器;
[0094]-围绕轴线a具有环形形状的多个环形的电绕组36(仅示意性示出);以及
[0095]-磁场发生器27,其被配置为产生相对于轴线a径向定向的第二磁场,并且与质量体25一体地限定。
[0096]
更详细地,环形的电绕组36被容纳在铁磁材料的金属电枢49内,该金属电枢49被紧固在壳体20上并具有定向由发生器27产生的磁场的功能。
[0097]
相反,发生器27可相对于壳体20平行于轴线a移动。
[0098]
更具体地,发生器27布置在质量体25的相对于质量体25的端部28轴向相对的部分上。
[0099]
发电机的启动导致电流在电绕组36中循环。该电流相对于轴线a环形地循环并浸在由发生器27产生的第二磁场中,该第二磁场相对于轴线a为径向并与电枢49的铁磁材料相关。
[0100]
由于洛伦兹力的影响以及电绕组36相对于轴线a是固定的,因此在质量体25上产生力fa。
[0101]
衰减装置15还包括传感器39(仅在图4和图5中示意性示出),传感器39适于产生与主轴6的角速度ω相关联的信号并可操作地连接至致动器35。
[0102]
在所示的情况下,传感器39被紧固到壳体20的壁50上。
[0103]
衰减装置15还包括在功能上与传感器39和致动器35连接的控制单元60,如图3示意性所示。
[0104]
更详细地,控制单元60被编程为:
[0105]-当传感器39检测到主轴6的角速度ω采取值ω1(图4)时,停用致动器35,以保持质量体21和25彼此成一体;以及
[0106]-当传感器39检测到主轴6的角速度ω采取值ω2(图5)时,启动致动器35,以使质量体21和25分离并解耦。
[0107]
衰减装置15还包括:
[0108]-行程元件的一对端部40和41,该对端部相对于壳体20是固定的并且布置在质量体21和25的相应的相对侧,并适于限定用于质量体21和25的振荡运动的相应的相互相对的端部止动件;以及
[0109]-约束元件45(图3),其插入在壳体20与质量体21之间,并被设计为防止质量体21在弹簧23围绕轴线a扭转之后围绕轴线a旋转。
[0110]
特别地,行程元件的端部40和41相对于质量体21分别布置在壁50侧和壁51侧。
[0111]
当主轴6的角速度ω等于值ω1并且致动器35因此被停用时,行程元件的端部40和41限制质量体21和25平行于轴线a的联合振荡(图4)。
[0112]
当主轴6的角速度ω等于值ω2并且致动器35因此被启动时,行程元件的端部40抵靠在质量体25的肩部29上,停止在平行于轴线a的方向上远离质量体21的移动(图5)。
[0113]
在使用中,动力单元通过传动单元7驱动叶毂5、主轴6和桨叶9围绕轴线a旋转。
[0114]
从主轴6以相对于与机身2成一体的参照系等于标称值ω1的角速度ω围绕轴线a旋转的状态开始描述直升机1的操作。
[0115]
叶毂5和桨叶9的旋转产生振动,该振动会传递到主轴6并从主轴6传递到直升机1的机身2。
[0116]
这些振动相对于机身的固定系统主要具有等于n*ω1的角频率。
[0117]
这些振动向机身2的传递被衰减装置15衰减。
[0118]
更详细地,传感器39检测到主轴6的角速度ω等于值ω1,并且控制单元60保持致动器35被停用。在这些情况下,在绕组36中没有电流循环。
[0119]
质量体25通过连接元件30的永磁体与质量体21保持接触。
[0120]
更具体地,质量体25受到重力、由连接元件30的磁体施加的力fm以及由于其自身沿轴线a的振荡运动而产生的惯性力。这些力的合力被定向为保持质量体21和25彼此接触。
[0121]
在这些情况下,质量体21和25以及发生器27沿轴线a彼此成一体地振荡,并在沿轴线a的振荡运动中由弹簧23弹性地支撑。
[0122]
结果,衰减装置15表现得像具有等于质量体21和25的总和的质量和沿轴线a的刚度k的调谐质量吸收器。这些质量和刚度值被确定为使得衰减装置15被调整到角频率等于ω1。因此,衰减装置15有效地衰减具有该角频率ω1的沿轴线a的振动向机身2的传递。
[0123]
质量体21和25沿轴线a的振荡分别受到壁50侧和壁51侧的行程元件的端部40和41的限制。
[0124]
约束元件45防止了质量体21和25围绕轴线a的意外旋转。
[0125]
在直升机1的特定飞行状态下,动力单元驱动主轴6以相对于与机身2成一体的参照系等于值ω2的角速度ω围绕轴线a旋转。
[0126]
由与主轴6和叶毂5的旋转相关联的机械和空气动力学载荷产生的振动主要具有相对于机身的固定参照系等于n*ω2的角频率。
[0127]
在这些情况下,传感器39检测到主轴6的角速度ω等于值ω2,并且控制单元60启动致动器35,从而引起绕组36中的电流循环并因此在质量体25上产生力fa。
[0128]
更具体地,在绕组36中相对于轴线a环形地循环的电流与由发生器27的永磁体产生的第二磁场相互作用。
[0129]
由于该磁场相对于轴线a径向定向,产生的洛伦兹力平行于轴线a并且等于绕组36和承载发生器27的永磁体的质量体25之间的力fa。
[0130]
质量体25因此受到重力、由连接元件30的磁体施加的力fm和力fa。
[0131]
这些力的合力导致质量体25平行于轴线a从质量体21移开,直到达到质量体25的肩部29抵靠在行程元件的端部40上的状态(图5)。
[0132]
这些力的合力在与重力相反的方向上从壁51朝向壁50定向。结果,这个合力使质量体21和25彼此分离并保持质量体21与致动器35接触。
[0133]
衰减装置15因此表现得像具有等于质量体21的质量和沿轴线a的刚度k的调谐质量吸收器。这些质量和刚度值被确定为使得衰减装置15被调整到角频率等于ω2并因此衰减具有该角频率ω2的沿轴线a的振动向机身2的传递。
[0134]
质量体21沿轴线a的振荡在壁50侧受到质量体25的肩部28的限制并在壁51侧受到行程元件的端部41的限制。
[0135]
约束元件45确保质量体21在例如由于弹簧23的意外扭转造成的沿轴线a的振荡运动期间不能围绕轴线a旋转。
[0136]
从对根据本发明的旋翼3的特性的检查来看,由此可以实现的优点是显而易见的。
[0137]
特别地,当主轴6的角速度ω等于标称值ω1时,在沿轴线a的振荡运动中,衰减装置15的质量体25可与质量体21一体地移动。相反,当主轴6的角速度ω等于不同于标称值ω1的值ω2时,衰减装置15的质量体25与质量体21分离并解耦。
[0138]
结果,当主轴6和桨叶9以等于标称值的角速度ω1旋转时,衰减装置15表现得像具有等于质量体21和25的总和的质量和沿轴线a的刚度k的调谐质量吸收器。在这种情况下,衰减装置15被调整到角频率ω1,并因此能够有效地衰减具有角频率ω1的振动向机身2的传递,从而提高乘客的舒适度。
[0139]
相反,当主轴6和桨叶9以不同于标称值的角速度ω2旋转时,衰减装置15表现得像具有恰好等于质量体21的质量和沿轴线a的刚度k的调谐质量吸收器。在这种情况下,衰减装置15被调整到角频率ω2,并因此能够有效地衰减具有角频率ω2的振动向机身2的传递,从而即使当旋翼3以大于标称值的角速度ω2旋转时也能提高乘客的舒适度。
[0140]
当主轴6和桨叶9以等于标称值的角速度ω1旋转时,连接元件30有效地保持质量体21和25对于沿轴线a的振荡以一体的方式约束在彼此上。
[0141]
当传感器39检测到主轴6和桨叶9以不同于标称值的角速度ω2旋转时,致动器35有效地在质量体25上施加力fa,以克服由连接元件30施加的力fm的作用。
[0142]
当角速度ω等于值ω1并且致动器35被停用时,行程元件的端部40和41限定用于质量体21和25的振荡运动的相应的相互相对的止动表面。
[0143]
当角速度ω等于值ω1并且致动器35被停用时,行程元件的端部40轴向约束质量体25并且实质上防止轴向振荡。
[0144]
约束元件45有效地防止例如由弹簧23的扭转引起的质量体21围绕轴线a的旋转。
[0145]
最后,很明显,在不脱离权利要求所限定的范围的情况下,可以对本文描述和图示的旋翼3进行修改和变型。
[0146]
特别地,旋翼3还可以包括多个另外的质量体25,当主轴6的角速度ω等于另外的相应值时,另外的质量体25可选择性地连接至质量体21,以将衰减装置15调整到相应的另外的值。
[0147]
代替在直升机1上使用,旋翼3可以在推力换向式飞机或旋翼式螺旋桨飞机或复合直升机上使用。
[0148]
此外,旋翼3可以包括另外的振动衰减装置15,以在垂直于轴线a的平面(即,与主轴6的弯曲振动相关联)内衰减向机身2的振动传递。
[0149]
最后,根据本发明的旋翼可以是直升机1的尾旋翼4而不是主旋翼3。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。