技术特征:
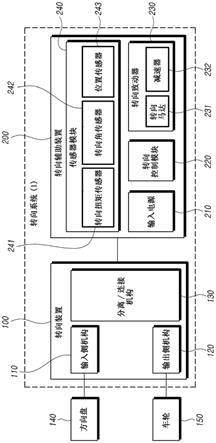
1.一种用于使车辆(2)横向控制得到支持或实现自动化的车道导引驾驶员辅助装置(1),具有:
第一处理单元(3),它设置用于通过确定具有电动辅助转向系统的稳态控制精度的转向角来对转向力矩干预进行控制,
第二处理单元(4),它设置用于通过向第一处理单元(3)输出精度请求信号(g)来调节转向角的稳态控制精度,以使控制精度在下限值和上限值之间缩放,其中,第二处理单元(4)具有控制单元,该控制单元具有包括输入端和输出端的积分器(I),其中,该积分器(I)的输出端以带有与精度请求信号(G)相关的加权的方式反馈到输入端。
2.根据权利要求1所述的车道导引驾驶员辅助装置(1),其中,所述上限值使电动辅助转向系统的稳态控制精度保持不变,其中,下限值实现稳态控制精度的最大预定削减。
3.根据权利要求1或2所述的车道导引驾驶员辅助装置(1),其中,所述精度请求信号(G)设定在所述上限值和所述下限值之间,其中,在上限值处稳态控制误差接近零,其中,在下限值处存在最大允许控制误差。
4.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,所述第二处理单元(4)设置用于借助于时间叠化来调节转向角的控制精度。
5.根据权利要求4所述的车道导引驾驶员辅助装置(1),其中,所述精度请求信号(G)设计成准连续的,其中,所述第二处理装置(4)设计用于在上限值和下限值之间进行插值或叠化。
6.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,所述与精度请求信号(G)相关的加权是增益系数。
7.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,所述第一处理单元(3)包括带有扰动变量接入的控制器,其中,对致动力矩的扰动变量的按比例接入在与精度请求信号(G)相关的加权之后执行。
8.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其特征在于,待调节的控制精度的削减程度借助于两级或多级级联控制单元确定。
9.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,所述第一处理单元(3)包括用于确定具有稳态控制精度的转向角的转向角控制单元,以及用于转向角的前馈控制的前馈控制单元,其中,前馈控制单元的贡献根据在按比例接入到致动力矩之前的精度请求信号(G)的规定进行缩放。
10.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,稳态控制精度具有预定的起始值,直至它被第二处理单元(4)调节。
11.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,所述第二处理装置(4)设置用于当出现方向盘不稳定时和/或当识别到驾驶员干预时以自适应的方式削减控制精度。
12.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其中,在动态驾驶操控期间,当驶入弯道和/或驶出弯道时,以至少70%的精度请求信号(G)确定控制精度。
13.根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1),其特征在于,根据所确定的驾驶模式或根据驾驶员个性化的驾驶行为,当驾驶员转弯时借助于精度预定参数(G)来获取较强或较弱的推荐转矩。
14.一种车辆(2),它具有根据前述权利要求中任一项所述的车道导引驾驶员辅助装置(1)。
15.一种用于利用根据前述权利要求1至13中任一项所述的车道导引驾驶员辅助装置(1)的使车辆(2)横向控制得到支持或实现自动化的方法。
技术总结
本发明涉及一种用于实现对车辆的横向控制的支持或自动化的车道导引驾驶员辅助装置,它包括第一处理单元,该第一处理单元设置用于通过确定具有电动辅助转向系统的稳态控制精度的转向角来控制转向力矩干预,并且包括第二处理单元,该第二处理单元设置用于通过向第一处理单元输出精度请求信号来调节转向角稳态控制精度,以使之在下限值和上限值之间缩放,其中,第二处理单元包括控制单元,该控制单元具有积分器,所述积分器包括输入端和输出端,其中,积分器的输出端以带有与精度请求信号有关的加权的方式反馈到输入端。
技术研发人员:S·菲克;P·凯斯勒;M·西蒙;
受保护的技术使用者:大陆汽车有限责任公司;
技术研发日:2020.06.03
技术公布日:2022.02.25
本文用于企业家、创业者技术爱好者查询,结果仅供参考。