1.本发明涉及微型肠道检查机器人,具体是一种基于绳拉式柔性变径的微型肠道检查机器人。
背景技术:
2.微型肠道检查机器人是一种能够在肠道中主动运动并进行医疗检查的机器人,其被认为是实现肠道疾病微创检查最具前景的器件。在现有技术条件下,微型肠道检查机器人主要分为两种:第一种是仿尺蠖式微型肠道检查机器人。此种微型肠道检查机器人采用连杆来实现变径和驻留功能,其存在的问题是:其一,由于连杆产生的变形为刚性变形,导致机器人的变径方式为刚性变径,由此导致机器人在变径过程中会对肠道内壁造成较严重的刺激,从而使人体感到不适。其二,在运动过程中,机器人的运动效率较低,由此影响肠道检查效率。第二种是履带式微型肠道检查机器人。此种微型肠道检查机器人存在的问题是:无法实现变径和驻留功能,导致其无法很好地适应复杂多变的肠道环境,由此容易造成漏诊。基于此,有必要发明一种基于绳拉式柔性变径的微型肠道检查机器人,以解决现有微型肠道检查机器人在变径过程中使人体感到不适、影响肠道检查效率、容易造成漏诊的问题。
技术实现要素:
3.本发明为了解决现有微型肠道检查机器人在变径过程中使人体感到不适、影响肠道检查效率、容易造成漏诊的问题,提供了一种基于绳拉式柔性变径的微型肠道检查机器人。
4.本发明是采用如下技术方案实现的:一种基于绳拉式柔性变径的微型肠道检查机器人,包括绳拉式柔性变径机构、三个履带式行进机构、控制部分;所述绳拉式柔性变径机构包括机箱a、导向圆管、承托圆管、直流电机a、主动锥齿轮a、两个轴承a、转轴a、从动锥齿轮a、两个转动圆盘、两个滑动圆盘、两根拉绳、柔性套管;机箱a的左右两端均设有敞口;机箱a的后壁贯通开设有装配孔a;机箱a的上壁和下壁各贯通开设有一个装配孔b,且两个装配孔b相互正对;导向圆管的后端面与机箱a的前外壁固定;承托圆管的前端面与机箱a的后外壁固定;直流电机a的输出轴朝前,且直流电机a的输出轴转动贯穿装配孔a;直流电机a的输出轴前端面中央开设有装配盲孔;直流电机a的机座前端固定穿设于承托圆管内;主动锥齿轮a为带轴锥齿轮,且主动锥齿轮a的轮轴固定穿设于装配盲孔内;两个轴承a分别固定装配于两个装配孔b内;转轴a的上部和下部分别固定贯穿两个轴承a的内圈;从动锥齿轮a固定装配于转轴a的侧面,且从动锥齿轮a与主动锥齿轮a啮合;两个转动圆盘的端面中央各贯通开设有一个装配孔c,且两个转动圆盘分别通过两个装配孔c固定装配于转轴a的侧面两端;每个转动圆盘的端面均贯通开设有一对呈前后对称设置的穿绳孔a;两个滑动圆盘的端面中央各贯通开设有一个装配孔d,且两个滑动圆盘分别通过两个装配孔d滑动装配于导向圆管的外侧面和直流电机a的机座外侧面;每
个滑动圆盘的端面上部和端面下部均各贯通开设有一对呈左右对称设置的穿绳孔b;第一根拉绳的首端依次穿过第一个转动圆盘上的一对穿绳孔a、第二个滑动圆盘上的第一对穿绳孔b、第一个转动圆盘上的一对穿绳孔a、第一个滑动圆盘上的第一对穿绳孔b与第一根拉绳的尾端固定;第二根拉绳的首端依次穿过第二个转动圆盘上的一对穿绳孔a、第二个滑动圆盘上的第二对穿绳孔b、第二个转动圆盘上的一对穿绳孔a、第一个滑动圆盘上的第二对穿绳孔b与第二根拉绳的尾端固定;柔性套管为中间粗两端细的腰鼓形结构,且柔性套管的侧面贯通开设有三道沿周向等距排列的轴向应变缝隙;每道轴向应变缝隙的前后两端均封闭,且相邻两道轴向应变缝隙之间形成有一个柔性应变槽体;每个柔性应变槽体的内侧面均开设有四道周向减薄凹槽a;每个柔性应变槽体的外侧面均开设有四道周向减薄凹槽b,且四道周向减薄凹槽b的位置与四道周向减薄凹槽a的位置一一对应;每个柔性应变槽体的外侧面中部均延伸设置有一个柔性卡扣座;柔性套管通过其前端管口滑动装配于导向圆管的外侧面,且柔性套管的前端面与第一个滑动圆盘的后端面固定;柔性套管通过其后端管口滑动装配于直流电机a的机座外侧面,且柔性套管的后端面与第二个滑动圆盘的前端面固定;所述每个履带式行进机构均包括机箱b、直流电机b、主动锥齿轮b、两个轴承b、转轴b、从动锥齿轮b、同步带轮、若干个减阻滚轮、履带;机箱b的前壁右部贯通开设有装配孔e;机箱b的后壁右部贯通开设有装配孔f;机箱b的前外壁左边缘和前外壁右边缘各延伸设置有一个耳板;两个耳板的表面各贯通开设有一个装配孔g,且两个装配孔g相互正对;机箱b的上壁左部和下壁左部各贯通开设有一列装配孔h,且装配孔h的数目与减阻滚轮的数目一致;机箱b的上外壁左边缘、后外壁左边缘、下外壁左边缘共同延伸设置有限位凸边a;机箱b的上外壁中部延伸设置有限位凸边b;机箱b的下外壁中部延伸设置有限位凸边c;机箱b的下外壁右部延伸设置有卡扣头;直流电机b的输出轴朝前,且直流电机b的输出轴转动贯穿装配孔e;直流电机b的机座后端固定穿设于装配孔f内;主动锥齿轮b固定装配于直流电机b的输出轴侧面前端;两个轴承b分别固定装配于两个装配孔g内;转轴b的两端分别固定穿设于两个轴承b的内圈;从动锥齿轮b固定装配于转轴b的侧面中部,且从动锥齿轮b与主动锥齿轮b啮合;同步带轮固定装配于转轴b的侧面左部;各个减阻滚轮一一对应地转动装配于各个装配孔h内,且各个减阻滚轮的轴线均与转轴b的轴线平行;履带同时装配于同步带轮和各个减阻滚轮上;三个履带式行进机构的卡扣头一一对应地插接于绳拉式柔性变径机构的三个柔性卡扣座内;所述控制部分包括圆杯形底座、无线通信电路板、摄像头、保护罩、三个薄膜压力传感器、感应接收线圈;圆杯形底座的杯底中央贯通开设有装配孔i,且圆杯形底座通过装配孔i固定装配于导向圆管的外侧面前端;无线通信电路板固定安装于圆杯形底座内,且无线通信电路板的输出端分别与直流电机a的控制端、三个直流电机b的控制端连接;摄像头的镜头朝前;摄像头的电路板穿过无线通信电路板固定穿设于导向圆管的前端管口内;摄像头的输出端与无线通信电路板的输入端连接;保护罩密封扣接于圆杯形底座的杯口上;三个薄膜压力传感器一一对应地固定安装于三个柔性卡扣座内,且三个薄膜压力传感器与三个卡扣头的下表面一一对应地接触;三个薄膜压力传感器的输出端均与无线通信电路板的输入端连接;
感应接收线圈固定装配于直流电机a的机座外侧面后端,且感应接收线圈的输出端分别与直流电机a的电源端、三个直流电机b的电源端、无线通信电路板的电源端、摄像头的电源端、三个薄膜压力传感器的电源端连接。
5.工作时,无线通信电路板与设置于人体外的计算机双向无线连接。本发明一方面可以实现变径和驻留功能,另一方面可以实现双向运动功能,第三方面可以实现肠道检查功能。具体过程如下:一、变径和驻留功能:计算机通过无线通信电路板向直流电机a发送控制指令,直流电机a通过主动锥齿轮a驱动从动锥齿轮a进行正向转动(反向转动),从动锥齿轮a通过转轴a带动两个转动圆盘进行正向转动(反向转动),由此将两根拉绳收紧(放松)。当两根拉绳收紧时,两根拉绳共同拉动两个滑动圆盘进行相向滑动,两个滑动圆盘共同挤压柔性套管,使得柔性套管上的三个柔性应变槽体沿径向扩张(如图7所示),三个柔性应变槽体一一对应地通过三个柔性卡扣座带动三个履带式行进机构沿径向扩张(沿径向扩张时,三个履带均与肠道内壁紧密接触,由此实现驻留功能)。当两根拉绳放松时,柔性套管推动两个滑动圆盘进行背向滑动,柔性套管上的三个柔性应变槽体沿径向收缩,三个柔性应变槽体一一对应地通过三个柔性卡扣座带动三个履带式行进机构沿径向收缩。二、双向运动功能:计算机通过无线通信电路板向三个直流电机b发送控制指令,三个直流电机b一一对应地通过三个主动锥齿轮b驱动三个从动锥齿轮b进行正向转动(反向转动),三个从动锥齿轮b一一对应地通过三根转轴b带动三个同步带轮进行正向转动(反向转动),三个同步带轮一一对应地带动三个履带沿着肠道内壁进行正向滚动(反向滚动),由此实现双向运动功能。三、肠道检查功能:摄像头采集肠道图像,并通过无线通信电路板将肠道图像发送至计算机。同时,三个薄膜压力传感器采集接触压力,并通过无线通信电路板将接触压力发送至计算机。计算机根据肠道图像和接触压力得出肠道信息,由此实现肠道检查功能。在上述过程中,感应接收线圈负责感应外部交变磁场能量,由此向直流电机a、三个直流电机b、无线通信电路板、摄像头、三个薄膜压力传感器供电。
6.基于上述过程,与现有微型肠道检查机器人相比,本发明所述的一种基于绳拉式柔性变径的微型肠道检查机器人一方面通过绳拉式柔性变径机构实现了变径和驻留功能,另一方面通过履带式行进机构实现了双向运动功能,由此具备了如下优点:其一,与仿尺蠖式微型肠道检查机器人相比,本发明的变径方式为柔性变径,而且运动效率更高,因此其在变径过程中有效减少了对肠道内壁的刺激,从而使人体更加舒适,同时有效提高了肠道检查效率。其二,与履带式微型肠道检查机器人相比,本发明实现了变径和驻留功能,因此其能够很好地适应复杂多变的肠道环境,从而有效避免了漏诊。
7.本发明结构合理、设计巧妙,有效解决了现有微型肠道检查机器人在变径过程中使人体感到不适、影响肠道检查效率、容易造成漏诊的问题,适用于肠道疾病的微创检查。
附图说明
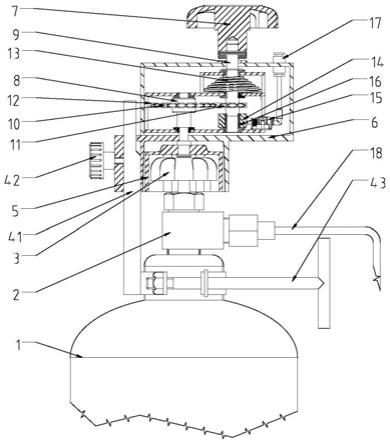
8.图1是本发明的结构示意图。
9.图2是本发明中绳拉式柔性变径机构的结构示意图。
10.图3是本发明中绳拉式柔性变径机构的部分结构示意图。
11.图4是本发明中绳拉式柔性变径机构的部分结构爆炸图。
12.图5是本发明中绳拉式柔性变径机构的部分结构示意图。
13.图6是本发明中柔性套管的结构示意图。
14.图7是本发明中柔性套管的工作状态参考图。
15.图8是本发明中履带式行进机构的结构示意图。
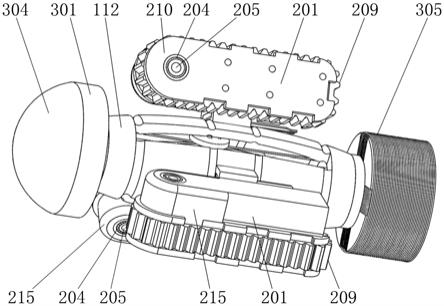
16.图9是本发明中履带式行进机构的结构爆炸图。
17.图10是本发明中履带式行进机构的部分结构示意图。
18.图11是本发明中控制部分的结构爆炸图。
19.图中:101-机箱a,102-导向圆管,103-承托圆管,104-直流电机a,105-主动锥齿轮a,106-轴承a,107-转轴a,108-从动锥齿轮a,109-转动圆盘,110-滑动圆盘,111-拉绳,112-柔性套管,113-周向减薄凹槽a,114-周向减薄凹槽b,115-柔性卡扣座,201-机箱b,202-直流电机b,203-主动锥齿轮b,204-轴承b,205-转轴b,206-从动锥齿轮b,207-同步带轮,208-减阻滚轮,209-履带,210-耳板,211-限位凸边a,212-限位凸边b,213-限位凸边c,214-卡扣头,215-u形挡板,216-限位凸边d,301-圆杯形底座,302-无线通信电路板,303-摄像头,304-保护罩,305-感应接收线圈。
具体实施方式
20.一种基于绳拉式柔性变径的微型肠道检查机器人,包括绳拉式柔性变径机构、三个履带式行进机构、控制部分;所述绳拉式柔性变径机构包括机箱a101、导向圆管102、承托圆管103、直流电机a104、主动锥齿轮a105、两个轴承a106、转轴a107、从动锥齿轮a108、两个转动圆盘109、两个滑动圆盘110、两根拉绳111、柔性套管112;机箱a101的左右两端均设有敞口;机箱a101的后壁贯通开设有装配孔a;机箱a101的上壁和下壁各贯通开设有一个装配孔b,且两个装配孔b相互正对;导向圆管102的后端面与机箱a101的前外壁固定;承托圆管103的前端面与机箱a101的后外壁固定;直流电机a104的输出轴朝前,且直流电机a104的输出轴转动贯穿装配孔a;直流电机a104的输出轴前端面中央开设有装配盲孔;直流电机a104的机座前端固定穿设于承托圆管103内;主动锥齿轮a105为带轴锥齿轮,且主动锥齿轮a105的轮轴固定穿设于装配盲孔内;两个轴承a106分别固定装配于两个装配孔b内;转轴a107的上部和下部分别固定贯穿两个轴承a106的内圈;从动锥齿轮a108固定装配于转轴a107的侧面,且从动锥齿轮a108与主动锥齿轮a105啮合;两个转动圆盘109的端面中央各贯通开设有一个装配孔c,且两个转动圆盘109分别通过两个装配孔c固定装配于转轴a107的侧面两端;每个转动圆盘109的端面均贯通开设有一对呈前后对称设置的穿绳孔a;两个滑动圆盘110的端面中央各贯通开设有一个装配孔d,且两个滑动圆盘110分别通过两个装配孔d滑动装配于导向圆管102的外侧面和直流电机a104的机座外侧面;每个滑动圆盘110的端面上部和端面下部均各贯通开设有一对呈左右对称设置的穿绳孔b;第一根拉绳111的首端依次穿过第一个转动圆盘109上的一对穿绳孔a、第二个滑动圆盘110上的第一对穿绳孔b、第一个转动圆盘109上的一对穿绳孔a、第一个滑动圆盘110上的第一对穿绳孔b与第一根拉绳111的尾端固定;第二根拉绳111的首端依次穿过第二个转动圆盘109上的一对穿绳孔a、第二个滑动圆盘110上的第二对穿绳孔b、第二个转动圆盘109上的一对穿绳孔a、第一个滑动圆盘110上的第二对穿绳孔b与第二根拉绳111的尾端固定;柔性套管112为中间粗两端细的腰鼓形结构,且柔性套管112的侧面贯通开设有三道沿
周向等距排列的轴向应变缝隙;每道轴向应变缝隙的前后两端均封闭,且相邻两道轴向应变缝隙之间形成有一个柔性应变槽体;每个柔性应变槽体的内侧面均开设有四道周向减薄凹槽a113;每个柔性应变槽体的外侧面均开设有四道周向减薄凹槽b114,且四道周向减薄凹槽b114的位置与四道周向减薄凹槽a113的位置一一对应;每个柔性应变槽体的外侧面中部均延伸设置有一个柔性卡扣座115;柔性套管112通过其前端管口滑动装配于导向圆管102的外侧面,且柔性套管112的前端面与第一个滑动圆盘110的后端面固定;柔性套管112通过其后端管口滑动装配于直流电机a104的机座外侧面,且柔性套管112的后端面与第二个滑动圆盘110的前端面固定;所述每个履带式行进机构均包括机箱b201、直流电机b202、主动锥齿轮b203、两个轴承b204、转轴b205、从动锥齿轮b206、同步带轮207、若干个减阻滚轮208、履带209;机箱b201的前壁右部贯通开设有装配孔e;机箱b201的后壁右部贯通开设有装配孔f;机箱b201的前外壁左边缘和前外壁右边缘各延伸设置有一个耳板210;两个耳板210的表面各贯通开设有一个装配孔g,且两个装配孔g相互正对;机箱b201的上壁左部和下壁左部各贯通开设有一列装配孔h,且装配孔h的数目与减阻滚轮208的数目一致;机箱b201的上外壁左边缘、后外壁左边缘、下外壁左边缘共同延伸设置有限位凸边a211;机箱b201的上外壁中部延伸设置有限位凸边b212;机箱b201的下外壁中部延伸设置有限位凸边c213;机箱b201的下外壁右部延伸设置有卡扣头214;直流电机b202的输出轴朝前,且直流电机b202的输出轴转动贯穿装配孔e;直流电机b202的机座后端固定穿设于装配孔f内;主动锥齿轮b203固定装配于直流电机b202的输出轴侧面前端;两个轴承b204分别固定装配于两个装配孔g内;转轴b205的两端分别固定穿设于两个轴承b204的内圈;从动锥齿轮b206固定装配于转轴b205的侧面中部,且从动锥齿轮b206与主动锥齿轮b203啮合;同步带轮207固定装配于转轴b205的侧面左部;各个减阻滚轮208一一对应地转动装配于各个装配孔h内,且各个减阻滚轮208的轴线均与转轴b205的轴线平行;履带209同时装配于同步带轮207和各个减阻滚轮208上;三个履带式行进机构的卡扣头214一一对应地插接于绳拉式柔性变径机构的三个柔性卡扣座115内;所述控制部分包括圆杯形底座301、无线通信电路板302、摄像头303、保护罩304、三个薄膜压力传感器、感应接收线圈305;圆杯形底座301的杯底中央贯通开设有装配孔i,且圆杯形底座301通过装配孔i固定装配于导向圆管102的外侧面前端;无线通信电路板302固定安装于圆杯形底座301内,且无线通信电路板302的输出端分别与直流电机a104的控制端、三个直流电机b202的控制端连接;摄像头303的镜头朝前;摄像头303的电路板穿过无线通信电路板302固定穿设于导向圆管102的前端管口内;摄像头303的输出端与无线通信电路板302的输入端连接;保护罩304密封扣接于圆杯形底座301的杯口上;三个薄膜压力传感器一一对应地固定安装于三个柔性卡扣座115内,且三个薄膜压力传感器与三个卡扣头214的下表面一一对应地接触;三个薄膜压力传感器的输出端均与无线通信电路板302的输入端连接;感应接收线圈305固定装配于直流电机a104的机座外侧面后端,且感应接收线圈305的输出端分别与直流电机a104的电源端、三个直流电机b202的电源端、无线通信电路板302的电源端、摄像头303的电源端、三个薄膜压力传感器的电源端连接。
21.机箱a101、导向圆管102、承托圆管103为一体成型结构。
22.两个转动圆盘109均为台阶形圆盘,且两个转动圆盘109的细段相向设置。
23.柔性套管112的壁厚由两端向中间逐渐减小。
24.柔性套管112和三个柔性卡扣座115均采用tpu软胶3d打印而成。
25.每个柔性应变槽体上的四道周向减薄凹槽a113均分别位于柔性应变槽体的内侧面前端、内侧面中前部、内侧面中后部、内侧面后端;每个柔性应变槽体上的四道周向减薄凹槽b114均分别位于柔性应变槽体的外侧面前端、外侧面中前部、外侧面中后部、外侧面后端。
26.每列减阻滚轮208中位置最靠后的减阻滚轮208均为双排滚轮。
27.限位凸边a211、限位凸边b212、限位凸边c213均为齿形凸边。
28.所述每个履带式行进机构均还包括u形挡板215;u形挡板215的内侧面分别与机箱b201的上外壁右前部、机箱b201的下外壁右前部、位置靠右的耳板210端面固定配合;u形挡板215的外侧面左边缘延伸设置有限位凸边d216。
29.无线通信电路板302为圆形电路板;保护罩304采用透明材料制成。
30.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式作出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。