1.本发明涉及具备安装夹具的曳引机单元以及其安装方法。
背景技术:
2.以往,电梯通过在升降路内移动电梯轿厢,来将乗客和货物输送到任意的楼层。在这种电梯中,需要作为驱动机的曳引机,作为其安装方法,例如,有在独立于升降路而设置的机械室具备曳引机的类型、以及不设置机械室而在升降路内具备曳引机的无机房类型。
3.在由于通往天花板方向的空间的限制而无法将机械室设置于升降路的正上部的情况下,采用将曳引机安装于设置在升降路的侧面的机械室的、所谓的水平方式。
4.在水平方式的情况下,由于需要水平方式专用的曳引机,因此需要对构成曳引机的器材进行与通常不同的制造,需要时间和精力。为了解决该难点,研究安装方法,以使能够应用通常的曳引机,从原始的曳引机的形式旋转90
°
,垂直安装。
5.不过,由于器材出厂时无法倾斜到规定的形式,因此需要现场作业时在限定的空间内旋转并配置在安装位置。以往,在对安装于机械梁上的曳引机、所谓的曳引机单元进行安装的情况下,如图23所示,将机械梁的两端作为悬吊源部110,将作为吊具的作业绳索120卡合于悬吊源部110,旋转整个曳引机单元100进行安装。注意不破坏平衡而以i至iii的三个步骤进行作业,曳引机单元100以从原始形态相对于地板130大概垂直的形式安装于壁面140。
6.然而,在这种情况下,需要在包含机械梁的两端的至少两处设置悬吊源,并通过作业绳索等的吊具抬起,因此调整该作业绳索的两个作业人员需要配合时刻,同时进行作业,另外,为了作为悬吊源使用两处,需要充分地确保悬挂作业绳索的空间。
7.现有技术文献
8.专利文献
9.专利文献1:日本国特开平2-261788号公报
10.专利文献2:日本国特许第5791206号公报
技术实现要素:
11.本发明所要解决的技术问题
12.因此,在本发明中,提出一种安装有安装夹具的曳引机单元,其应使需要的人力比以往少,只在一处存在悬吊源也能够进行作业,能够旋转至规定的设置位置适当地进行配置。
13.用于解决技术问题的技术方案
14.实施方式提供一种曳引机单元,其具备:
15.曳引机,驱动电梯;
16.机械梁部件,设置所述曳引机;
17.悬吊源部,设置于所述机械梁部件的端部附近,卡合用于与所述机械梁部件一并
吊起所述曳引机的吊具;以及
18.第一安装夹具,所述第一安装夹具的下端部与载置所述机械梁部件的地板接触,通过所述悬吊源部的吊起,以与所述地板的触点为基点,旋转所述曳引机,
19.所述第一安装夹具具备固定或者卡合于所述机械梁部件的旋转轴、以及具有插入该旋转轴的贯通孔的支撑部,在所述旋转轴固定于所述机械梁部件的情况下,所述旋转轴通过所述贯通孔卡合于所述支撑部,在所述旋转轴卡合于所述机械梁部件的情况下,所述旋转轴通过所述贯通孔固定或者卡合于所述支撑部,所述第一安装夹具设置于所述机械梁部件中的、所述悬吊源部的相反侧的端部附近。
20.另外,实施方式提供一种曳引机单元的安装方法,是将机械室设置于升降路的侧面的、水平方式的电梯中的曳引机单元的安装方法,其特征在于,
21.所述曳引机单元具备:曳引机,是电梯的驱动机;机械梁部件,设置所述曳引机;悬吊源部,设置在位于所述机械梁部件的端部附近的第一安装位置,并且能够卡合吊具;以及第一安装夹具,作为所述曳引机单元旋转时的基点,
22.所述第一安装夹具具有相对于所述悬吊源部设置在相反侧的端部附近的旋转轴、以及具有插入所述旋转轴的贯通孔的支撑部,以所述第一安装夹具为基点,通过拉起卡合有所述吊具的所述悬吊源部,来使所述曳引机旋转90
°
,并将所述机械梁部件安装在壁面或者柱子上。
附图说明
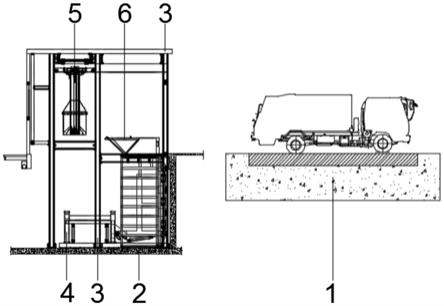
23.图1是示出本实施方式的水平方式的电梯的整体结构的图。
24.图2是曳引机单元的主视图。
25.图3是图2的曳引机单元的右侧视图。
26.图4是示出安装夹具的构造的立体图。
27.图5是示出千斤顶的构造的主视图。
28.图6是示出对于安装夹具的构造,(a)存储千斤顶时与(b)抬高千斤顶时的主视图。
29.图7是示出对于安装夹具的构造,(a)存储千斤顶时与(b)抬高千斤顶时的侧视图。
30.图8是具有其他构造的安装夹具的立体图(变形例1)。
31.图9是具有其他构造的安装夹具的立体图(变形例2)。
32.图10是具有其他构造的安装夹具的立体图(变形例3)。
33.图11是示出旋转轴与机械梁的关系的立体图。
34.图12是示出旋转轴与机械梁的关系的剖面图。
35.图13是示出旋转轴与安装夹具的关系的立体图。
36.图14是示出旋转轴与安装夹具的关系的剖面图。
37.图15是示出设置安装夹具的位置的主视图。
38.图16是示出设置安装夹具的位置的主视图(2)。
39.图17是示出旋转曳引机单元时的作业的流程的图。
40.图18是示出旋转曳引机单元时的其他作业的流程的图(2)。
41.图19是具有其他结构的曳引机单元的主视图(2)。
42.图20是对图19的安装夹具周边进行说明的放大主视图。
43.图21是具有其他结构的曳引机单元的主视图(3)。
44.图22是对图21的安装夹具周边进行说明的放大主视图。
45.图23是示出旋转以往的曳引机单元时的作业步骤的例子。
46.附图标记说明
47.1:升降路
48.2:机械室
49.3:电梯轿厢
50.4:计数配重
51.5:主绳索
52.6:偏导滑轮
53.10:曳引机单元
54.11:曳引机
55.12:牵引轮
56.13:机械梁紧固部
57.14:机械梁(第一机械梁)
58.15:悬吊源部
59.16:副机械梁(第二机械梁)
60.17:接头
61.18:地板
62.19:作业绳索
63.20、20x、20y、20z:安装夹具
64.21:支撑部
65.22:贯通孔
66.23:球滚子
67.24:千斤顶
68.25:钢铁部件
69.26:螺纹轴
70.27:旋钮
71.28:基台
72.29:可伸缩的旋转体
73.30:旋转轴
74.31:支架
75.32:板块
76.33:螺栓
77.34:轴承
78.34a:内圈
79.34b:外圈
80.34c:转动体
81.100:曳引机单元(以往例子)
82.110:悬吊源部(以往例子)
83.120:作业绳索
84.130:地板
85.140:壁面
具体实施方式
86.以下,参照附图,对具备本实施方式的安装夹具的曳引机单元以及其安装方法进行说明。
87.图1是示出本实施方式中的水平方式的电梯的整体结构的图,表示从原始的曳引机单元的形式顺时针旋转90
°
,使曳引机单元相对于机械室的地板垂直,并安装于左侧的壁面的状态。
88.以连接到升降路1的侧方的形式具备机械室2,在其中设置有曳引机单元10。在升降路1内收容有电梯轿厢3与计数配重4,其分别与主绳索5相连。主绳索5通过偏导滑轮6悬挂于构成曳引机单元10的曳引机11的牵引轮12。通过曳引机11的驱动力来旋转牵引轮12,从而主绳索5移动,电梯轿厢3与计数配重4沿着未图示的导轨升降。
89.图2是曳引机单元10的主视图,图3是其右侧视图。曳引机单元10包括曳引机11、机械梁14、副机械梁16以及安装夹具20。
90.曳引机11载置于机械梁14的上表面,将螺栓挿入到设置于曳引机11的下部的机械梁紧固部13并紧固于机械梁14。在此,在将主绳索5悬挂于曳引机11的牵引轮12时,牵引轮12的位置比机械梁14向架设主绳索5的方向、即图3中左方向突出,以使该主绳索5不与机械梁14接触。
91.在安装于壁侧的机械梁的端部、即图2中机械梁14的左侧的端部设置有吊起曳引机单元10时使用的悬吊源部15。此外,在本实施方式中,悬吊源部15由使在起重作业中使用的绳索(以下,称为作业绳索)通过的贯通孔形成,但是也可以取代贯通孔,采用安装构成吊具的挂钩部分的吊环螺栓等。在相当于悬吊源部15的相反侧的机械梁14的另一个端部附近,相对于机械梁14垂直地设置有副机械梁16,使用螺栓连接到机械梁14。曳引机单元10直接连接机械梁14与副机械梁16,并且通过接头17插入其他的螺栓,通过分别紧固机械梁14与接头17以及副机械梁16与接头17,来构成l字型的支撑台。通过接头17,机械梁14与副机械梁16的连接更加牢固。不过,在图2中相对于机械梁14中的、与曳引机11的设置面载置副机械梁16固定设置,但是如将在后面进行说明的图16那样,也可以在机械梁14的端部从横向连接副机械梁16的长度方向的面,以使副机械梁16的端部接触地板18。在l字型的支撑台中,在三处突出地设置有旋转轴30(参照图3),在各自的旋转轴30中隔着l字型的支撑台的两端设置有安装夹具20。
92.在此,使用图4至图7,对安装于机械梁14以及副机械梁16的安装夹具20进行说明。此外,安装于机械梁14的安装夹具20与安装于副机械梁16的安装夹具20是同样的构造,因此此处做为例子对安装于机械梁14的安装夹具20进行说明,省略副机械梁16侧的说明。
93.如图4所示,安装夹具20包括支撑部21、球滚子23以及收纳于在支撑部21下表面侧开口的凹部的千斤顶24。
94.支撑部21具有插入旋转轴30的贯通孔22。
95.球滚子23作为移动机构设置于支撑部21的下部,从支撑部21的底面相比向下面突出。在本实施方式中,作为移动机构使用球滚子23,但是既可以是球体或者环状的旋转体,也可以是车轮等其他形状。
96.千斤顶24作为高度调整机构呈图5所示的机械式的受电弓形状。千斤顶24组合有钢铁部件25,进一步包括螺纹轴26以及基台28。在插入到被组合在一起的钢铁部件25之间的螺纹轴26的一端具有旋钮27,通过向螺纹轴26的周方向扭转旋钮27,螺纹轴26在周方向上正方向(顺时针)或者反方向(逆时针)旋转。能够通过螺纹轴26的旋转机构,来调整千斤顶24的高度。
97.接下来,使用图6与图7,对与千斤顶24的伸缩状态相应的安装夹具20的功能进行说明。根据千斤顶24的位置,安装夹具20发挥的作用不同。
98.图6是安装夹具20的主视图,图7是其侧视图,18表示地板。地板18例如是机械室2的地板等。图6中的(a)、图7中的(a)均表示将千斤顶24收纳于支撑部的状态,图6中的(b)、图7中的(b)表示拉伸千斤顶24比支撑部21,甚至比球滚子23更向地板侧突出的状态。
99.千斤顶24通常收纳于支撑部21,处于千斤顶24的基台28的底面位于比支撑部21的底面靠上部的位置(a)的状态。由于球滚子23与地板接触,因此能够进行与地板18配合的平面移动。
100.当转动旋钮27时能够调整千斤顶24的高度。因此,当向抬高的方向转动旋钮27时,拉伸千斤顶24的高度,基台28朝向地板18侧下降。例如能够手动转动旋钮27。
101.在基台28与地板18接触之后,从接触的部位上推支撑部21,成为浮起球滚子23的设置面(b)的状态。至此由于球滚子23与地板18接触而承受的曳引机单元10的负载移向千斤顶24,千斤顶24承受在重力方向上施加的负载。
102.(安装夹具的变形例)
103.到此为止,对分别对球滚子23与千斤顶24使用不同部件的结构进行了说明,但是安装夹具20也可以是如图8所示那样兼备移动机构与高度调整机构的、具有可伸缩的旋转体29的构造(变形例1)。在这种情况下,在需要平面移动时如图所示设为球滚子23比支撑部21更向下部突出并且球滚子与地板18接触的状态,在不进行平面移动时则收纳在支撑部21内。
104.而且,既可以是如图9所示,不具有球滚子23的构造,且是具备支撑部21与千斤顶24的构造(变形例2),或者,也可以是如图10所示,仅具有支撑部21的构造(变形例3)。在不具有球滚子23的情况下,曳引机单元10难以向旋转后的安装位置平行移动,因此通过旋转曳引机单元10来确定安装位置,即,只要是不需要平行移动的情况则有效。
105.接下来,对每个部件的连接关系进行说明。作为前提,在机械梁14中,预先在具备安装夹具20的位置设置有孔,在该未图示的孔中插入旋转轴30(参照图3),并安装安装夹具20。另一方面,在安装夹具20中,在所述贯通孔22中插入旋转轴30,进行安装。
106.(安装夹具的安装方法)
107.在此,对能够应用于本实施方式的旋转轴30的安装方法进行说明。第一方法是在旋转轴30中,将旋转轴30与机械梁14的连接部固定,并以可转动的方式将旋转轴30与安装夹具20的连接部卡合的方法。第二方法是以可转动的方式将旋转轴30与机械梁14的连接部卡合,并将旋转轴30与安装夹具20的连接部固定的方法。另外,第三方法是以可转动的方式
将旋转轴30与机械梁14的连接部以及旋转轴30与安装夹具20的连接部均卡合的方法。在轴与部件固定的情况下,进行止轴固定即轴固定,在轴与部件卡合的情况下,以能够在周方向上滑动的方式进行轴支撑。如所述第一至第三方法所示,在旋转轴30中,只要机械梁14与安装夹具20的至少一者是轴支撑的,则另一者既可以是轴固定的,也可以是轴支撑的。
108.以下,作为例子,对使用将机械梁14侧固定于旋转轴30,安装夹具20侧以旋转轴30可转动的方式卡合的、第一方法的情况进行说明。
109.首先,对旋转轴30与机械梁14的连接关系进行说明。图11是示出旋转轴30与机械梁14之间的部件等的位置关系的立体图,图12是其剖面图。
110.将旋转轴30插入到设置于机械梁14的孔部,在旋转轴30的外周设置作为圆筒型的钢铁部件的支架31。螺栓33貫通旋转轴30,紧固支架31与旋转轴30。
111.在支架31的更外周设置环状的板块32,通过未图示的螺栓或者焊接等来固定该板块32与支架31以及板块32与机械梁14。
112.由此,轴固定于机械梁14的旋转轴30与机械梁14的旋转动作联动。
113.接下来,对旋转轴30与安装夹具20的连接关系进行说明。图13是示出旋转轴30与安装夹具20之间的部件等的位置关系的立体图,图14是其剖面图。与图11所示的旋转轴30和机械梁14的连接关系同样地,通过螺栓33来紧固支架31与旋转轴30。进一步代替板块32而使用轴承34,通过未图示的螺栓等来安装轴承34的内圈34a与支架31、轴承34的外圈34b与安装夹具20。在轴承34的内圈34a与外圈34b之间,具有多个球状的转动体34c,具备能够根据转动体34c的旋转向旋转轴30的周方向旋转的功能。
114.能够通过将旋转轴30挿入到贯通孔22进行卡合,轴支撑在机械梁14的规定位置,进一步,通过轴承34的作用,支撑部21无需与来自旋转轴30的旋转运动联动,就能够相对于旋转轴30滑动。
115.此外,在本实施方式中,分别在固定于机械梁14的旋转轴30的两端部付近安装有安装夹具20,但是也可以在连接旋转轴30与机械梁14的两处之间设置一个安装夹具20。
116.至此,对固定旋转轴30与机械梁14,卡合旋转轴30与安装夹具20的情况进行了说明,但是在使用其他连接方法的情况下,也能够通过分开使用板块32与轴承34来实现。在第二方法的情况下,在旋转轴30与机械梁14的连接中设置具有轴承34的机构,在旋转轴30与安装夹具20的连接中设置具有板块32的机构。另外,在第三方法的情况下,无论是旋转轴30与机械梁14还是旋转轴30与安装夹具20均分别在连接部位设置具有轴承34的机构。这样,能够通过使用包含轴承34的机构,以可滑动的方式轴支撑该部位。
117.如以上那样构成曳引机单元10。
118.(曳引机单元10的旋转方法)
119.接下来,对旋转曳引机单元10时的步骤进行说明。
120.图15是示出在曳引机单元10中具备安装夹具20的位置x、y、z的图。从正面观察时,分别在机械梁14的左右端部附近的一处设置安装夹具20,在副机械梁16的上端部的一处设置有安装夹具20。不过,,在不是对机械梁14的曳引机11设置面载置副机械梁16而是如图16所示以使副机械梁16的端部与地板18接触的方式从横向连接于机械梁14的端部的情况下,也可以分别在副机械梁的端部附近逐个设置安装夹具20。以下,为了表示基于安装夹具20的各安装位置的功能的不同,将安装在位置x的安装夹具20称为20x,将安装在位置y的安装
夹具20称为20y,将安装在位置z的安装夹具20称为20z。以下,作为安装夹具20的形状,对使用图4、图8、图9、图10中,安装图4所示的安装夹具20的曳引机单元10的情况进行说明。使用所述第一方法进行与旋转轴30的连接。
121.以下,使用图17,对使曳引机单元10旋转90
°
的作业步骤进行说明。
122.曳引机单元10以机械梁14相对于地板18大致平行的方式载置。设置于机械梁14的安装夹具20的下端部与地板18接触,当吊起悬吊源部15时,能够以安装夹具20的下端部与地板18的触点为基点,使曳引机单元10旋转。通过以下所示的步骤i~iv进行该旋转。
123.在步骤i中,首先调整机械梁14的安装夹具20x、20y的旋钮27,抬高至球滚子23不与地板18接触的位置。
124.另外,使用于吊起曳引机单元10的作业绳索19穿过机械梁14的悬吊源部15。作业绳索19包括链块以及吊带绳索。然后,作业人员保持穿过设置于机械室上部、天花板的未图示的悬吊源的作业绳索19,一点一点地缩短作业绳索19的链条部分的长度,开始曳引机单元10的牵引。
125.此时,如步骤ii所示,能够通过牵引作业绳索19,以安装夹具20x为基点将曳引机单元10从原始位置倾斜,悬吊源部15的位置逐渐上升,顺时针旋转。
126.作业人员牵引作业绳索19,通过缩短从天花板到悬吊源的作业绳索19的长度,从步骤ii到步骤iii的状态,副机械梁16与地板18接近平行,机械梁14相对于地板18接近垂直。
127.如步骤iii那样,当曳引机单元10从原始位置大概垂直时,停止牵引,配合作为基点的安装夹具20x的千斤顶24的高度,调整安装于副机械梁16的安装夹具20z的旋钮27,伸出收纳中的千斤顶24。由此,从负载仅施加于安装夹具20x的状态成为施加于安装夹具20x、20z两者的状态,如步骤iv那样曳引机单元10稳定。
128.之后,将安装夹具20x与20z的千斤顶24调整至收纳于支撑部21的位置,使各自的球滚子23与地板18接触。旋转曳引机单元10的一位作业人员之后卸下挂在悬吊源部15上的作业绳索19,根据需要通过球滚子23将曳引机单元10平行移动至正确的安装位置。然后将机械梁14安装于机械室2的内壁面,将副机械梁16安装于机械室2的地板18。此外,根据安装位置,既可以将机械梁14安装在与内壁面分开设置的柱子上,也可以将副机械梁16安装在与地板18分开设置的梁上。
129.如以上那样,通过i~iv的步骤来进行作业,能够使曳引机单元10顺时针旋转,并安装于规定位置。
130.而且,如图18所示,也可以是以下顺序:即,在步骤i的阶段预先抬高以使全部的安装夹具20x、20y、20z分别向下表面侧伸出相同高度,在该状态下旋转使副机械梁16与地板18大致平行之后,使全部的千斤顶24恢复到原始状态。对于千斤顶24伸出的状态,参照图6中的(b)的形状。
131.安装夹具20y以及20z用于在曳引机单元10旋转之前或者旋转之后的平面移动,因此适用具有旋转体的图4、图8的机构,但是安装夹具20x也可以是如图9那样不具有球滚子23的结构、或者如图10那样既不具有千斤顶24也不具有球滚子23的结构。在不具有作为高度调整机构的千斤顶24的情况下,为了使曳引机单元10旋转,设置成安装夹具20的支撑部21的下表面位于机械梁14的底面的下部。
132.此外,在本实施方式中,在曳引机单元的三处安装有安装夹具20,但是至少在位置x设置安装夹具20即可。也可以是在该基础上进一步不具有副机械梁16的形状、也就是图19和图21所示的曳引机单元的形状。在这种情况下,在机械梁14的一端设置悬吊源部15,在另一端设置安装夹具20。
133.图19以及图21是在机械梁14的、悬吊源部15的相反侧的端部附近具有安装夹具20的曳引机单元的构造。另外,图20是对图19的安装夹具20周边进行说明的放大主视图,图22是同样地对图21的安装夹具20周边进行说明的放大主视图。作为安装夹具,图19、图20示出具有支撑部21、球滚子23以及千斤顶24的安装夹具、或者、具有图8所示的支撑部21与可伸缩的旋转体29的安装夹具,图21、图22示出具有图10所示的支撑部21单体、或者图9所示的支撑部21与千斤顶24的安装夹具。在这些形状的情况下,能够以安装夹具20为基点顺时针旋转。
134.对于如图2以及图16所示的组合机械梁14与副机械梁16的结构、以及如图19所示的仅基于机械梁14的结构,可以称为机械梁部件。对于机械梁部件,只要是支撑曳引机11的结构,无需为附图所示的结构,例如,也可以使用多个副机械梁。
135.如以上所述那样,根据本实施方式的具备安装夹具20的曳引机单元10以及其安装方法,在使曳引机单元10顺时针旋转90
°
进行安装的情况下,能够通过在机械梁14与副机械梁16的接合部设置具有高度调整机构与移动机构的安装夹具20,来以千斤顶24为旋转的基点使曳引机单元10顺时针旋转,并且能够根据需要使用球滚子23容易地移动至安装位置。由此,在限定的空间内的安装中,提高了安装时的作业性,并且能够适当地旋转曳引机单元10。
136.另外,在吊起时需要使用的悬吊源部15的所需数量为一个,一位作业人员也能够进行到目前为止至少需要两个人同时进行的曳引机单元10的吊起作业,因此提高了作业性。因此,能够减少涉及安装的作业人员。或者更加确保整体的安全性并且能够推进作业,因此能够实现作业时间缩短。
137.虽然对本发明的几个实施方式进行了说明,但是这些实施方式是作为例子提出的,并非旨在限定发明的保护范围。这些新颖的实施方式能够以其他各种方式实施,在不偏离发明的宗旨的范围内,可以进行各种省略、替换、变更。这些实施方式及其变形包含在发明的保护范围及宗旨中,并且,包含在权利要求书所记载的发明和其等同的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。