1.本发明涉及医疗心脏电生理消融领域,特别是一种可变形态的网格状电极。
背景技术:
2.心房颤动是常见的持续性心律失常,随着年龄增长房颤的发生率不断增加,75岁以上人群可达10%。房颤时心房激动的频率达300~600次/分,不仅比正常人心跳快,而且绝对不整齐,心房失去有效的收缩功能,严重危害人类的健康和影响生活质量。肺静脉之所以成为心房颤动最常见的局部病灶是因为肺静脉肌袖的存在,肺静脉肌袖是与心房肌细胞同源的由左心房伸入到肺静脉的心肌组织。肺静脉的内膜和外膜之间有心肌细胞集落,由心房侧向肺侧呈袖状包绕肺静脉,称为心肌袖,由于形成心肌袖的细胞与心房肌的起源不同,电生理特性也不同,因此会形成异常激动的基质。肺静脉周围的心房肌与肺静脉同样,也包含有af(房颤)的触发灶或者维持af的心律失常基质。
3.目前常用的方式为逐点式点消融肺静脉前庭以形成环形隔离带,该方式手术时间长,给患者及医生带了巨大压力,且经常存在漏点而导致复发,因此亟需设计出一种能一次性快速的消融隔离肺静脉前庭的导管电极。
4.目前已知的电极不能稳定的贴靠肺静脉前庭位置,以及不同尺寸肺静脉尺寸需要使用不同规格的电极,这样会给医生以及患者更大的负担。一次需要设计一种稳定的电极且电极大小可以与调节的电极。
5.目前,常使用具有消融球囊的装置来进行消融治疗,如专利(申请号:cn201910563305.6,发明名称:一种可评估肺静脉封堵情况的标测电极导管)所示的方案,但是,该方式的电极导管无法对肺静脉口部进行很好的贴靠,从而影响消融的效率及效果。
技术实现要素:
6.本发明的目的在于:针对现有技术存在的目前的电极导管无法对肺静脉口部进行很好的贴靠,从而影响消融的效率及效果的问题,提供一种可变形态的可变形态的网格状电极。
7.为了实现上述目的,本发明采用的技术方案为:
8.一种可变形态的网格状电极,包括头端、近端管体和连接于所述头端与所述近端管体之间的第一臂,所述头端和所述近端管体之间设有牵引构件,所述牵引构件能够带动所述头端沿所述牵引构件轴向靠近或远离所述近端管体,所述第一臂为至少两个,在相邻的所述第一臂之间连接有第二臂,所述第二臂上布置有电极,在所述第二臂与所述头端之间的所述第一臂沿牵引构件轴向的投影位于所述电极和所述牵引构件之间。
9.本技术所述的一种可变形态的网格状电极,包括头端、近端管体和连接于所述头端与所述近端管体之间的第一臂,所述头端和所述近端管体之间设有牵引构件,所述牵引构件能够带动所述头端沿所述牵引构件轴向靠近或远离所述近端管体,以实现消融的电极组件使用的基本功能;
10.在所述第二臂与所述头端之间的所述第一臂沿牵引构件轴向的投影位于所述电极和所述牵引构件之间以降低电极与腔道组织结构进行接触贴靠时,第一臂与腔道组织结构相干涉的概率,从而使得电极更易于与腔道组织结构进行稳定地接触贴靠。
11.优选地,所述第一臂包括上臂,所有所述上臂的前端均与所述头端相连接,相邻所述上臂后端通过对应的所述第二臂相连接。
12.优选地,所述第一臂还包括下臂,所有所述下臂的后端均与所述近端管体相连接,相邻所述下臂通过对应的所述第二臂相连接。
13.相邻上臂与电极臂形成三角形状结构,相邻下臂与电极臂形成倒三角形状结构,上述三角形状结构使第一臂和第二臂组成的结构具有支撑,使得第一臂和第二臂组成的结构具有支撑力,当收到外力挤压时均可保持原始状态。
14.优选地,所有所述上臂和所有所述下臂均绕所述牵引构件周向布置,使得第一臂和第二臂组成的结构呈大致的球形网状结构。
15.优选地,所有所述上臂(4)围成半球状,所有所述下臂(5)围成半球状,所有所述上臂(4)围成的半球状结构的半径小于所有所述下臂(5)围成的半球状结构的半径;
16.和/或,
17.所述上臂与所述下臂绕所述牵引构件周向交错布置,所述第二臂(7)位于相邻所述上臂(4)和下臂(5)之间的部分布置有所述电极(3),使得整个球状结构呈三角形组织成的网状结构,其支撑力更好。
18.优选地,相邻两个所述上臂(4)与其之间的所述第二臂(7)部分围成三角形状;
19.和/或,相邻两个所述下臂(5)与其之间的所述第二臂(7)部分围成三角形状,
20.和/或,相邻所示电极之间通过所示下臂与第二臂之间的连接点,或者上臂与第二臂之间的连接点隔开。
21.消融时电极与组织贴靠,连续且在同一平面的电极形成消融带,形成消融隔离带。消融能量为极间发放的射频消融能量或高压脉冲能量,电极之间的能量释放以消融电极贴靠区域的组织.极间消融为两个相邻电极之间与组织形成回路并施加能量,为保证能量的顺利释放及安全性,电极间不能搭接,再加上三角形组织成的网状结构,有效的避免了电极间因外力被压缩的问题。
22.优选地,所有相邻所述上臂之间的夹角相等;
23.和/或,
24.所有相邻所述下臂之间的夹角相等。
25.优选地,所有所述上臂靠近所述头端的一端收纳连接于所述头端的内部,且绕所述牵引构件轴向布置,使得所有所述上臂对称均匀的固定在头端的内部,使得牵引构件能够带动所述头端沿所述牵引构件轴向靠近或远离所述近端管体时,更好地控制头端的方向。
26.优选地,所有所述电极(3)位于同一平面,能够更好的控制消融的效果和消融位置。
27.优选地,所述第一臂为至少三个,所有相邻的所述第一臂之间均连接有所述第二臂。
28.优选地,至少一个所述电极与所述牵引构件相垂直。
29.优选地,所述头端的前端具有圆头形结构,所述圆头形结构由柔形材料构成,具有防损伤目的;
30.所述头端上设置有远端环电极,所述近端管体上设置有近端环电极;
31.所述头端上还设置有磁定位传感器一;
32.所述近端管体上设置有磁定位传感器二。
33.综上所述,由于采用了上述技术方案,本发明的有益效果是:
34.1、本技术所述的一种可变形态的网格状电极,在所述第二臂与所述头端之间的所述第一臂沿牵引构件轴向的投影位于所述电极和所述牵引构件之间,
35.以降低电极与腔道组织结构进行接触贴靠时,第一臂与腔道组织结构相干涉的概率,从而使得电极更易于与腔道组织结构进行稳定地接触贴靠。
36.2、本技术所述的一种可变形态的网格状电极,相邻上臂与电极臂形成三角形状结构,相邻下臂与电极臂形成倒三角形状结构,上述三角形状结构使第一臂和第二臂组成的结构具有支撑,使得第一臂和第二臂组成的结构具有支撑力,当收到外力挤压时均可保持原始状态。
37.3、本技术所述的一种可变形态的网格状电极,第一臂和第二臂组成的结构呈大致的球状结构,所述上臂与所述下臂绕所述牵引构件周向交错布置,使得整个球状结构呈三角形组织成的网状结构,其支撑力更好。
38.4、本技术所述的一种可变形态的网格状电极,消融时电极与组织贴靠,连续且在同一平面的电极形成消融带,形成消融隔离带。消融能量为极间发放的射频消融能量或高压脉冲能量,电极之间的能量释放以消融电极贴靠区域的组织.极间消融为两个相邻电极之间与组织形成回路并施加能量,为保证能量的顺利释放及安全性,电极间不能搭接,再加上三角形组织成的网状结构,有效的避免了电极间因外力被压缩的问题。
39.5、本技术所述的一种可变形态的网格状电极,所有所述上臂靠近所述头端的一端收纳连接于所述头端的内部,且绕所述牵引构件轴向布置,使得所有所述上臂对称均匀的固定在头端的内部,使得牵引构件能够带动所述头端沿所述牵引构件轴向靠近或远离所述近端管体时,更好地控制头端的方向。
附图说明
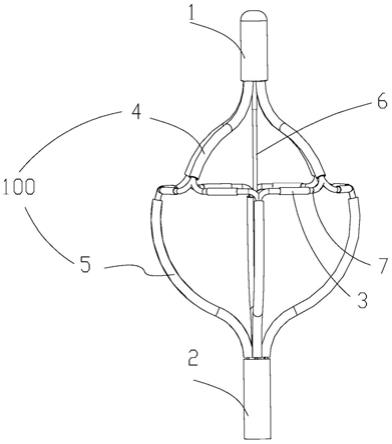
40.图1是本发明所述的一种可变形态的网格状电极的自然状态示意图(一个角度)。
41.图2是本发明所述的一种可变形态的网格状电极的自然状态示意图(另一个角度)。
42.图3是本发明所述的一种可变形态的网格状电极的扁形状态示意图(第一个角度)。
43.图4是本发明所述的一种可变形态的网格状电极的扁形状态示意图(第二个角度)。
44.图5是本发明所述的一种可变形态的网格状电极的扁形状态示意图(俯视角度)。
45.图6是本发明所述的一种可变形态的网格状电极的扁形状态示意图(第三个角度)。
46.图7是本发明所述的一种可变形态的网格状电极的使用状态示意图(自然状态)。
47.图8是本发明所述的一种可变形态的网格状电极的使用状态示意图(扁形状态)。
48.图9是本发明所述的一种可变形态的网格状电极的磁定位传感器布置示意图。
49.图10是本发明所述的一种可变形态的网格状电极在收紧形态下的结构示意图。
50.图11是本发明的附图10中b-b剖面示意图。
51.图12是本发明的附图10中c-c剖面示意图。
52.图13是本发明的附图10中d-d剖面示意图。
53.图标:1-头端;100-第一臂;2-近端管体;3-电极;31-电极一;32-电极二;33-电极三;34-电极四;35-电极五;36-电极六;37-电极七;38-电极八;4-上臂;41-上臂一;42-上臂二;43-上臂三;44-上臂四;5-下臂组件;51-下臂一;52-下臂二;53-下臂三;54-下臂四;6-牵引构件;7-第二臂;8-轴线;9-肺静脉;10-磁定位传感器一;11-磁定位传感器二;12-远端环电极;13-近端环电极。
具体实施方式
54.下面结合附图,对本发明作详细的说明。
55.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
56.实施例1
57.如图1所示,本实施例所述的一种可变形态的网格状电极,包括头端1、近端管体2和连接于所述头端1与所述近端管体2之间的第一臂100,所述头端1和所述近端管体2之间设有牵引构件6,所述牵引构件6能够带动所述头端1沿所述牵引构件6轴向靠近或远离所述近端管体2,其特征在于,所述第一臂100为至少两个,在相邻的所述第一臂100之间连接有第二臂7,所述第二臂7上布置有电极3,在所述第二臂7与所述头端1之间的所述第一臂100沿牵引构件轴向的投影位于所述电极3和所述牵引构件6之间。
58.具体地,所述第一臂100包括上臂4和下臂5,所有所述上臂4的前端均与所述头端1相连接,相邻所述上臂4后端通过对应的所述第二臂7相连接,所有所述下臂5的后端均与所述近端管体2相连接,相邻所述下臂5通过对应的所述第二臂7相连接。
59.相邻上臂与电极臂7形成三角形状结构,相邻下臂与电极臂7形成倒三角形状结构,上述三角形状结构使第一臂100和第二臂7组成的结构具有支撑,使得第一臂100和第二臂7组成的结构具有支撑力,当收到外力挤压时均可保持原始状态。
60.进一步优选地方案,相邻所示电极3之间通过所示下臂5与第二臂7之间的连接点,或者上臂4与第二臂7之间的连接点隔开。
61.消融时电极3与组织贴靠,连续且在同一平面的电极形成消融带,形成消融隔离带。消融能量为极间发放的射频消融能量或高压脉冲能量,电极之间的能量释放以消融电极贴靠区域的组织.极间消融为两个相邻电极之间与组织形成回路并施加能量,为保证能量的顺利释放及安全性,电极间不能搭接,再加上三角形组织成的网状结构,有效的避免了电极间因外力被压缩的问题。
62.更进一步优选地方案,所有相邻所述上臂4之间的夹角相等,所有相邻所述下臂5之间的夹角相等。
63.具体地,所有所述上臂靠近所述头端1的一端收纳连接于所述头端1的内部,且绕所述牵引构件6轴向布置,使得所有所述上臂对称均匀的固定在头端1的内部,使得牵引构件6能够带动所述头端1沿所述牵引构件6轴向靠近或远离所述近端管体2时,更好地控制头端1的方向。
64.更进一步优选地方案,所述第一臂100为至少三个,所有相邻的所述第一臂100之间均连接有所述第二臂7。
65.具体地,所述头端1的前端具有圆头形结构,所述圆头形结构由柔形材料构成,具有防损伤目的。
66.至少一个所述电极3与所述牵引构件6相垂直。
67.如图9所示,所述头端1上设置有远端环电极12,所述近端管体2上设置有近端环电极13,所述头端1上还设置有磁定位传感器一10,所述近端管体2上设置有磁定位传感器二11。
68.上述方案中,第一臂100和第二臂7材质一致,优选为:外部为具有弹性性能的聚氨酯材质构成,内部由超弹性的镍钛合金组成。
69.本实施例的有益效果:本技术所述的一种可变形态的网格状电极,包括头端1、近端管体2和连接于所述头端1与所述近端管体2之间的第一臂100,所述头端1和所述近端管体2之间设有牵引构件6,所述牵引构件6能够带动所述头端1沿所述牵引构件6轴向靠近或远离所述近端管体2,以实现消融的电极组件使用的基本功能;
70.所述第一臂100位于所述第二臂7与所述头端1之间的部分至所述牵引构件6的距离小于所述电极3至所述牵引构件6的距离,以降低电极3与腔道组织结构进行接触贴靠时,第一臂100与腔道组织结构相干涉的概率,从而使得电极3更易于与腔道组织结构进行稳定地接触贴靠。
71.如图10-图13所示在上述方案中,在本实施例的可变形态的网格状电极进入人体时,以收紧的形态进入。
72.实施例2
73.本实施例提供了一种可变形态的网格状电极,与实施例1的不同之处在于:所有所述上臂4和所有所述下臂5均绕所述牵引构件6周向布置,使得第一臂100和第二臂7组成的结构呈大致的球状结构,所述上臂与所述下臂绕所述牵引构件6周向交错布置,使得整个球状结构呈三角形组织成的网状结构,其支撑力更好。
74.如图1所示,所有所述上臂4和所有所述下臂5及第二臂7组成的整体在自然状态下大致呈球状,由头端1、上臂4、下臂5、近端管体2、牵引构件6组成,头端1具有圆头形结构,柔软,具有防损伤目的,其材料优选为聚氨酯,头端1用于收纳及固定上臂4与牵引构件6,头端轴向中心线与牵引构件轴向中心线以及近端管体轴向中心线对齐,上臂4均匀的分布在以轴线8为中心的四周,下臂5固定在近端管体2内,且下臂均匀的分布在轴线8四周。在自然状态下,上臂4形成的半球的半径小于所述第二臂7围成的环形结构的半径,上臂4形成的半球直径小于下臂5形成的半径直径,该方式用于使球状结构更易于与腔道组织结构进行稳定地接触贴靠。
75.所述上臂4和所述下臂5均能够通过牵引构件6沿所述近端管体2的轴向拉伸或收缩,使得本技术的所述可变形态的网格状电极可变形态。
76.如图2所示,电极3分布在上臂4与下臂5之间接合处,电极3呈环状,套设设置在第二臂7上,自然状态下,电极沿球状结构的轴线8线呈圆周布置,所有电极3基本在一个水平上布置,其形成的平面与轴线8垂直。单个电极3宽度为2-5mm,直径0.5-1.2mm,自然状态下电极3形成的平面直径为12-18mm。
77.如图5和6所示,以四个上臂4和四个下臂5交错设置的情况为例,将所有上臂依次编号为:上臂一41,上臂二42,上臂三43和上臂四44;将所有下臂依次编号为:下臂一51,下臂二52,下臂三53和下臂四54;其中上臂一41、上臂二42与两个电极3形成一个三角形状.下臂一51、下臂二52与两个电极3形成一个倒三角形状结构,该三角形状结构有使球状结构具有支撑。自然状态下,球状结构均由上下臂组成的三角形网格结构组成。自然状态下球状结构具有支撑力,当收到外力挤压时均可保持原始状态。
78.消融时电极与组织贴靠,连续且在同一平面的电极形成消融带,形成消融隔离带。消融能量为极间发放的射频消融能量或高压脉冲能量,电极之间的能量释放以消融电极贴靠区域的组织.极间消融为两个相邻电极之间与组织形成回路并施加能量,为保证能量的顺利释放及安全性,电极间不能搭接,这种三角形组织成的空间网状结构,有效的避免了电极间因外力被压缩的问题.
79.上臂4与下臂5以及电极臂均是由具有符合生物相容的绝缘管材制成,内部使用高弹性的合金材料作为骨架进行支撑,支撑结构形状与上臂4、下臂5以及电极臂结构一致,呈轴状,安置在绝缘管内部.
80.如图3、4所示,牵引构件6通过牵引头端使球状结构伸长直径变小,或往回拉直径变大,当直径变大时,用于消融隔离直径更大的腔道结构。当往回拉时,电极3仍呈环形的分布在轴线8为中心线的圆周上,且所有电极在同一平面。收缩时电极组成的环形面直径为20-30mm.且球状结构的形态由立体球状变为扁状。
81.如图5、6所示,上臂4与下臂5由多个,优选为4个(数量可以为4-8个),上臂一41,上臂二42,上臂三43和上臂四44均匀的分布在轴线8的周围。间隔夹角90度.下臂一51,下臂二52,下臂三53和下臂四54均匀的分布在轴线8的周围,间隔夹角90度。上臂与下臂交错的布置,上臂与下臂整体呈大致的球形网格状,臂与臂之间夹角呈45度均匀分布,这样的分布使构成网格状电极更加稳定不易受外力变形,相邻所示电极3之间通过所示下臂5与第二臂7之间的连接点,或者上臂4与第二臂7之间的连接点隔开,即电极3数量为8个,依次为电极一31、电极二32、电极三33、电极四34、电极五35、电极六36、电极七37和电极八38。
82.如图7、8所示,当消融如肺静脉9等腔道结构时,可以根据腔道的直径调节球状结构的形态,当腔道直径较小时,可以使用初始的球进行与腔道结构贴靠消融,当腔道直径较大时,可以变成扁平状增大电极直径以使电极与组织稳定的贴靠进行消融。
83.如图9所示,为使电极形态采集及显示更精确,本发明进一步的揭露电极组件上远端与近端可分别设置远端环电极12、近端环电极13,远端环形电极与近端环形电极分别设置在靠近磁定位传感器一10与磁定位传感器二11位置,且与传感器位置关系固定,通常利用电场进行定位存在不准确问题,只能计算相对的位置关系,但结合磁场后,可准确的确定电极位置关系。由于电极臂上的电极附近无定位传感器,因此需要通过电场进行计算器准确的位置关系,电极组件上均匀的分布多个电极,理论情况下电极扩张后将呈等分360
°
的均分分布在环形圆周上,利用磁定位传感器定位即可计算出,但实际应用中电极会受到组
织干涉影响,会有不同程度变形,因此采用磁场与电场计算结合方式,环形电极(远端环电极12与近端环电极13)以及电极组件上的整列电极中,通过施加的三维电场,可计算出其电极的相对空间位置关系,然后利用环形电极(远端环电极12与近端环电极13)绝对位置(利用与磁传感器的绝对位置关系计算出)对三维电场显示的位置关系进行修正,然后进行准确的电极组件形态显示。
84.如图10-图13所示在上述方案中,在本实施例的可变形态的网格状电极进入人体时,以收紧的形态进入。
85.本实施例的有益效果:
86.1.稳定且连续的环形电极结构更加适合用于腔道结构的消融隔离
87.2.电极形态及直径可以调节用于适应不同直径的腔道结构
88.3.三角形状结构组成的网状电极,增加了电极的稳定性以及防止电极搭接的安全性。
89.4.上臂4的半径小于所述电极部件3围成的环状结构的半径,以降低球状结构与腔道组织结构进行接触贴靠时,上臂4与腔道组织结构相干涉的概率,从而使得球状结构更易于与腔道组织结构进行稳定地接触贴靠。
90.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
