1.本发明是关于一种侦测接近物体的预警系统,尤指一种设置在铁路及/或道路交会处的管制区,以侦测接近物体并提供警示的预警系统。
背景技术:
2.铁路和道路在交会处通常会被列为管制区,如有列车行驶接近时便会发出紧急声响,让车辆、人员尽快离开所述管制区而使之净空。若车辆通过管制区时突遇车辆故障或有障碍物阻挡,管制区旁设置的紧急按钮可供车辆驾驶人或旁人赶紧按下,以警告列车紧急减速及停车。然而,常见车辆的驾驶人因过度紧张而忘记按下紧急按钮,如又无旁人的协助时,列车就无法获得警告而无从减速并停车,进而在所述管制区发生严重的事故,此为紧急按钮须手动操作的问题所在。
3.为解决上述管制区设紧急按钮却未能及时阻止事故的缺陷,现有一种影像侦测系统(例如热影像侦测),是在列车要通过所述管制区时,通过自动影像侦测所述管制区周围是否有车辆、人员逗留,进而发出警告以尽快驱离而达到障碍物自动侦测的效果。然而,现有影像侦测系统除了在视线不佳的情况下有容易误判的情形,并且若管制区无车辆或人员逗留,但在交会的道路上如有朝着所述管制区而来的车辆、人员或猫、狗等接近物体,现有影像侦测系统并无法侦测并提出警示,无法及时阻止列车驶进管制区,而仍发生严重事故,此即本发明所欲解决的主要问题所在。
技术实现要素:
4.为解决上述问题,本发明提供一种侦测接近物体的预警系统,以自动侦测铁路及/或道路交会处的管制区的接近物体,并及时发出警示。
5.本发明的一项实施例提供一种侦测接近物体的预警系统,其设在铁路及/或道路交会处的一管制区,包括有多个侦测单元、一储存单元,以及一运算处理单元。所述多个侦测单元具有两种以上的发射频率,以侦测接近物体沿所述道路驶向所述管制区的一移动路径,并转换为一侦测讯号输出;另外地通过储存单元储存一预警资讯包括一警示路径以及一确认条件,通过确认条件确认所述接近物体持续行驶在警示路径;运算处理单元分别与多个侦测单元及储存单元电性连接,运算处理单元接收侦测讯号以获得所述接近物体实时的移动路径,运算处理单元在判断移动路径在警示路径之中,并且符合所述确认条件时,运算处理单元输出一警示讯号。
6.较佳地,多个侦测单元包括多个水平扫描雷达,多个水平扫描雷达相向设置于所述管制区的对角处,各水平扫描雷达的侦测范围呈水平方向扫描,以侦测所述接近物体的移动路径。
7.较佳地,警示路径包括一警示区以及一缓冲区,警示区以所述水平扫描雷达所能侦测的一预定宽度延伸,缓冲区相对警示区扩张。
8.较佳地,确认条件为一计数预设值,所述接近物体进入缓冲区时开始计数一计数
实际值,如计数实际值已达计数预设值,运算处理单元判断移动路径在警示区之中符合确认条件;另外地计数实际值未达计数预设值,运算处理单元判断移动路径在警示区之中不符合确认条件。
9.较佳地,所述警示区为一直线警示区,其以预定宽度而往同一方向呈直线延伸,缓冲区在直线警示区两旁扩张且距离对称,计数实际值于所述接近物体进入缓冲区时开始计数。
10.较佳地,所述警示区为一曲线警示区,以预定宽度的两端点和所述接近物体位置的一所在点呈三点连线所构成的三角区域,随所述接近物体的移动路径离开曲线警示区,并且符合一远离条件时,改以所述接近物体符合远离条件时的所在点和两端点三点连线所构成的三角区域重新定义曲线警示区,以此类推,直至符合确认条件且运算处理单元输出警示讯号,或者所述接近物体通过所述侦测单元而远离。
11.较佳地,远离条件为所述接近物体如前述往曲线警示区远离时的移动路径先后撷取多个路径点,并由运算处理单元比对多个路径点中的首路径点至末路径点为逐渐远离曲线警示区时,视为符合远离条件;另外地多个路径点中的首路径点至末路径点非逐渐远离曲线警示区时,视为不符合远离条件。
12.较佳地,还包括一曲线警示区,以预定宽度的两端点和所述接近物体位置的一所在点呈三点连线所构成的三角区域,随所述接近物体的移动路径离开曲线警示区,并且符合一远离条件时,改以所述接近物体符合远离条件时的所在点和两端点三点连线所构成的三角区域重新定义曲线警示区,以此类推,直至符合确认条件且运算处理单元输出警示讯号,或者所述接近物体通过所述侦测单元而远离。
13.较佳地,远离条件为所述接近物体如前述往曲线警示区远离时的移动路径先后撷取多个路径点,并由运算处理单元比对多个路径点中的首路径点至末路径点为逐渐远离曲线警示区时,视为符合远离条件;另外地多个路径点中的首路径点至末路径点非逐渐远离曲线警示区时,视为不符合远离条件。
14.较佳地,所述侦测单元于一侦测区域内侦测所述接近物体的一相对距离以获得一碰撞时间,预警资讯包括一碰撞时间预设值,运算处理单元接收侦测讯号以获得所述接近物体实时的碰撞时间,在移动路径于警示区之中并符合确认条件,且判断碰撞时间等于或小于碰撞时间预设值时,运算处理单元输出警示讯号。
15.较佳地,多个侦测单元还包括多个垂直扫描雷达,多个垂直扫描雷达于所述道路相向设置在邻近所述管制区的两旁,各垂直扫描雷达的侦测范围通过垂直方向扫描,以侦测欲进入所述管制区的接近物体。
16.较佳地,多个侦测单元还包括多个遮断扫描雷达,多个遮断扫描雷达于所述铁路设置在邻近所述道路交会处的两旁,以侦测列车驶入及驶出所述管制区。
17.较佳地,所述水平扫描雷达与所述垂直扫描雷达,其雷达操作频率约为79ghz;所述遮断扫描雷达的操作频率约为77ghz。
18.较佳地,所述多个水平扫描雷达的操作频率各不相同。
19.借此,当接近物体被侦测到的移动路径是在警示路径之中,并且符合所述确认条件时,即可确认所述接近物体确实是在警示路径内移动而持续地朝所述管制区而来,运算处理单元可输出警示讯号而进行警告,借以尽快通报即将驶进管制区的列车紧急减速及停
车,以防止接近物体与列车在管制区内发生碰撞,进而避免管制区内有严重事故的发生。
附图说明
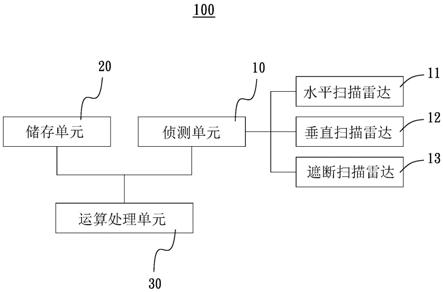
20.图1为本发明实施例于铁路及道路交会的管制区设置预警系统的俯视示意图;图2为本发明实施例于铁路及道路交会的管制区设置预警系统的侧视示意图;图3为本发明的预警系统的方块图;图4为本发明的预警系统在直线模式下的判断流程图;图5为本发明的预警系统在直线模式下侦测接近物体并已达警告状态的示意图,图中仅以一水平扫描雷达向管制区一方的道路侦测为之示意,另外地一水平扫描雷达的侦测方式相同,故未显示于图中;图6为本发明的预警系统在直线模式下侦测接近物体但未达警告状态的示意图,图中仅以一水平扫描雷达向管制区一方的道路侦测为之示意,另外地一水平扫描雷达的侦测方式相同,故未显示于图中;图7为本发明的预警系统在曲线模式下的判断流程图;图8为本发明的预警系统在曲线模式下侦测接近物体但未达警告状态的示意图,图中仅以一水平扫描雷达向管制区一方的道路侦测为之示意,另外地一水平扫描雷达的侦测方式相同,故未显示于图中;图9为本发明的预警系统在曲线模式下侦测接近物体并已达警告状态的示意图,图中仅以一水平扫描雷达向管制区一方的道路侦测为之示意,另外地一水平扫描雷达的侦测方式相同,故未显示于图中。
21.附图标记说明100:预警系统;10:侦测单元;11:水平扫描雷达;12:垂直扫描雷达;13:遮断扫描雷达;20:储存单元;30:运算处理单元;a、b、c、d:路径点;ca:管制区;l:警示路径;p:移动路径;p1、p2:端点;p3、p4:所在点;r1:铁路;r2:道路;t:列车;v:接近物体;w:预定宽度;z1:直线警示区;z2:缓冲区;z3、z4:曲线警示区;z5、z6:缓冲区。
具体实施方式
22.为便于说明本发明于上述发明内容一栏中所表示的中心思想,现以具体实施例表达。实施例中各种不同物件是按适于说明的比例、尺寸、变形量或位移量而描绘,而非按实际元件的比例予以绘制,合先叙明。
23.请参阅图1至图9所示,本发明提供一种侦测接近物体的预警系统100,其设在铁路r1和道路r2交会处的一管制区ca(control area),包括多个侦测单元10、一储存单元20以及一运算处理单元30。为便于说明,以下实施例的管制区ca以铁路r1和道路r2交会时的一矩形区块表示,但是管制区ca不以此述矩形区块为限。在以下实施例中,所述预警系统100侦测的接近物体v可为一移动车辆,但不以此为限,实际上任何的接近物体都可作为侦测标的,例如也可应用于行人、动物(例如猫、狗)等接近物体的侦测。
24.所述多个侦测单元10,包括多个水平扫描雷达11,即各侦测单元10有一个以上的水平扫描雷达11,优选地为两个以上。。多个水平扫描雷达11相向设置于管制区ca的对角处,各水平扫描雷达11的侦测范围呈水平方向扫描,以侦测所述接近物体v的移动路径p。本
实施例中,多个侦测单元10还包括多个垂直扫描雷达12于所述道路r2相向设置,且设置位置是邻近于管制区ca的两旁,各垂直扫描雷达12的侦测范围通过垂直方向扫描,以侦测欲进入管制区ca的接近物体v的高度可能高于水平扫描雷达11所能侦测范围。较佳地,多个侦测单元10还包括多个遮断扫描雷达13于所述铁路r1设置,且设置位置是在邻近道路r2交会处的两旁,以侦测列车t驶入及驶出管制区ca(如图2所示)。其中,水平扫描雷达11与垂直扫描雷达12的雷达操作频率约为79ghz,而遮断扫描雷达13的操作频率约为77ghz。
25.于一较佳实施例中,是以管制区ca在道路r2的双边都小于15米为预警系统100设置环境,此实施例中有两个侦测单元10,即各侦测单元10各有一水平扫描雷达11,两个水平扫描雷达11在管制区ca内相向设置于对角处(图示中都设成45度角),并且两个水平扫描雷达11水平方向扫描范围各呈45度角且不相重叠,此时两个水平扫描雷达11的水平方向扫描范围涵盖管制区ca,并且各水平扫描雷达11的水平方向扫描范围并延伸至所朝向的道路r2。于本实施例中所述水平扫描雷达11的数量以及水平方向扫描范围呈45度角仅为示例,在不同实施状态下,例如管制区ca在道路r2的两边都大于15米,则可在管制区ca内的四角都设水平扫描雷达11(图中未示),且对角同样呈相向设置;此外,水平扫描雷达11可选用不同角度的水平方向扫描范围,例如可选用60~120度角。
26.较佳地,各侦测单元10并有两个垂直扫描雷达12以及两个遮断扫描雷达13。垂直扫描雷达12是在道路r2两旁相向设置,通过垂直方向扫描为侦测范围,以侦测欲进入管制区ca的接近物体v的高度可能高于水平扫描雷达11所能侦测范围,例如具有吊臂的吊车(图中未示),其欲通过管制区ca时,水平扫描雷达11可从其底部侦测到轮胎及其车体,但其吊臂因悬于车头上方且凸出,可能超出水平扫描雷达11可侦测的高度范围,此时通过垂直扫描雷达12进行垂直方向扫描,仍可侦测到吊车及其凸出的吊臂,通过垂直方向辅助侦测接近物体v,达到接近物体v欲进入管制区ca时的全面性侦测;遮断扫描雷达13侦测列车t驶入及驶出管制区ca,此处遮断扫描雷达13主要在代替现有通过计轴器侦测列车t驶入及驶出管制区ca。
27.综上,所述多个侦测单元10具有两种以上的发射频率,以两个水平扫描雷达11为例,如操作频率的范围约为79ghz,可将两个水平扫描雷达11的操作频率进行分频而错开,例如一水平扫描雷达11以79.3ghz为其操作频率,而另外地一水平扫描雷达11则以79.6ghz为其操作频率,以避免两个水平扫描雷达11的雷达波为相同操作频率而相互干扰,简单的来说,各水平扫描雷达11的操作频率各不相同。所述各侦测单元10的两个垂直扫描雷达12及两个遮断扫描雷达13,同样具有可将操作频率分频以避免相互干扰的机制。除此之外,所述分频的做法还可达到系统快速警告的目的。假设在管制区ca所设的水平扫描雷达11有12颗,且12颗水平扫描雷达11以4种操作频段为例,即每操作频段中有3颗水平扫描雷达11的工作频率相同,如每颗水平扫描雷达11的反应时间以50ms为例,为避免水平扫描雷达11间因工作频率相同而造成相互干扰,则将每操作频段的3颗水平扫描雷达11错开扫描时间,且在单一位置进行确认5次(避免扫描讯号遗失,借此提高讯号回馈的信赖度),且不同操作频段的水平扫描雷达11可同时进行扫描的状况下,12颗水平扫描雷达11在150ms即可完成扫描,以使运算处理单元30进行第一次接近物体v的判定。若是12颗水平扫描雷达11不使用前述分频的做法,而是使用分时轮询的做法(即每颗水平扫描雷达11都以耗时50ms的反应时间错开扫描),此时12颗雷达必须耗费600 ms才能采集完成并使运算处理单元30进行第一
次接近物体v的判定,故以分频的做法能更快速反应而提升碰撞预警的效果。
28.据上述实施例,由多个侦测单元10的水平扫描雷达11侦测接近物体v沿所述道路r2驶向管制区ca的一移动路径p,并转换为一侦测讯号输出;储存单元20用以储存一预警资讯,预警资讯包括一警示路径l以及一确认条件,警示路径l是在侦测区域内所设定,所述确认条件在于确认接近物体v持续行驶在警示路径l;运算处理单元30分别与侦测单元10以及储存单元20电性连接,用以接收侦测单元10输出的前述侦测讯号,以获得接近物体v实时移动路径p。
29.所述的确认条件,其于本实施例为一计数预设值,接近物体v进入警示路径l时开始计数一计数实际值,如所述计数实际值已达所述计数预设值,运算处理单元30判断接近物体v的移动路径p在警示路径l之中符合所述确认条件。反之,所述计数实际值未达所述计数预设值,运算处理单元30则判断接近物体v的移动路径p在警示路径l之中不符合所述确认条件。
30.于本实施例中,所述计数预设值为5,所述计数实际值为0至5,计数过程是当接近物体v在警示路径l外时不计数,此时计数实际值等于0;当接近物体v进入警示路径l后开始计数,直到计数实际值等于5时,计数实际值达到计数预设值。计数预设值以及计数实际值可视状况进行调整,并不以上述的实施例为限。
31.本实施例进一步由水平扫描雷达11于侦测区域内侦测接近物体v的一相对距离以获得一碰撞时间(time to collision, ttc),所述碰撞时间是水平扫描雷达11测得所述相对距离后,对所述相对距离进行微分而获得接近物体v的一相对速度,并以所述相对距离除以所述相对速度而获得。于本实施例中,所述预警资讯包括一碰撞时间预设值,此述碰撞时间预设值约为3.5秒。于本实施例中,经侦测接近物体v的移动路径p在警示路径l之中并符合前述确认条件,且判断前述碰撞时间等于或小于前述碰撞时间预设值时,而由运算处理单元30输出一警示讯号。
32.承上,本发明所述运算处理单元30输出所述警示讯号的条件,并不以包括判断前述碰撞时间等于或小于前述碰撞时间预设值为局限,意即侦测接近物体v的移动路径p在警示路径l之中并符合前述确认条件时,运算处理单元30即可输出所述警示讯号,而本实施例中进一步由运算处理单元30判断前述碰撞时间等于或小于前述碰撞时间预设值再发出所述警示讯号,仅为一种实施例,本发明不以此例为限。
33.所述侦测接近物体的预警系统于本实施例中包括一“直线模式”以及一“曲线模式”。于前述的“直线模式”下,警示路径l包括一直线警示区z1以及一缓冲区z2(如图5、6所示),缓冲区z2扩张于直线警示区z1外,直线警示区z1以水平扫描雷达11所能侦测的一预定宽度w延伸,而于本实施例中,直线警示区z1是以预定宽度w而往同一方向呈直线延伸,缓冲区z2则在直线警示区z1两旁扩张且距离对称。
34.如图4所示,为所述“直线模式”下的侦测接近物体的判断流程,并配合图5所示,当接近物体v未进入缓冲区z2时为不计数,表示接近物体v并未进入警示路径l,此时预警系统100处于待命状态;当接近物体v进入缓冲区z2内时,开始启动所述确认条件的运算判断,于本实施例中即计数实际值由0开始往上计数至5,过程中若接近物体v离开缓冲区z2则往下计数至计数实际值为0。当计数实际值由0开始往上计数至5的过程中,接近物体v不论是在缓冲区z2,或从缓冲区z2进入直线警示区z1,而在计数到达5时,因计数实际值达到计数预
设值,运算处理单元30判断接近物体v的移动路径p在警示路径l之中符合所述确认条件。
35.综上所述,若运算处理单元30已判断接近物体v的移动路径p在直线警示区z1内,且接近物体v的移动路径p也符合所述确认条件,于本实施例中进一步由运算处理单元30判断接近物体v所测得的碰撞时间是否等于或小于前述碰撞时间预设值3.5秒,即接近物体v所测得的碰撞时间是否在前述碰撞时间预设值3.5秒内。换言之,当运算处理单元30判断接近物体v所测得的碰撞时间大于前述碰撞时间预设值3.5秒,预警系统100处于不警告的状态;而当运算处理单元30判断接近物体v所测得的碰撞时间等于或小于前述碰撞时间预设值3.5秒时,便判断接近物体v处于危险状态而为危险车辆,此时再输出所述警示讯号以进行警告(例如蜂鸣或闪灯),让列车t及管制区ca旁的车辆、人员能及时获知有危险车辆接近,并尽快处置。
36.再配合图4所示,若运算处理单元30同样判断接近物体v的移动路径p在直线警示区z1内,且接近物体v的移动路径p也符合所述确认条件,但是接近物体v所测得的碰撞时间到达前述碰撞时间预设值3.5秒内之前,即已驶出直线警示区z1外,此时接近物体v所测得的碰撞时间即使到达前述碰撞时间预设值3.5秒内,因接近物体v已驶出直线警示区z1外,对管制区ca并不会造成危险,运算处理单元30不输出所述警示讯号而不进行警告,避免位于管制区ca的人员害怕或恐慌。
37.本实施例中于前述的“曲线模式”下,以预定宽度w的两端点p1、p2和接近物体v位置的一所在点p3呈三点连线所构成的三角区域为曲线警示区z3、z4,并有缓冲区z5、z6在曲线警示区z3、z4两旁扩张(如图8、9所示)。如图7所示,为所述“曲线模式”下的侦测接近物体的判断流程,并配合图8所示,当接近物体v未进入缓冲区z5、z6时不计数,表示接近物体v并未进入警示路径l,此时预警系统100处于待命状态。而当接近物体v进入缓冲区z5内时开始计数,同样计数实际值由0开始往上计数至5,过程中若接近物体v进入曲线警示区z3后再离开,则往下计数至计数实际值为0。
38.如图8、9所示,随接近物体v的移动路径p改变,如接近物体v的移动路径p离开曲线警示区z3,并且符合一远离条件,例如于本实施例中,所述远离条件为接近物体v如前述往曲线警示区z3远离时的移动路径p先后撷取路径点a、b、c、d等四个路径点(如图8所示),并由运算处理单元30比对路径点a、b、c、d中的首路径点a至末路径点d为逐渐远离曲线警示区z3,此时改以接近物体v符合远离条件时的所在点p4和两端点p1、p2三点连线所构成的三角区域重新定义曲线警示区z4,以及缓冲区z6(如图9所示),以此类推,直至符合所述确认条件且运算处理单元30输出所述警示讯号,或者接近物体v通过水平扫描雷达11而远离。反之,路径点a、b、c、d中的首路径点a至末路径点d若非逐渐远离曲线警示区z3时,视为不符合所述远离条件,此时仍维持曲线警示区z3而不会重新定义。
39.当“曲线模式”下,接近物体v进入缓冲区z5或缓冲区z6,计数实际值由0开始往上计数至5,接近物体v从缓冲区z5进入曲线警示区z3,或从缓冲区z6进入曲线警示区z4,而在持续计数到达5时,因计数实际值达到计数预设值,运算处理单元30判断接近物体v的移动路径p在警示路径l之中符合所述确认条件。
40.综上所述,若运算处理单元30已判断接近物体v的移动路径p在曲线警示区z3或曲线警示区z4内,且接近物体v的移动路径p也符合所述确认条件,此时于本实施例中,同样由运算处理单元30判断接近物体v所测得的碰撞时间是否等于或小于前述碰撞时间预设值
3.5秒。换言之,当运算处理单元30判断接近物体v所测得的碰撞时间大于前述碰撞时间预设值3.5秒,预警系统100处于不警告的状态;而当运算处理单元30判断接近物体v所测得的碰撞时间等于或小于前述碰撞时间预设值3.5秒时(如图9所示),便判断接近物体v为危险车辆,此时再输出所述警示讯号以进行警告,让列车t及管制区ca旁的车辆、人员能及时获知有危险车辆接近,并尽快处置。若接近物体v驶出曲线警示区z4外(图中未示),此时接近物体v所测得的碰撞时间即使到达前述碰撞时间预设值3.5秒内,对管制区ca的人员并不会造成危险,运算处理单元30不输出所述警示讯号而不进行警告。
41.以上为分别说明直线模式与曲线模式,实际使用时,可单独以直线模式或曲线模式侦测接近物体v接近,也可直线模式与曲线模式并行,例如同时以直线模式与曲线模式侦测接近物体v接近,或者直线模式与曲线模式以交替的方式侦测接近物体v接近,让侦测接近物体v的模式能更为灵活的运用,以减少误判的情况发生。
42.由上述的说明不难发现本发明的特点,主要在于:1.本发明所提供的侦测接近物体的预警系统100,在于接近物体v的移动路径p是在警示路径l之中,并且在符合所述确认条件的情况下,即可确认所述接近物体v确实是在警示路径l内移动而持续地朝管制区ca而来,以确认接近物体v处于危险状态,而由运算处理单元30输出警示讯号以进行警告,借以尽快通报即将驶进管制区ca的列车t进行刹车处理,防止接近物体v与列车t于管制区ca内发生碰撞,进而达到自动警示且避免管制区ca内发生严重事故的功效。
43.2.本发明所提供的侦测接近物体的预警系统100,除提供水平扫描雷达11以水平方向扫描侦测所述接近物体v的移动路径p,并进一步包括有垂直扫描雷达12于所述道路r2相向设置,而以垂直方向扫描为侦测范围,当接近物体v的高度可能高于水平扫描雷达11所能侦测范围(如前述吊车),其欲进入管制区ca时,仍可被全面测得而不会有所遗漏。本发明进一步设有遮断扫描雷达13以侦测列车t驶入及驶出管制区ca,以解决现有计轴器侦测列车t驶入及驶出管制区ca时可能发生侦测失误的问题,进而提高侦测的精准度。
44.3.本发明所提供的侦测接近物体的预警系统100,进一步以侦测单元10对接近物体v所侦测到的碰撞时间,除前述接近物体v的移动路径p是在警示路径l之中且须符合所述确认条件,并须由运算处理单元30判断是在碰撞时间预设值之内,才会确认接近物体v处于为危险状态,进而输出前述警示讯号以进行警告,借此碰撞时间以辅助判断接近物体v处于危险状态的正确性。
45.4.本发明所提供的侦测接近物体的预警系统100,在接近物体v的移动路径p是从侧边进入时,可在曲线模式下获得良好的侦测及预警效果,且能视接近物体v的移动路径p调整警示区的范围(如前述曲线警示区z3调整至曲线警示区z4),借此进一步能达到精准侦测接近物体v的移动路径p的功效。
46.进一步地,所述水平扫描雷达11侦测接近物体v行驶在缓冲区z2、z5、z6外时有一第一侦测次数,而侦测所述接近物体v行驶在缓冲区z2、z5、z6内时有一第二侦测次数,所述第二侦测次数在相同侦测时间是高于第一侦测次数。举例而言,当接近物体v行驶在缓冲区z2、z5、z6外,侦测单元10测得的一第一侦测次数例如每秒仅50次,属于慢侦测模式;当接近物体v行驶在缓冲区z2、z5、z6内时,水平扫描雷达11可测得的一第二侦测次数例如每秒仅500次,属于快侦测模式。因此,通过接近物体v行驶在缓冲区z2、z5、z6外为慢侦测模式,相
对于快侦测模式能比较省电,借此可使水平扫描雷达11侦测时达到省电的效果。
47.进一步地,接近物体v行驶在缓冲区z2、z5、z6时即可开始输出警示讯号以进行警告,而所述警示讯号运算处理单元30于接近物体v行驶在警示区z1、z3、z4时所输出,相较于运算处理单元30于接近物体v行驶在缓冲区z2、z5、z6时所输出的警示程度为高。换言之,接近物体v行驶在缓冲区z2、z5、z6而开始输出警示讯号以进行警告时的警示程度较低(例如蜂鸣器声响较小或警示灯闪动频率较低),提供人员可在接近物体v行驶在缓冲区z2、z5、z6时即可发觉,且接近物体v若行驶至警示区z1、z3、z4时,警示程度则提高(例如蜂鸣器声响较大或警示灯闪动频率较高),以协助人员获知情况危急而尽快闪避。
48.以上所举实施例仅用以说明本发明而已,非用以限制本发明的范围。举凡不违本发明精神所从事的种种修改或变化,都属本发明权利要求保护的范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。