技术特征:
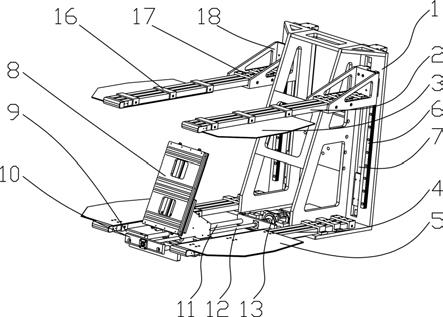
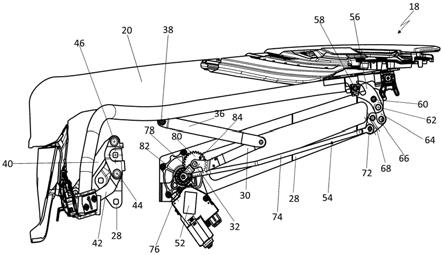
1.一种纸板抓取机械手,其特征是:它包括爪座(1),爪座(1)用于与关节机械臂(200)固定连接,爪座(1)上设有可相对移动的上臂(2)和下臂(4),在上臂(2)和下臂(4)之间还设有沿上臂(2)和下臂(4)方向往复运动的推抬板装置(8)。2.根据权利要求1所述的一种纸板抓取机械手,其特征是:所述的上臂(2)和\或下臂(4)与爪座(1)滑动连接,在爪座(1)上设有臂升降杆(14),用于驱动上臂(2)和\或下臂(4)沿着爪座(1)滑动;所述的臂升降杆(14)采用丝杆螺母机构或气缸。3.根据权利要求1所述的一种纸板抓取机械手,其特征是:所述的下臂(4)与爪座(1)固定连接,爪座(1)上设有大致沿竖直方向的上臂滑轨(6),还设有大致沿竖直方向的滑槽(7),在爪座(1)的背面设有臂升降杆(14),上臂(2)的一端穿过滑槽(7)与臂升降杆(14)固定连接,上臂(2)还与上臂滑轨(6)滑动连接,并由臂升降杆(14)驱动沿着上臂滑轨(6)滑动;所述的臂升降杆(14)采用丝杆螺母机构或气缸。4.根据权利要求1所述的一种纸板抓取机械手,其特征是:上臂(2)和下臂分别为独立的两部分,位于爪座(1)的两侧,上臂(2)和下臂的自由端分别设有大致平行的上夹板(3)和下夹板(5);上夹板(3)和下夹板(5)位于上臂(2)与下臂相对的一侧,以使上夹板(3)和下夹板(5)与被夹持物料接触。5.根据权利要求4所述的一种纸板抓取机械手,其特征是:所述的上夹板(3)和下夹板(5)采用碳纤维板。6.根据权利要求4所述的一种纸板抓取机械手,其特征是:所述的上臂(2)和下臂采用多个并列布置的管件,管件的一端通过与抱箍(17)与爪座(1)或滑座(18)固定连接;各个管件之间通过横向连接件(16)固定连接。7.根据权利要求1所述的一种纸板抓取机械手,其特征是:沿着下臂(4)设有推抬导杆(11)和推抬螺杆(12),推抬电机(13)固设在爪座(1)上,推抬电机(13)的输出轴与推抬螺杆(12)固定连接,并驱动推抬螺杆(12)旋转,推抬板滑座(83)与推抬导杆(11)滑动连接,推抬板滑座(83)与推抬螺杆(12)螺纹连接;推抬板(81)与推抬板滑座(83)滑动连接,推抬升降杆(82)与推抬板滑座(83)固定连接,推抬升降杆(82)还与推抬板(81)连接,以驱动推抬板(81)升降。8.根据权利要求7所述的一种纸板抓取机械手,其特征是:所述的上臂(2)和下臂采用双臂结构,两臂之间设有空隙;在两个下臂(4)的端头各固设有一个相向延伸的端头座板(9),两根推抬导杆(11)穿过端头座板(9)与连接板(10)连接,连接板(10)与推抬螺杆(12)端头通过轴承连接。9.根据权利要求7所述的一种纸板抓取机械手,其特征是:所述的推抬板(81)为倾斜布置,推抬板(81)底部靠近下臂(4)的自由端,推抬板(81)顶部靠近爪座(1);推抬板(81)外侧表面的运动方向与竖直面的夹角(a)为5
°
~25
°
;推抬板(81)的外侧表面设有水平齿;在推抬板(81)的外侧表面的底部还设有突出表面的抬起齿。10.一种采用权利要求1~9任一项所述的纸板抓取机械手的机械臂,其特征是:关节机
械臂(200)的自由端与爪座(1)固定连接。
技术总结
本发明提供一种纸板抓取机械手及机械臂,它包括爪座,爪座用于与关节机械臂固定连接,爪座上设有可相对移动的上臂和下臂,在上臂和下臂之间还设有沿上臂和下臂方向往复运动的推抬板装置。一种采用上述的纸板抓取机械手的机械臂,关节机械臂的自由端与爪座固定连接。本发明能够用于机械臂从成堆的工件中,无损的取出一定厚度的堆叠工件,并转运至下一工序。设置的推抬板装置能够在夹板插入前,先将工件抬起部分,形成较大的缝隙,避免在夹板插入过程中损坏纸张工件。并能够用于推送工件。优选的方案中,采用管件结构的上臂和下臂,配合碳纤维板材质的夹板,能够大幅减轻机械手的自重,从而提升每次转运工件的重量。从而提升每次转运工件的重量。从而提升每次转运工件的重量。
技术研发人员:刘辉 尹传胜 魏闪
受保护的技术使用者:武汉深海弈智科技有限公司
技术研发日:2020.08.19
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。