1.本发明涉及一种用于传感器设备的微机械构件。本发明还涉及一种用于传感器设备的微机械构件的制造方法。
背景技术:
2.图1示出常规加速度传感器的示意图,该加速度传感器作为内部现有技术对于申请人是已知的。
3.在图1中示意性示出的常规加速度传感器具有两个震动质量(seismische masse)10,这两个震动质量分别通过各两个弹簧装置12如此连接在保持件14上,使得两个震动质量10能够置于沿轴线16定向的振荡运动中。两个震动质量10如此“依次”布置,使得轴线16与两个震动质量10中的每个在中间相交。然而,两个震动质量10之间的间距d选择得如此之大,使得即使在这两个震动质量沿轴线16的振荡运动的情况下,也不发生这两个震动质量10之间的机械接触。
4.在震动质量10上构造执行器电极18,这些执行器电极配属有固定在保持件14上的定子电极20。具有沿轴线16定向的、不等于零的加速度分量的加速度对图1的常规加速度传感器的影响导致两个震动质量10从其在图1中示出的静止位置偏离,由此,执行器电极18中的每个与至少一个分别配属的定子电极20之间的相应中间间距发生改变。在使用构造在保持件14上的印制导线22的情况下,能够探测执行器电极18与所配属的定子电极20之间的相应中间间距的变化,以用于证明或测量沿轴线16定向的加速度分量。
5.此外,图1的常规加速度传感器针对两个震动质量中的每个具有各一个第一停止结构24和各一个第二停止结构26。第一停止结构24如此固定在保持件14上,使得分别配属的震动质量10在其从其静止位置在第一方向上沿轴线16移位(verstellung)第一极限路程时机械地接触所配属的第一停止结构24。相应地,第二停止结构26也如此固定在保持件14上,使得分别配属的震动质量10在其从其静止位置在与第一方向相反定向的第二方向上沿轴线16移位第二极限路程之后机械地接触所配属的第二停止结构26。
技术实现要素:
6.本发明提出一种用于传感器设备的微机械构件,该微机械构件具有第一震动质量,该第一震动质量借助至少一个第一弹簧装置如此连接在该微机械构件的保持件上,使得该第一震动质量能够从其第一静止位置在至少一个第一弹簧装置变形的情况下至少沿第一轴线相对于保持件移位,其中,从其第一静止位置在第一方向上沿第一轴线移位第一极限路程的第一震动质量机械地接触保持件的第一停止结构,并且该微机械构件具有第二震动质量,该第二震动质量借助至少一个第二弹簧装置如此连接在保持件上,使得该第二震动质量能够从其第二静止位置在至少一个第二弹簧装置变形的情况下至少沿第二轴线相对于保持件移位,其中,第二轴线平行于第一轴线或位于第一轴线上,其中,第一震动质量和第二震动质量如此相对于彼此地布置,使得从其第二静止位置在与第一方向相反定向
的第二方向上沿第二轴线移位的第二震动质量的第二止挡面机械地接触附着(anhaftend)在第一停止结构上的第一震动质量的第一止挡面。
7.本发明还涉及一种用于传感器设备的微机械构件的制造方法,该制造方法具有以下步骤:借助至少一个第一弹簧装置将第一震动质量如此连接在微机械构件的保持件上,使得第一震动质量能够从其第一静止位置在至少一个第一弹簧装置变形的情况下至少沿第一轴线相对于保持件移位;借助至少一个第二弹簧装置将第二震动质量如此连接在保持件上,使得第二震动质量能够从其第二静止位置在至少一个第二弹簧装置变形的情况下至少沿第二轴线相对于保持件移位,其中,第二轴线平行于第一轴线或位于第一轴线上;以及如此构造保持件的第一停止结构,使得从其第一静止位置在第一方向上沿第一轴线移位第一极限路程的第一震动质量机械地接触保持件的第一停止结构;其中,第一震动质量和第二震动质量如此相对于彼此地布置,使得从其第二静止位置在与第一方向相反定向的第二方向上沿第二轴线移位的第二震动质量的第二止挡面机械地接触附着在第一停止结构上的第一震动质量的第一止挡面。
8.本发明的优点
9.本发明提出有利的可能性,以便防止分别配备有两个震动质量的微机械构件的至少第一震动质量不期望地附着或粘接(英语:stiction)在微机械构件的保持件的至少一个配属给第一震动质量的第一停止结构。本发明因此为提高这类微机械构件的机械稳健性或耐过载性做出贡献。借助本发明实现的微机械构件因此也能够经受具有增加的稳健性要求的负载特性,而不(显著)损害使用相应微机械构件的传感器设备的测量精度或测量可靠性。例如,配备有根据本发明的微机械构件的传感器设备可以有利地用作平板电脑或智能手机的输入笔中的惯性传感器,尽管在这类使用中,根据本发明的微机械构件偶尔经受硬冲击。
10.此外,根据本发明的微机械构件也可以构造得相对较小,而根据本发明的微机械构件的微型化不(显著)损害其相对于冲击负载的稳健性。借助根据本发明的微机械构件的微型化能够节省制造成本,其中,微型化的微机械构件的相对较好的机械稳健性/耐过载性也导致维修成本或更换成本的节省。
11.在微机械构件的一种有利的实施方式中,从其第一静止位置在第二方向上沿第一轴线移位第二极限路程的第一震动质量机械地接触保持件的第二停止结构,其中,第一震动质量和第二震动质量如此相对于彼此地布置,使得从其第二静止位置在第一方向上沿第二轴线移位的第二震动质量的第四止挡面机械地接触附着在第二停止结构上的第一震动质量的第三止挡面。如基于以下描述变得明确的那样,借助第四止挡面与第三止挡面的机械接触能够如此将冲量(impuls)从第二震动质量传递到附着在第二停止结构上的第一震动质量上,使得实现第一震动质量从第二止挡结构脱离。
12.优选地,第一震动质量和第二震动质量如此相对于彼此地布置,使得位于其第一静止位置中的第一震动质量的第一止挡面至位于其第二静止位置中的第二震动质量的第二止挡面的第一间距大于第一极限路程并小于等于第一极限路程的两倍,和/或位于其第一静止位置中的第一震动质量的第三止挡面至位于其第二静止位置中的第二震动质量的第四止挡面的第二间距大于第二极限路程并小于等于第二极限路程的两倍。借助第一间距
与第一极限路程之间的或第二间距与第二极限路程之间的这类大小关系,能够可靠地确保,第一止挡面与第二止挡面的机械接触或第三止挡面与第四止挡面的机械接触总是在第一震动质量不期望地附着/粘接在第一止挡结构上或第二止挡结构上时发生。
13.在微机械构件的另一有利的实施方式中,第一止挡面构造在第一震动质量的第一止挡结构上,第二止挡面构造在第二震动质量的第二止挡结构上,第三止挡面构造在第一震动质量的第三止挡结构上,和/或第四止挡面构造在第二震动质量的第四止挡结构上。如基于以下附图描述变得明确的那样,第一止挡结构、第二止挡结构、第三止挡结构和/或第四止挡结构能够以相对较大的设计自由度进行构造。
14.例如,第一震动质量的第一止挡结构、第二震动质量的第二止挡结构、第一震动质量的第三止挡结构和/或第二震动质量的第四止挡结构可以分别构造为弹动的(federnd)止挡结构。在这种情况下,机械接触导致相应止挡结构的轻微偏离并且因此导致附加的恢复力。同时,借助相应止挡结构的挠性(nachgiebigkeit)确保构造于其上的止挡面更少地受到损坏。然而,替代地,第一震动质量的第一止挡结构、第二震动质量的第二止挡结构、第一震动质量的第三止挡结构和/或第二震动质量的第四止挡结构也可以分别构造为固定的止挡结构。
15.在微机械构件的一种特别有利的实施方式中,第一震动质量的第一止挡结构至少部分地伸入到第二震动质量的第一侧向凹槽中,该第一侧向凹槽朝向第一轴线开放,第二震动质量的第二止挡结构至少部分地伸入到第一震动质量的第二侧向凹槽中,该第二侧向凹槽朝向第二轴线开放,第一震动质量的第三止挡结构至少部分地伸入到第二震动质量的第三侧向凹槽中,该第三侧向凹槽朝向第一轴线开放,和/或第二震动质量的第四止挡结构至少部分地伸入到第一震动质量的第四侧向凹槽中,该第四侧向凹槽朝向第二轴线开放。因此在优化止挡结构的位置时得出大的设计自由度。
16.此外,用于传感器设备的微机械构件的对应制造方法的实施也实现前述的优点,其中,该制造方法能够根据微机械构件的上述实施方式得到扩展。
附图说明
17.以下基于附图阐述本发明的其他特征和优点。附图示出:
18.图1示出常规加速度传感器的示意图;
19.图2a和图2b示出微机械构件的第一实施方式的示意图;
20.图3a和图3b示出微机械构件的第二实施方式的示意图;
21.图4示出微机械构件的第三实施方式的示意图;和
22.图5示出用于阐述用于微机械构件的制造方法的实施方式的流程图。
具体实施方式
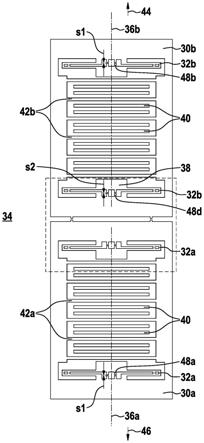
23.图2a和图2b示出微机械构件的第一实施方式的示意图。
24.在图2a中示意性示出的微机械构件具有第一震动质量30a,该第一震动质量借助至少一个第一弹簧装置32a如此连接在微机械构件的保持件34上,使得第一震动质量30a能够从其第一静止位置在至少一个第一弹簧装置32a变形的情况下至少沿第一轴线36a相对于保持件34移位。此外,该微机械构件具有第二震动质量30b,该第二震动质量借助至少一
个第二弹簧装置32b如此连接在保持件34上,使得第二震动质量30b能够从其第二静止位置在至少一个第二弹簧装置32b变形的情况下至少沿第二轴线36b相对于保持件34移位。仅示例性地,在图2a和图2b的微机械构件中,第二轴线36b位于第一轴线36a上。两个震动质量30a和30b因此沿第一/第二轴线36a和36b“依次”布置。替代地,第二轴线36b也可以平行于第一轴线36a。
25.在图2a和图2b的示例中,仅示意性示出保持件34。例如,示出每个震动质量30a和30b的各两个支承柱38以及每个震动质量30a和30b的多个定子电极40。支承柱38和定子电极40分别构造为保持件34的固定/不可移位的部件。震动质量30a和30b中的每个通过各一个第一/第二弹簧装置32a或32b连接在配属于其的两个支承柱38上。此外,每个震动质量30a和30b分别构造有执行器电极42a或42b,这些执行器电极能够以下述方式与配属于其的定子电极40共同起作用。然而,在此明确指出,具有支承柱38和/或定子电极40的保持件34的构造仅应示例性地解读。
26.第一震动质量30a能够从其在图2a中示出的第一静止位置沿第一轴线36a不仅在第一方向44上而且在与第一方向44相反定向的第二方向46上移位。第二震动质量30b也能够从其在图2a中示出的第二静止位置沿第二轴线36b不仅在第一方向44上而且在第二方向46上移位。保持件34还至少针对第一震动质量30a包括第一停止结构48a,该第一停止结构如此相对于第一震动质量30a布置,使得从其第一静止位置在第一方向44行沿第一轴线36a移位第一极限路程s1的第一震动质量30a机械地接触第一停止结构48a。第一震动质量30a从其第一静止位置沿第一轴线36a在第一方向44上的移位运动因此借助第一停止结构48a而(通常)限于第一极限路程s1。作为有利的补充方案,保持件34附加地也针对第二震动质量30b具有第二停止结构48b,该第二停止结构如此相对于第二震动质量30b布置,使得从其第二静止位置在第二方向46上沿第二轴线36b移位第一极限路程s1的第二震动质量30b机械地接触第二停止结构48b。对此,第二震动质量30b从其第二静止位置在第二方向46上沿第二轴线36b的移位运动也可以借助第二停止结构48b而(通常)限于第一极限路程s1。第一停止结构48a和/或第二停止结构48b优选地如此布置或构造在保持件14上,使得第一停止结构48a和/或第二停止结构48b仅能借助损坏保持件14来移位。
27.图2b示出图2a的放大的局部视图。如在图2b中可以看出的那样,第一震动质量30a和第二震动质量30b如此相对于彼此地布置,使得第一震动质量30a的第一止挡面50a和第二震动质量30b的第二止挡面50b能够彼此机械接触。特别地,震动质量30a和30b如此相对于彼此地布置和定向,使得从其第二静止位置在第二方向46上沿第二轴线36b移位的第二震动质量30b的第二止挡面50b机械地接触附着在其第一停止结构48a上的第一震动质量30a的第一止挡面50a。借助第一止挡面50a与第二止挡面50b之间的机械接触,能够如此实现从第二震动质量30b到第一震动质量30a上的冲量传递,使得附着在其第一停止结构48a上的第一震动质量30a再次从第一停止结构48a脱离/松脱(losschlagen)。因此能够快速地再次消除第一震动质量30a在其第一止挡结构48a上的不期望的附着或粘接。因此,在图2b中示意性示出的、震动质量30a和30b相对于彼此的有利布置改善微机械构件的机械稳健性或耐过载性。
28.此外,由于震动质量30a和30b相对于彼此的有利布置,从其第一静止位置在第一方向44上沿第一轴线36a移位的第一震动质量30a的第一止挡面50a如此机械地接触附着在
其第二停止结构48b上的第二震动质量30b的第二止挡面50b,使得进行从第一震动质量30a到第二震动质量30b上的冲量传递。因此,也能够快速地再次消除第二震动质量30b在其第二止挡结构48b上的不期望的附着或粘接。这对微机械构件的机械稳健性或耐过载性的附加改善做出贡献。即使在出现机械负载(即非静态加速度)的情况下,当震动质量30a或30b中的一个与配属于其的第一/第二停止结构48a或48b发生机械接触时,相应的震动质量30a或30b在配属于其的第一/第二停止结构48a或48b上的粘接状态也快速地再次取消,由此,微机械构件再次转换为其完全功能能力状态。由于在发生动态负载时,两个震动质量30a和30b同时附着在其所配属的第一/第二停止结构48a和48b上是极不可能的,因此,在震动质量30a或30b的粘接状态下,另一震动质量30a或30b总是仍然能够实现附着的震动质量30a或30b的脱离/松脱。
29.例如,当位于其第一静止位置中的第一震动质量30a的第一止挡面50a至位于其第二静止位置中的第二震动质量30b的第二止挡面50b的第一间距d1大于第一极限路程s1并小于等于第一极限路程s1的两倍时,实现第一震动质量30a和第二震动质量30b相对于彼此的有利布置。这保证两个震动质量30a和30b在微机械构件的运行期间的有利可移位性,其中,通常仅在两个震动质量30a和30b中的一个附着在配属于其的停止结构48a或48b上时,才出现震动质量30a和30b在其止挡面50a和50b上的机械接触。
30.在图2a和图2b的微机械构件中,第一止挡面50a构造在第一震动质量30a的第一止挡结构52a上,并且第二止挡面50b构造在第二震动质量30b的第二止挡结构52b上。止挡结构52a和52b尤其可以构造为凸块止挡或凸块止挡结构。此外,第一震动质量30a和第二震动质量30b也可以构造有多个第一/第二止挡面50a和50b或构造有多个第一/第二止挡结构52a和52b。
31.作为可选的扩展方案,图2a和图2b的微机械构件还具有第三停止结构48c,该第三停止结构如此布置/构造在保持件34上,使得从其第一静止位置在第二方向46上沿第一轴线36a移位第二极限路程s2的第一震动质量30a机械地接触保持件34的第三停止结构48c。相应地,第四停止结构48d如此布置/构造在保持件34上,使得从其第二静止位置在第一方向44上沿第二轴线36b移位第二极限路程s2的第二震动质量30b机械地接触第四停止结构48c。第一震动质量30a从其第一静止位置沿第一轴线36a在第二方向46上的移位运动和/或第二震动质量30b从其第二静止位置沿第二轴线36b在第一方向44上的移位运动因此借助第三/第四停止结构48c和48d而(通常)限于第二极限路程s2。第二极限路程s2可以等于或不等于第一极限路程s1。第三停止结构48c和/或第四停止结构48d优选地如此布置或构造在保持件14上,使得第三停止结构48c和/或第四停止结构48d仅能够借助损坏保持件14来移位。仅示例性地,在图2a和图2b的微机械构件中,停止结构48a至48d构造在支承柱上。
32.图3a和图3b示出微机械构件的第二实施方式的示意图。
33.作为前述实施方式的扩展方案,在图3a和图3b的微机械构件中,第一震动质量30a的第三止挡面50c和第二震动质量30b的第四止挡面50d也能够彼此机械接触。特别地,第一震动质量30a和第二震动质量30b如此相对于彼此地布置,并且第一震动质量30a的第三止挡面50c和第二震动质量30b的第四止挡面50d如此构造,使得从其第二静止位置在第一方向44上沿第二轴线36b移位的第二震动质量30b的第四止挡面50d机械地接触附着在第三停止结构48c上的第一震动质量30a的第三止挡面50c。借助第二震动质量30b的第四止挡面
50d与第一震动质量30a的第三止挡面50c的机械接触,能够如此将冲量从第二震动质量30b传递到附着在第三停止结构48c上的第一震动质量30a上,使得实现第一震动质量30a从第三停止结构48c脱离。有利地,附加地,从其第一静止位置在第二方向46上沿第一轴线36a移位的第一震动质量30a的第三止挡面能够如此机械地触及附着在其第四停止结构48d上的第二震动质量30b的第四止挡面50d,使得借助从第一震动质量30a到第二震动质量30b上的冲量传递,也能够快速地再次消除第二震动质量30b在其第四停止结构48d上的不期望的附着或粘接。第一震动质量30a的第三止挡面50c和第二震动质量30b的第四止挡面50d的构造因此实现微机械构件的机械稳健性或耐过载性的附加改善。
34.优选地,位于其第一静止位置的第一震动质量30a的第三止挡面50c至位于其第二静止位置的第二震动质量30b的第四止挡面50d的第二间距d2大于第二极限路程s2并小于等于第二极限路程s2的两倍。这也保证两个震动质量30a和30b在微机械构件的运行期间的有利可移性,从而震动质量30a和30b在其止挡面50c和50d上的机械接触通常仅在两个震动质量30a和30b中的一个附着在配属于其的停止结构48c或48d上时出现。
35.优选地,第三止挡面50c构造在第一震动质量30a的第三止挡结构52c上,并且第四止挡面50d构造在第二震动质量30b的第四止挡结构52d上。在这种情况下,第三止挡结构52c和第四止挡结构52d可以如此成形,使得第一震动质量30a的第三止挡结构52d至少部分地伸入到第二震动质量30b的侧向凹槽54c中,该凹槽朝向第一轴线36a开放,并且第二震动质量30b的第四止挡结构52d至少部分地伸入到第一震动质量30a的侧向凹槽54d中,该凹槽朝向第二轴线36b开放。如在图3b中可以看出的那样,第一震动质量30a的第三止挡面50c朝向第二震动质量30b的第四止挡面50d的定向可以与第一震动质量30a的第一止挡面50a朝向第二震动质量30b的第二止挡面50b的定向相反地定向。这也可以解释为第三止挡结构52c和第四止挡结构52d的“相互勾连构造(ineinander gehakte ausbildung)”。因此,第一震动质量30a远离第二震动质量30b的运动也能够实现第二震动质量30b从第四停止结构48d脱离,而第二震动质量30b远离第一震动质量30a的运动能够实现第一震动质量30a从第三停止结构48c脱离。
36.止挡结构52c和52d也可以构造为凸块止挡或凸块止挡结构。此外,第一震动质量30a和第二震动质量30b也可以构造有多个第三/第四止挡面50c和50d或构造有多个第三/第四止挡结构52c和52d。
37.关于图3a和图3b的微机械构件的其他特征及其优点,参考图2a和2b的描述。
38.图4示出微机械构件的第三实施方式的示意图。
39.在图4中示意性示出的微机械构件中,第二轴线36b平行于第一轴线36a延伸。震动质量30a和30b因此“并排”布置。此外,第一震动质量30a的第一止挡结构52a也至少部分地伸入到第二震动质量30b的侧向凹槽54a中,该凹槽朝向第一轴线36a开放,而第二震动质量30b的第二止挡结构52b至少部分地伸入到第一震动质量30a的侧向凹槽54b中,该凹槽朝向第二轴线36b开放。因此,在图4的微机械构件中,不仅止挡结构52a和52b构造为“彼此接合止挡结构(ineinander greifende anschlagstrukturen)”,而且止挡结构52c和52d构造为“彼此接合止挡结构”。
40.关于图4的微机械构件的其他特征及其优点,参考图2a、图2b、图3a和图3b的描述。
41.在所有上述微机械构件中,止挡面50a至50d或止挡结构52a至52d对提高相应微机
械构件相对于以下情况的稳健性做出贡献:该微机械构件的震动质量30a或30b不期望地粘接在相邻的停止结构48a至48d上。在上述微机械构件中,止挡结构52a至52d如此构造,使得这些止挡结构既不显著影响相应微机械构件的或使用相应微机械构件的传感器设备的静态行为(偏移灵敏度),也不显著影响相应微机械构件的或使用相应微机械构件的传感器设备的动态行为(频率、阻尼)。此外,上述微机械构件具有良好的紧凑性,因此归因于止挡结构52a至52d的附加空间需求是可忽略的。在图2至图4中,止挡结构52a至52d示为固定/不可弯曲的止挡结构52a至52d。替代地,第一震动质量30a的第一止挡结构52a、第二震动质量30b的第二止挡结构52b、第一震动质量30a的第三止挡结构52c和/或第二震动质量30b的第四止挡结构52d可以分别构造为弹动的止挡结构。还应指出,在图2至图4中示出的止挡结构52a至52d的作为凸块止挡的构造仅应示例性地解读。
42.上述微机械构件仅具有两个震动质量30a和30b。然而,应当指出,这类微机械构件也可以构造有至少三个这类震动质量,其中,在其至少三个震动质量上可以构造有上述止挡面50a至50d或止挡结构52a至52d。
43.每个上述微机械构件都可以用作传感器设备(的至少部分)。特别地,这类微机械构件可以用作惯性传感器(的至少部分),以用于证明或测量至少一个沿其轴线36a和36b定向的加速度分量。沿轴线36a和36b定向的非零加速度分量导致至少震动质量30a和30b从其静止位置偏离,由此,执行器电极42a和42b中的每个与至少一个分别配属的定子电极40之间的相应中间间距发生改变。在使用构造在保持件34上的(未绘出的)印制导线的情况下,能够通过截取电压变化或求取电容变化(例如由外部分析处理电路)探测相应中间间距的变化。特别地,在此可以分析处理差分信号,因为在执行器电极42a和42b以及定子电极40的适合的布置下,至少震动质量30a和30b的从其静止位置沿轴线36a和36b的偏离触发相应中间间距的正和负的变化。作为具有至少三个震动质量的扩展方案,微机械构件也能够用于二维加速度传感器。
44.图5示出用于阐述用于微机械构件的制造方法的实施方式的流程图。
45.在方法步骤st1中,如此借助至少一个第一弹簧装置将第一震动质量连接在微机械构件的保持件上,使得第一震动质量能够从其第一静止位置在至少一个第一弹簧装置变形的情况下至少沿第一轴线相对于保持件移位。相应地,作为方法步骤st2,如此借助至少一个第二弹簧装置将第二震动质量连接在保持件上,使得第二震动质量能够从其第二静止位置在至少一个第二弹簧装置变形的情况下至少沿第二轴线相对于保持件移位,其中,第二轴线平行于第一轴线或位于第一轴线上。在另一方法步骤st3中,如此构造保持件的第一停止结构,使得从其第一静止位置在第一方向上沿第一轴线移位第一极限路程的第一震动质量机械地接触保持件的第一停止结构。但是,在实施方法步骤st1和st2时,第一震动质量和第二震动质量如此相对于彼此地布置,使得从其第二静止位置在与第一方向相反定向的第二方向上沿第二轴线移位的第二震动质量的第二止挡面机械地接触附着在第一停止结构上的第一震动质量的第一止挡面。因此能够快速地消除第一震动质量在第一停止结构上的不期望的附着或粘接。
46.作为可选的方法步骤st4,还可以附加地如此构造保持件的第二止挡结构,使得从其第一静止位置在第二方向上沿第一轴线移位第二极限路程的第一震动质量机械地接触保持件的第二止挡结构,其中,在实施方法步骤st1和st2时,第一震动质量和第二震动质量
如此相对于彼此地布置,使得从其第二静止位置在第一方向上沿第二轴线移位的第二震动质量的第四止挡面机械地接触附着在第二停止结构上的第一震动质量的第三止挡面。因此,第一震动质量在第二停止结构上的不期望的粘接或附着也可以借助从第二质量到第一质量上的冲量传递而再次取消。
47.方法步骤st1至st3或方法步骤st1至st4能够以任意的顺序、部分地在时间上重叠地或同时地实施。优选地,第一止挡面构造在第一震动质量的第一止挡结构上,第二止挡面构造在第二震动质量的第二止挡结构上,第三止挡面构造在第一震动质量的第三止挡结构上,和/或第四止挡面构造在第二震动质量的第四止挡结构上。由于至少一个止挡结构能够作为能够简单实施的设计措施来实现,因此其构造能够容易地实施,并且可以在没有(显著的)附加成本的情况下实现。
48.在实施在此描述的制造方法时,也可以实现上述微机械构件的其他特征。然而,在此不再对这些特征作重新描述。关于在此描述的制造方法的产品的可用性,参考上述微机械构件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。