1.本发明有关一种自动化饲料管理系统及其管理方法,尤指应用机器对机器触发的自动化饲料管理系统及其管理方法。
背景技术:
2.一般的饲料储放设备多无良好的保存环境,总是依据禽畜即时需要而以即食即送的方式进行管理,且在现有技术中,所述饲料储放设备多仰赖人力巡守,需要耗费大量人力成本与时间。且现有技术的饲料管理方式大多是采用一次配送较多的量,以避免饲料存量不足或需多次运输的问题,但这样一来却容易因为存量过多而导致饲料的质变、生虫、发霉或毁损等问题,造成物料成本的进一步损失。
3.为此,如何设计出一种机器对机器触发的自动化饲料管理系统及其管理方法,特别是解决现有技术的前述技术问题,乃为本案发明人所研究的重要课题。
技术实现要素:
4.本发明之一目的在于提供一种机器对机器触发的自动化饲料管理系统,可解决现有技术中耗费大量人力成本、物料成本以及时间的问题,达到高效率且低管理成本的目的。
5.为了达到前述目的,本发明所提出的机器对机器触发的自动化饲料管理系统应用于饲料储仓,所述自动化饲料管理系统包括:物位感测模块以及终端模块。其中,物位感测模块配置于饲料储仓的外壁面上,物位感测模块对饲料储仓输出可穿透外壁面的雷达波,以获得饲料储仓中的饲料存量,且物位感测模块通过热点触发控制模式或周期触发控制模式输出触发命令。终端模块通过无线通讯连接物位感测模块,且接收物位感测模块的触发命令,终端模块依据触发命令执行饲料配送程序。其中,物位感测模块依据测量频率对饲料储仓输出雷达波,且依据测量频率获得饲料存量。其中,当终端模块在接收到触发命令时,终端模块通过无线通讯输出配置命令至物位感测模块,使物位感测模块重设热点触发控制模式或周期触发控制模式。
6.进一步而言,热点触发控制模式所指的是,当物位感测模块判断饲料存量的数值已低于热点预警值时,物位感测模块输出触发命令至终端模块,终端模块依据触发命令输出饲料生产指令,且执行饲料配送程序。
7.进一步而言,周期触发控制模式所指的是,当物位感测模块判断饲料存量自前次增加数量已届满时间周期时,物位感测模块输出触发命令至终端模块,终端模块依据触发命令输出饲料生产指令,且执行饲料配送程序。
8.进一步而言,物位感测模块包括物位感测器、底座、基座组件、太阳能电力模块以及无线传输模块。其中,物位感测器配置于底座,且朝向饲料储仓。底座具有两个第一滑槽,两个第一滑槽可调整地连接基座组件,使物位感测器通过两个第一滑槽调整物位感测器与饲料储仓的角度。太阳能电力模块连接基座组件,且输出一电力至物位感测器以及无线传输模块。无线传输模块配置于太阳能电力模块的一侧边,且连接物位感测器,物位感测器通
过无线传输模块以及无线通讯连接终端模块。
9.进一步而言,基座组件包括基座、支撑架、承载架以及电池。其中,底座的两个第一滑槽可调整地连接基座;基座两侧具有两个第二滑槽,两个第二滑槽可调整地连接支撑架,使支撑架通过两个第二滑槽调整支撑架的水平位置;太阳能电力模块固设于承载架上,承载架具有两个第三滑槽,两个第三滑槽可调整地连接支撑架,太阳能电力模块通过两个滑槽调整太阳能电力模块与支撑架的角度;电池配置于支撑架,电池储存太阳能电力模块所产生的电力,且输出电力至物位感测器以及无线传输模块。
10.本发明之另一目的在于提供一种机器对机器触发的自动化饲料管理方法,可解决现有技术耗费大量人力成本、物料成本以及时间的问题,达到高效率且低管理成本的目的。
11.为了达到前述另一目的,本发明所提出的机器对机器触发的自动化饲料管理方法应用于饲料储仓,所述自动化饲料管理方法包括:对饲料储仓输出可穿透饲料仓的外壁面的雷达波,以获得饲料储仓中的饲料存量,且通过热点触发控制模式或周期触发控制模式输出触发命令。通过无线通讯接收触发命令,且依据触发命令执行饲料配送程序。其中,依据测量频率对饲料储仓输出雷达波,且依据测量频率获得饲料存量。其中,当接收到触发命令时,通过无线通讯输出配置命令,以重设热点触发控制模式或周期触发控制模式。其中,热点触发控制模式所指的是,当判断饲料存量的数值已低于第一热点预警值时输出触发命令,依据触发命令输出饲料生产指令,且执行饲料配送程序。其中,周期触发控制模式所指的是,当判断饲料存量自前次增加数量已届满第一时间周期时输出触发命令,依据触发命令输出饲料生产指令,且执行饲料配送程序。
12.进一步而言,当接收到触发命令时,通过无线通讯输出出货信息,出货信息包括出货时间、出货数量、第二热点预警值以及第二时间周期。其中,第二热点预警值替换第一热点预警值,第二时间周期替换第一时间周期。
13.进一步而言,触发命令包括控制模式类型、物位感测模块的id编号、物位感测模块的gps信息、饲料储仓内的饲料种类、饲料储仓内的饲料数量以及命令发送时间。
14.进一步而言,控制模式类型包括热点触发控制模式或周期触发控制模式,且热点触发控制模式的优先程度高于周期触发控制模式。
15.进一步而言,饲料配送程序包括:依据具有相同饲料种类的多个触发命令,以及前述多个触发命令中所包括的多个gps信息,于电子地图标示多个运输目标,其中,多个运输目标包括多个主要目标以及多个次要目标。将标示有多个运输目标的电子地图区分为多个地理区块,且依据前述多个gps信息,将多个主要目标以及多个次要目标分配于多个地理区块中。依据多个主要目标形成主要运输路径,其中,以紧急配送需求做为第一权重因子,以次要目标与主要目标之距离由远至近做为第二权重因子,且第一权重因子的优先权高于第二权重因子。依据第一权重因子以及第二权重因子,使各主要目标与其所对应的其中一地理区块中的部分多个次要目标之间、或仅邻近的部分多个次要目标之间形成多个次要运输路径。依据第一权重因子、第二权重因子、多个主要目标以及多个次要目标,于主要运输路径以及多个次要运输路径上运输对应饲料种类的饲料。
16.进一步而言,所述机器对机器触发的自动化饲料管理方法,更包括:依据每次所接收到的触发命令,累计运算控制模式类型、id编号、gps信息、饲料种类、饲料数量以及命令发送时间,且调整饲养成长趋势信息。依据调整后的饲养成长信息,输出调整后的第二热点
预警值以及调整后的第二时间周期,以使第二热点预警值替换第一热点预警值,以及第二时间周期替换第一时间周期。
17.进一步而言,触发命令更包括客户信息、储仓容积、储仓数量、禽畜数量、饲养周期、储仓重量、日均耗水量、日均饲料消耗量的其中至少一者。
18.进一步而言,饲料生产指令包括生产批量排程信息、进销差值信息、物料成本信息、gps派货排程信息、物料周期管理信息、热点追踪信息、物料警示信息的其中至少一者。
19.在使用本发明所述机器对机器触发的自动化饲料管理系统及其管理方法时,物位感测模块通过可穿透饲料储仓的外壁面的雷达波获得饲料存量,且物位感测模块通过无线通讯输出触发命令至终端模块,使得终端模块依据触发命令执行饲料配送程序。如此一来,由于对于饲料储仓内的饲料存量的管理是采用不需要现场人员实时紧盯的无人值守方式,不仅在时效性上反应较为迅速,且长时间可省下可观的人力成本。进一步而言,所述物位感测模块以及终端模块之间是采用机器对机器(machine to machine)的方式进行控制与管理,与现有技术中以即食即送的方式进行管理并不相同,且本发明不需要如现有技术采用一次配送较多的量而导致饲料的质变、生虫、发霉或毁损等问题。
20.为此,本发明所述的机器对机器触发的自动化饲料管理系统及其管理方法,可解决现有技术耗费大量人力成本、物料成本以及时间的问题,达到高效率且低管理成本的目的。
21.为了能更进一步了解本发明为达成预定目的所采取的技术、手段及功效,请参阅以下有关本发明的详细说明以及附图,相信本发明特征以及特点,当可由此得一深入且具体的了解,然而附图仅提供参考以及说明用,并非用来对本发明加以限制者。
附图说明
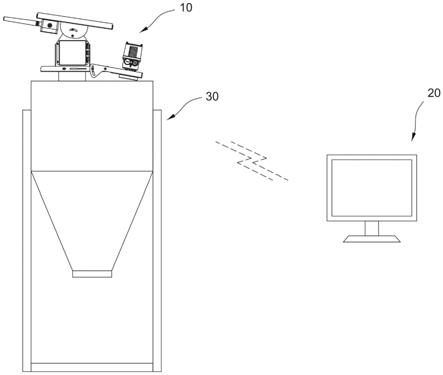
22.图1为本发明机器对机器触发的自动化饲料管理系统的系统示意图;
23.图2、图3为本发明自动化饲料管理系统的物位感测模块的架构示意图;
24.图4为本发明自动化饲料管理方法的流程示意图;
25.图5为本发明自动化饲料管理系统的示意图;以及
26.图6为本发明自动化饲料管理系统的饲养成长趋势信息示意图。
27.其中,附图标记:
28.10:物位感测模块
29.11:物位感测器
30.12:底座
31.13:基座组件
32.14:太阳能电力模块
33.15:无线传输模块
34.20:终端模块
35.30:饲料储仓
36.121:第一滑槽
37.141:太阳能板
38.142:太阳能控制盒
39.151:无线控制盒
40.152:天线
41.131:基座
42.132:支撑架
43.133:承载架
44.134:电池
45.200:电子地图
46.201、m1、m2、m3:主要目标
47.202、n1、n2:次要目标
48.300:主要运输路径
49.400:次要运输路径
50.1311:第二滑槽
51.1331:第三滑槽
52.a:保育趋势线
53.b:肥育趋势线
54.a1:保育耗用趋势线
55.b1:肥育耗用趋势线
56.c1、c2、c3:饲料增加量
57.d1:储仓上限
58.d2:热点预警值
59.d3:储仓下限
60.s1~s4:步骤
具体实施方式
61.下面结合附图对本发明的结构原理和工作原理作具体的描述:
62.以下通过特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。本发明亦可通过其他不同的具体实例加以施行或应用,本发明说明书中的各项细节亦可基于不同观点以及应用在不悖离本发明的精神下进行各种修饰以及变更。
63.须知,本说明书的附图所示的结构、比例、大小、元件数量等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解以及阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应落在本发明所揭示的技术内容得能涵盖之范围内。
64.兹有关本发明的技术内容及详细说明,配合附图说明如下。
65.请参阅图1及图2所示。其中,图1为本发明机器对机器触发的自动化饲料管理系统的系统示意图。图2、图3为本发明自动化饲料管理系统的物位感测模块的架构示意图。
66.在本发明的一实施例中,所述机器对机器触发的自动化饲料管理系统应用于饲料储仓,所述自动化饲料管理系统包括:物位感测模块10以及终端模块20。其中,物位感测模
块10配置于饲料储仓30的外壁面上,物位感测模块10对饲料储仓30输出可穿透外壁面的雷达波(图中未示),以获得饲料储仓30中的饲料存量,且物位感测模块10通过热点触发控制模式或周期触发控制模式输出触发命令(图中未示)。所述终端模块20可以是电脑主机或云端工作站,终端模块20通过无线通讯连接物位感测模块10,且接收物位感测模块10的触发命令,终端模块20依据触发命令执行饲料配送程序。进一步而言,物位感测模块10依据测量频率(即各测量动作之间间隔有特定时间间隔)对饲料储仓30输出雷达波,且依据所述测量频率获得饲料存量。当终端模块20在接收到触发命令时,终端模块20通过无线通讯输出配置命令(图中未示)至物位感测模块10,使物位感测模块10重设热点触发控制模式或周期触发控制模式。
67.在本发明的所述实施例中,热点触发控制模式所指的是,当物位感测模块10判断饲料存量的数值已低于热点预警值(可以是存于饲料储仓30中的饲料的高度阀值,可介于储仓上限以及储仓下限之间)时,物位感测模块10输出触发命令至终端模块20,终端模块20依据触发命令输出饲料生产指令(图中未示),且执行饲料配送程序。在本发明的所述实施例中,周期触发控制模式所指的是,当物位感测模块10判断饲料存量自前次增加数量(亦可增加必须到达前次最大总数量或前次新增数量的限制阀值,然本发明不受限制)已届满时间周期时,物位感测模块10输出触发命令至终端模块20,终端模块20依据触发命令输出饲料生产指令,且执行饲料配送程序。
68.如图2及图3所示,物位感测模块10包括物位感测器11、底座12、基座组件13、太阳能电力模块14以及无线传输模块15。其中,物位感测器11配置于底座12,且朝向饲料储仓30(如图1所示)。底座12具有两个第一滑槽121,两个第一滑槽121可调整地连接基座组件13,使物位感测器11通过两个第一滑槽121调整物位感测器11与饲料储仓30的角度。太阳能电力模块14连接基座组件13,且输出电力至物位感测器11以及无线传输模块15。其中,太阳能电力模块14包括太阳能板141以及太阳能控制盒142,太阳能板141可通过太阳能控制盒142连接如下述的电池134,太阳能控制盒142中可包括太阳能控制器(图中未示)。无线传输模块15配置于太阳能电力模块14的侧边,且连接物位感测器11,物位感测器11通过无线传输模块15以及无线通讯连接终端模块20。其中,无线传输模块15包括无线控制盒151以及天线152,物位感测器11通过无线控制盒151连接天线152。进一步而言,所述无线传输模块15可相容于窄频物联网(narrowband internet of things,nb-iot)或lora wan、lte等通讯架构,然而本发明不受此限制。
69.进一步而言,基座组件13包括基座131、支撑架132、承载架133以及电池134。其中,底座12的两个第一滑槽121可调整地连接基座131。基座131两侧具有两个第二滑槽1311,两个第二滑槽1311可调整地连接支撑架132,使支撑架132通过两个第二滑槽1311调整支撑架132的水平位置。太阳能电力模块14的太阳能板141固设于承载架133上,太阳能电力模块14的太阳能控制盒142固设于支撑架132的侧边。承载架133具有两个第三滑槽1331,两个第三滑槽1331可调整地连接支撑架132,太阳能电力模块14的太阳能板141通过两个第三滑槽1331调整太阳能板141与支撑架132的角度。电池134配置于支撑架132,电池134储存太阳能电力模块14所产生的电力,且输出电力至物位感测器11以及无线传输模块15。
70.请参阅图4所示,为本发明自动化饲料管理方法的流程示意图。其余元件符号请一并参照图1至图3所示。
71.在使用本发明所述机器对机器触发的自动化饲料管理系统时,首先,物位感测模块10对饲料储仓30输出可穿透外壁面的雷达波,以获得饲料储仓30中的饲料存量(步骤s1)。继而,物位感测模块10通过热点触发控制模式或周期触发控制模式输出触发命令。若为热点触发控制模式,物位感测模块10判断饲料存量的数值是否已低于热点预警值(步骤s2)。当物位感测模块10判断饲料存量的数值已低于热点预警值时,物位感测模块10输出触发命令至终端模块20,终端模块20依据触发命令输出饲料生产指令,且执行饲料配送程序(步骤s4)。若为周期触发控制模式,物位感测模块10判断该饲料存量自前次增加数量是否已届满时间周期(步骤s3)。当物位感测模块10判断饲料存量自前次增加数量已届满时间周期时,物位感测模块10输出触发命令至终端模块20,终端模块20依据触发命令输出饲料生产指令,且执行饲料配送程序(步骤s4)。
72.其中,触发命令包括控制模式类型、物位感测模块10的id编号、物位感测模块10的gps信息、饲料储仓30内的饲料种类、饲料储仓30内的饲料数量以及命令发送时间。控制模式类型包括热点触发控制模式或周期触发控制模式,且热点触发控制模式的优先程度高于周期触发控制模式。当终端模块20接收到该触发命令时,终端模块20通过无线通讯输出出货信息(图中未示)。出货信息包括出货时间、出货数量、第二热点预警值以及第二时间周期。其中,第二热点预警值替换第一热点预警值,第二时间周期替换第一时间周期。即与前述配置命令重设热点触发控制模式或周期触发控制模式的功用相同,重新调整热点预警值或时间周期。
73.请参阅图5所示,为本发明自动化饲料管理系统的示意图。
74.所述饲料配送程序可包括下列所述:依据具有相同饲料种类(例如依据饲养的禽畜种类或年龄分类)的多个触发命令,以及前述多个触发命令中所包括的多个gps信息,于电子地图200标示多个运输目标。其中,多个运输目标可包括多个主要目标201以及多个次要目标202。将标示有多个运输目标的电子地图200区分为多个地理区块,且依据前述多个gps信息,将多个主要目标201以及多个次要目标202分配于多个地理区块中,如图5所示,依据多个主要目标201形成主要运输路径300。其中,以紧急配送需求做为第一权重因子,以次要目标202与主要目标201的距离由远至近做为第二权重因子,且第一权重因子的优先权高于第二权重因子。依据第一权重因子以及第二权重因子,使各主要目标201与其所对应的其中该地理区块中的部分多个次要目标202之间、或仅邻近的部分多个次要目标之间形成多个次要运输路径400。依据第一权重因子、第二权重因子、多个主要目标201以及多个次要目标202,于主要运输路径300以及多个次要运输路径400上运输对应饲料种类的饲料。
75.进一步而言,所述饲料配送程序可以是依据物料分类演算法,其依照配送物料需求,相同物料于同一派送车辆,并以gps信息或google资料库比对以得知客户位置信息。且运用euler graphic理论的分群演算法,依照配送位置对gps信息做位置分群,以主要目标201计算最短路径,确定主要运输路径300。且针对次要运输路径400而言,如图5所示的主要目标m1、m2、m3以及次要目标n1、n2,在主要目标201范围内,可对次要目标202进行顺时针或逆时针顺序的派送。
76.图6为本发明自动化饲料管理系统的饲养成长趋势信息示意图。所述的机器对机器触发的自动化饲料管理方法,更包括下列步骤:依据每次所接收到的触发命令,累计运算控制模式类型、id编号、gps信息、饲料种类、饲料数量以及命令发送时间,且调整饲养成长
趋势信息。如图6所示,前述饲养成长趋势信息可包括饲料日用量图表以及饲料存量图表。在饲料日用量图表中,可以由曲线斜率分出两段发展趋势线,分别为保育趋势线a以及肥育趋势线b。且对应在所述保育趋势线a的时间区间内的饲料存量呈保育耗用趋势线a1,对应在所述肥育趋势线b的时间区间内的饲料存量呈肥育耗用趋势线b1。
77.若以周期触发控制模式来看,在饲养时间轴上如饲料增加量c1(如左侧全实线斜纹方块)使得总饲料存量已到达储仓上限d1时(假设前次增加饲料也是增加到储仓上限d1),即重设周期触发控制模式的时间周期,直至下次周期届满时,再对饲料储仓30添加饲料增加量c1(如右侧全实线斜纹方块)。
78.若以热点触发控制模式来看,在饲养时间轴上如总饲料存量已低于介于储仓上限d1以及储仓下限d3之间的热点预警值d2时,即触发物位感测模块10输出触发命令至终端模块20,且终端模块20纪录本次饲料出货后添加至储仓上限d1的饲料增加量c2(如左侧实线虚线交错斜纹方块),直至下次总饲料存量再一次低于热点预警值d2时,终端模块20亦纪录饲料出货后添加至储仓上限d1的饲料增加量c3(如右侧实线虚线交错斜纹方块)。
79.进一步而言,终端模块20可依据前述内容调整饲养成长趋势信息(即保育趋势线a、肥育趋势线b、保育耗用趋势线a1以及肥育耗用趋势线b1),且依据调整后的饲养成长信息,输出调整后的第二热点预警值(图中未示)以及调整后的第二时间周期(图中未示),以使第二热点预警值替换第一热点预警值,以及第二时间周期替换第一时间周期。
80.为此,本发明所述的机器对机器触发的自动化饲料管理系统及其管理方法,可解决现有技术中耗费大量人力成本、物料成本以及时间之问题,达到高效率且低管理成本的目的。
81.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。