1.本实用新型涉及电池自动化批量生产技术领域,特别涉及电池老化板六轴搬运机械手。
背景技术:
2.在实际生产中,通常需要对电池进行化成处理,使得电池性能表现更为稳定。人力搬送老化板途中,能够直接接触电池本体,容易刮伤电池,导致电池的不良率高,且老化板位置摆放不准确,效率低,难以有效的控制由人为因素而造成的不确定性。最好的改进方向是自动化设备,它能代替人的繁重劳动,能在工作环境复杂的场合工作且稳定。
技术实现要素:
3.本实用新型目的在于开发一套高效率的自动化集成设备,针对上述技术的不足之处,实用新型电池老化板六轴搬运机械手装置,通过机械搬运老化板而取代人工搬运,从而提高生产效率,优化电池品质,更有利于生产自动化。
4.为了解决上述的情况,本实用新型提出了一种电池老化板六轴搬运机械手,其特征在于:包括基座、六轴机械手、控制机构以及夹持机构,所述六轴机械手、所述控制机构安装于所述基座上,并且所述控制机构的信号输出端与所述六轴机械手的控制端、所述夹持机构的控制端电连接;所述夹持机构安装于所述六轴机械手的活动末端,包括主连接板、横向驱动装置以及一对夹持装置,所述主连接板固定安装于所述六轴机械手的活动末端,所述主连接板包括第一端部及与所述第一端部相对的第二端部,所述第一端部、所述第二端部各铺装一组直线轨道,且所述直线轨道彼此平行或同轴;以直线轨道轴向为横向,以垂直主连接板方向为纵向,所述横向驱动装置共两套,分别安装于所述第一端部和所述第二端部,并保持所述横向驱动装置的伸缩端沿横向伸缩;两套所述夹持装置通过连接板可滑动地安装于同端部的所述直线导轨上,并与同端部的横向驱动装置的伸缩端相连接;两套所述夹持装置的夹持部位于所述主连接板同侧且正对,形成用于夹持老化板的夹爪。
5.进一步,所述夹持装置包括纵向驱动装置、纵向安装板、支撑底板、压板以及位置检测装置,所述纵向驱动装置安装于所述纵向安装板上,并保持所述纵向驱动装置的伸缩端沿纵向伸缩;所述纵向安装板通过连接板可滑动地安装于所述直线导轨上,并且所述纵向安装板与所述横向驱动装置的伸缩端相连接;所述支撑底板固定安装于所述纵向安装板远离主连接板的端部,并与所述主连接板平行;所述压板设置于所述主连接板与所述支撑底板之间,所述压板固定安装于所述纵向驱动装置的伸缩端,并且所述压板与所述主连接板平行,所述压板与所述支撑底板之间形成夹住老化板的夹紧区;所述位置检测装置设置于所述纵向安装板上,并且所述位置检测装置的检测端对准夹紧区,用于检测老化板是否夹持在指定位置。
6.进一步,所述电池老化板六轴搬运机械手还包括报警装置和推动装置,所述报警装置安装于所述主连接板上,所述推动装置设置于所述主连接板的侧面,并且所述推动装
置的推动端与所述报警器接触连接,用于检测老化板是否推动至指定位置。
7.进一步,所述六轴机械手包括旋转式安装座和机械手,所述旋转式安装座固定安装于所述基座的顶部,并在所述旋转式安装座上设置转盘组件,并且所述转盘组件的中心轴垂直于所述主连接板;所述转盘转动连接有转动驱动组件,并且所述转动驱动组件以所述转盘的中心为轴转动;所述转动驱动组件的输出部安装所述机械手,所述转动驱动组件的输出部与所述转动驱动组件的转动方向垂直;所述机械手的活动末端安装所述夹持机构,并且所述转动驱动组件的控制端、所述机械手的控制端均与所述控制机构相应的信号输出端电连接。
8.本实用新型的有益效果是:通过夹持机构夹持老化板,六轴机械手横向、纵向移动及转动,从而方便的将老化板移动至目标位置;通过所述的搬运机械手搬运老化板取代人力搬运、提高生产效率、优化电池品质,有利于生产自动化。
附图说明
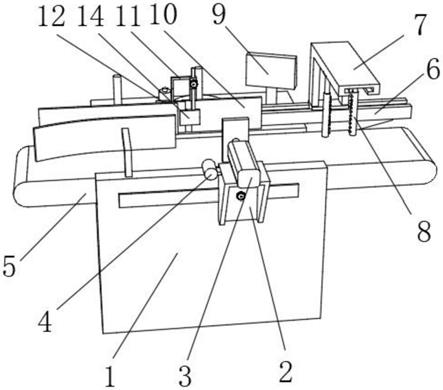
9.图1为本实用新型的结构示意图。
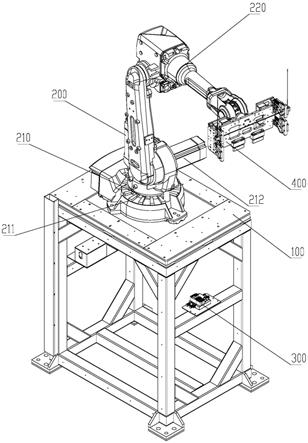
10.图2为本实用新型的夹持机构的示意图。
具体实施方式
11.下面结合附图进一步说明本实用新型。
12.参照附图:
13.实施例1本实用新型提出了一种电池老化板六轴搬运机械手,包括基座100、六轴机械手200、控制机构300以及夹持机构400,所述基座100为一框架式结构,其底部可以固定在其他安装面上;所述六轴机械手200、所述控制机构300安装于所述基座100上,并且所述控制机构300的信号输出端与所述六轴机械手200的控制端、所述夹持机构400的控制端电连接,用于控制六轴机械手以及夹持机构工作;
14.所述夹持机构400用于夹紧或放开老化板,安装于所述六轴机械手200的活动末端,包括主连接板480、横向驱动装置430以及一对夹持装置440,所述主连接板480固定安装于所述六轴机械手200的活动末端,所述主连接板480包括第一端部及与所述第一端部相对的第二端部,所述第一端部、所述第二端部各铺装一组直线轨道410,且所述直线轨道410彼此平行或同轴;以直线轨道轴向为横向,以垂直主连接板方向为纵向,所述横向驱动装置430共两套,分别安装于所述第一端部和所述第二端部,并保持所述横向驱动装置430的伸缩端沿横向伸缩;两套所述夹持装置440通过连接板420可滑动地安装于同端部的所述直线导轨410上,并与同端部的横向驱动装置430的伸缩端相连接;两套所述夹持装置440的夹持部位于所述主连接板480同侧且正对,形成用于夹持老化板的夹爪。
15.所述夹持装置440包括纵向驱动装置441、纵向安装板443、支撑底板444、压板442以及位置检测装置450,所述纵向驱动装置441安装于所述纵向安装板443上,并保持所述纵向驱动装置441的伸缩端沿纵向伸缩;所述纵向安装板443通过连接板420可滑动地安装于所述直线导轨410上,并且所述纵向安装板443与所述横向驱动装置430的伸缩端相连接;所述支撑底板444固定安装于所述纵向安装板443远离主连接板480的端部,并与所述主连接板480平行;所述压板442设置于所述主连接板480与所述支撑底板444之间,所述压板442固
定安装于所述纵向驱动装置441的伸缩端,并且所述压板442与所述主连接板480平行,所述压板442与所述支撑底板444之间形成夹住老化板的夹紧区;所述位置检测装置450设置于所述纵向安装板443上,并且所述位置检测装置450的检测端对准夹紧区,用于检测老化板是否夹持在指定位置。
16.所述电池老化板六轴搬运机械手还包括报警装置460和推动装置470,所述报警装置470安装于所述主连接板480上,所述推动装置470设置于所述主连接板480的侧面,并且所述推动装置470的推动端与所述报警器470接触连接,用于检测老化板是否推动至指定位置。
17.所述六轴机械手200可实现纵向移动、横向移动和转动,包括旋转式安装座210和机械手220,所述旋转式安装座210固定安装于所述基座100的顶部,并在所述旋转式安装座210上设置转盘组件211,并且所述转盘组件211的中心轴垂直于所述主连接板;所述转盘组件211转动连接有转动驱动组件212,并且所述转动驱动组件212以所述转盘组件211的中心为轴转动;所述转动驱动组件212的输出部安装所述机械手220,所述转动驱动组件212的输出部与所述转动驱动组件212的转动方向垂直,即与所述转盘组件211垂直;所述机械手220的活动末端安装所述夹持机构400,并且所述转动驱动组件212的控制端、所述机械手220的控制端均与所述控制机构300相应的信号输出端电连接。
18.所述主连接板480为一矩形板。
19.本说明书实施例所述的内容仅仅是对实用新型构思的实现形式的列举,本实用新型的保护范围不应当被视为仅限于实施例所陈述的具体形式,本实用新型的保护范围也包括本领域技术人员根据本实用新型构思所能够想到的等同技术手段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。