1.本实用新型涉及农业机械电控盒领域,尤其涉及农业机械机械手一杆操纵智能电控盒。
背景技术:
2.随着青储机、打捆机、各种联合收割机等现代化农业机械进程的加快,如何提高田间谷物收获标准化作业水平,减轻驾驶员的劳动强度,充分发挥现代农业机械在保证国家粮食安全中的作用,为实现对青储机、打捆机、各种联合收割机等现代化农业机械的手柄按键自动控制,需要对青储机、打捆机、各种联合收割机等现代化农业机械原有的拉线操作系统进行改装,为保证改装后操作系统的手动转向功能不变。
3.由于现有市场上农业机械电控盒使用过程中操作不简便,故障频率比较高,可靠性差,制作工艺繁琐,电路板焊接复杂,给电控系统生产厂家和农机生产厂家带来很多烦恼。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的农业机械机械手一杆操纵智能电控盒。
5.为了实现上述目的,本实用新型采用了如下技术方案:农业机械机械手一杆操纵智能电控盒,包括电控盒本体,所述电控盒本体内部的左侧设置有输入检测电路,所述电控盒本体内部位于输入检测电路的前侧设置有电源模块,所述电控盒本体内部位于输入检测电路的右侧设置有微控制器,所述电控盒本体内部位于微控制器的右侧设置有驱动芯片,所述电控盒本体内部位于驱动芯片的右侧设置有mos,所述电控盒本体右侧的前后两端均设置有输出接口,所述输出接口的右侧分别设置有第一连接线和第二连接线。
6.作为上述技术方案的进一步描述:
7.所述电控盒本体的底端固定连接有安装板,所述安装板的四角出均设置有预留安装孔。
8.作为上述技术方案的进一步描述:
9.所述电控盒本体左侧的中部设置有控制线,所述控制线的左端设置有控制接头。
10.作为上述技术方案的进一步描述:
11.所述第二连接线的右端设置有第二接头,所述第一连接线的右端设置有第一接头。
12.作为上述技术方案的进一步描述:
13.所述电源模块均与微控制器和驱动芯片电性连接。
14.作为上述技术方案的进一步描述:
15.所述微控制器通过驱动芯片与mos相连。
16.作为上述技术方案的进一步描述:
17.所述mos与输出接口之间电性连接。
18.作为上述技术方案的进一步描述:
19.所述输入检测电路与微控制器之间电性连接。
20.本实用新型具有如下有益效果:
21.1、本实用新型中,首先电控盒本体内部是采用微控制器、驱动芯片、电源电路、输入检测电路、mos组成,其结构工艺更简单,厂家生产起来更快捷,同时让生产农机、工程机械的厂家在组装车过程中按照更省心,同事降低了用户的使用成本,以及降低了使用过程中的故障率,提高了农机使用过程中终端用户的满意度。
22.2、本实用新型中,由于电控盒本体通过将控制接头与外部的控制按钮进行连接,从而可以通过外部的控制按钮控制一个或者多个由第一接头与第二接头所连接的电磁阀,从而操作方便快捷有效。
附图说明
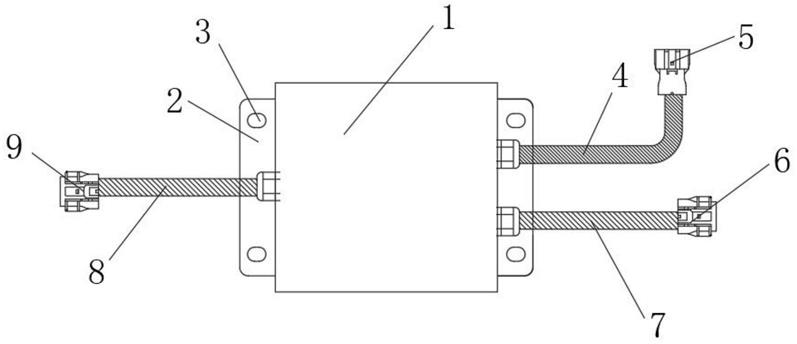
23.图1为本实用新型提出的农业机械机械手一杆操纵智能电控盒的外观图;
24.图2为本实用新型提出的农业机械机械手一杆操纵智能电控盒中电控盒内部的结构图。
25.图例说明:
26.1、电控盒本体;2、安装板;3、预留安装孔;4、第一连接线;5、第一接头;6、第二接头;7、第二连接线;8、控制线;9、控制接头;10、mos;11、驱动芯片;12、微控制器;13、输出接口;14、电源模块;15、输入检测电路。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.参照图1-2,本实用新型提供的一种实施例:农业机械机械手一杆操纵智能电控盒,包括电控盒本体1,电控盒本体1内部的左侧设置有输入检测电路15,输入检测电路15可以检测由控制接头9所连接的外部控制按钮的状态,电控盒本体1内部位于输入检测电路15的前侧设置有电源模块14,电源模块14将电源转换成微控制器12所需要的电压,电控盒本
体1内部位于输入检测电路15的右侧设置有微控制器12,微控制器12控制对应的io负荷输出,io输出经过对应的驱动芯片11,控制对应的mos10导通后可驱动由第一接头5与第二接头6所连接的电磁阀进行工作,电控盒本体1内部位于微控制器12的右侧设置有驱动芯片11,电控盒本体1内部位于驱动芯片11的右侧设置有mos10,电控盒本体1右侧的前后两端均设置有输出接口13,输出接口13的右侧分别设置有第一连接线4和第二连接线7,当检测到外部控制按钮输入后,微控制器12控制对应的io负荷输出,io输出经过对应的驱动芯片11,控制对应的mos10导通后可驱动由第一接头5与第二接头6所连接的电磁阀进行工作。
30.电控盒本体1的底端固定连接有安装板2,安装板2的四角出均设置有预留安装孔3,通过预留安装孔3进行安装,电控盒本体1左侧的中部设置有控制线8,控制线8的左端设置有控制接头9,控制接头9与外部的控制按钮进行连接,第二连接线7的右端设置有第二接头6,第一连接线4的右端设置有第一接头5,第一接头5与第二接头6与外部的电磁阀进行连接,电源模块14均与微控制器12和驱动芯片11电性连接,电源模块14将电源转换成微控制器12所需要的电压,微控制器12通过驱动芯片11与mos10相连,微控制器12可以通过驱动芯片11来控制的mos10的通断,mos10与输出接口13之间电性连接,便于信号的传输,输入检测电路15与微控制器12之间电性连接,微控制器12通过输入检测电路15检测由控制接头9所连接的外部控制按钮的状态。
31.工作原理:首先电源模块14将电源转换成微控制器12所需要的电压,微控制器12通过输入检测电路15检测由控制接头9所连接的外部控制按钮的状态,当检测到外部控制按钮输入后,微控制器12控制对应的io负荷输出,io输出经过对应的驱动芯片11,控制对应的mos10导通后可驱动由第一接头5与第二接头6所连接的电磁阀进行工作,当微控制器12检测到外部控制按钮释放后,控制对用的io不输出,对应的mos10不导通,对应的由第一接头5与第二接头6所连接的电磁阀断开。
32.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。