1.本技术涉及电池自动化处理技术领域,特别是关于自动处理电池的装置。
背景技术:
2.目前,锂电池制造业迅猛发展,各种处理工序一直都是分开进行,每个工作流程配置相应的电气控制系统,导致自动化程度低,设备占用厂房空间大,并不能满足低成本、小空间、高效率电池生产需求。
技术实现要素:
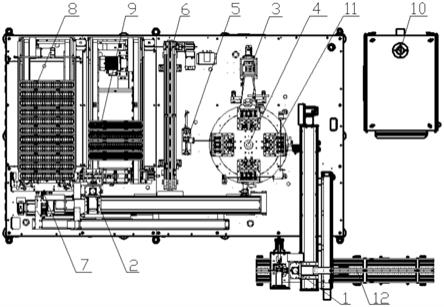
3.本技术的主要目的在于提供一种自动处理电池的方装置,旨在解决自动处理电池的设备集成化低、占用空间较大,电池处理流程繁琐、智能化程度低的技术问题。为实现上述目的,本技术提供一种自动处理电池的装置,该自动处理电池的装置用于实现上述任意一项的自动处理电池的方法,包括上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4、扫码模块5、ng拉带6、移盘模块7、托盘进盘模块8、托盘出盘模块9、烟雾净化器10、上料夹具11和上料拉带12;
4.所述上料夹爪模块1从所述上料拉带12上取料后放入所述上料夹具11中,所述上料夹爪模块1包括第一手指气缸28、第二手指气缸29、第三手指气缸35、第四手指气缸36、第一夹爪33、第二夹爪34、第三夹爪37、第四夹爪38、第一皮带模组21、第二伺服电机22、第一伺服电机24、第一丝杆模组25、第三拖链26、第四气缸30、第一导轨滑块31、转接板43、缓冲板44、第一液压缓冲器32、安装架45、第二液压缓冲器46;
5.所述第一手指气缸28、所述第二手指气缸29、所述第三手指气缸35和所述第四手指气缸36分别与所述第一夹爪33、所述第二夹爪34、所述第三夹爪37和所述第四夹爪38一一对应,并且分别带动各自对应的所述第一夹爪33、所述第二夹爪34、所述第三夹爪37和所述第四夹爪38夹紧夹爪各自对应的第一电池39、第二电池40、第三电池41和第四电池42;
6.所述第一伺服电机24带动所述第一丝杆模组25旋转,带动电池向上移动到安全位,线路气管安装在所述第三拖链26中,柔性运行;
7.所述第二伺服电机22带动所述第一皮带模组21旋转,将所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42分别运送到所述上料夹具11上方;
8.所述第一手指气缸28和所述第二手指气缸29安装在所述转接板43上,所述转接板43安装在所述第一导轨滑块31的滑块上,所述转接板43和所述缓冲板44连接在一起,所述第四气缸30的活塞杆和所述缓冲板44连接在一起,当所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42从所述上料拉带12上方向所述上料夹具11上方运动时,所述第四气缸30可带动所述缓冲板44滑动,同时带动所述第一手指气缸28、所述第二手指气缸29和所述第三电池41、所述第四电池42向所述第一电池39、所述第二电池40移动,完成变距,使所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42两两之间间距相等;
9.所述第一液压缓冲器32固定在所述安装架45上,第二液压缓冲器46安装在所述缓冲板44上,当所述缓冲板44向所述第四气缸30方向滑动时,所述缓冲板44会撞到所述第一液压缓冲器32上,起到缓冲作用,当所述缓冲板44远离所述第四气缸30滑动时,所述第二液压缓冲器46会撞到所述安装架45上,起到缓冲作用;
10.当所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42移动到所述上料夹具11上方时,所述第一伺服电机24带动所述第一丝杆模组25旋转,带动所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42向下移动到上料夹具11内;
11.所述第一手指气缸28、所述第二手指气缸29、所述第三手指气缸35和所述第四手指气缸36分别带动各自对应的所述第一夹爪33、所述第二夹爪34、所述第三夹爪37和所述第四夹爪38松开所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42,所述第一伺服电机24带动所述第一丝杆模组25旋转,带动所述第一夹爪33、所述第二夹爪34、所述第三夹爪37和所述第四夹爪38上升到安全位,完成上料。
12.可选的,所述上料夹具11包括第五气缸51、夹板63、开夹推块64、第一排尘口61、第二导轨滑块71、夹紧弹簧72、第一活动夹紧块73、固定夹紧块74、夹具底板75、第一固定架76、弹簧挡板77、螺钉78和压板79;
13.所述开夹推块64和所述第一固定架76固定在一起,所述第一固定架76装在所述第二导轨滑块71上,所述第二导轨滑块71安装在所述夹具底板75上,所述第一固定架76和所述活动夹紧块73固定在一起,所述压板79固定在所述第一固定架76上,所述弹簧挡板77固定在所述夹具底板75上,所述螺钉78穿过所述弹簧挡板77后固定在所述压板79上,所述夹紧弹簧72套在所述螺钉78上;
14.当所述第五气缸51推动所述夹板63向前移动时,所述夹板63会推动所述开夹推块64,对所述夹紧弹簧72进行压缩,所述活动夹紧块73和所述固定夹紧块74之间的距离变大,用来放入所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42;当放完所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42后,所述第五气缸51拉动所述夹板63向后移动,所述活动夹紧块73在所述夹紧弹簧72的弹力作用下向所述固定夹紧块74移动,夹紧所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42,所述第三液压缓冲器62在开、夹时起到缓冲的作用,所述上料夹具11用于对电池精确定位,保证刻码焦距准确。
15.可选的,所述转盘模块4包括dd马达53、刻码夹具55、扫码夹具56、下料夹具57、转盘58;
16.所述转盘58固定在所述dd马达53上,所述dd马达53可带动所述转盘58旋转,所述转盘58上的4个工位依次均匀设有所述上料夹具11、所述刻码夹具55、所述扫码夹具56和所述下料夹具57,所述在4个工位,在所述dd马达53每次旋转90
°
时,所述4个工位可依次切换,所述4工位分别是上料工位、刻码工位、扫码工位、下料工位;
17.当在所述上料夹具11完成上料后,转盘旋转90
°
,在所述刻码夹具55处刻码;刻完码后,转盘旋转90
°
,在所述扫码夹具56处扫码;扫完码后,转盘旋转90
°
;在所述下料夹具57处下料。
18.可选的,所述激光刻码模块3包括第二丝杆模组81、振镜头82、第二固定架83、支架84、第二排烟口85和第三伺服电机86;
19.所述第二固定架83和所述第二丝杆模组81固定在一起,所述振镜头82安装在所述第二固定架83上,所述振镜头82可传出激光,在电池侧面刻码,所述第三伺服电机86可带动所述丝杠模组81旋转,从而调节所述振镜头82与所述刻码夹具55之间的距离,调节刻码焦距;
20.所述第二排烟口85安装在所述支架84上,所述第二排烟口85与所述烟雾净化器10采用管道连接,用于吸走刻码时向上漂浮的烟尘,所述第一排尘口61与所述烟雾净化器10采用管道连接,用于吸走刻码时从排尘孔66向下掉落的烟尘。
21.可选的,所述扫码模块5包括第六气缸91、第三导轨滑块92、第三固定架94和扫码枪93;
22.所述第三固定架94和所述第三导轨滑块92固定在一起,所述第六气缸91和所述第三固定架94连接在一起,所述扫码枪93安装在所述第三固定架94上,所述扫码枪93对所述扫码夹具56中的所述第一电池39、所述第二电池40、所述第三电池41和所述第四电池42进行扫码,所述扫码枪93先对所述第一电池39和所述第二电池40进行扫码,然后所述第六气缸91带动所述扫码枪93移动,切换位置再对所述第三电池41和所述第四电池42进行扫码。
23.可选的,还包括第七气缸52,所述第七气缸52用于推开所述下料夹具57上的第二活动夹紧块731,打开所述下料夹具57,以备所述入盘夹爪模块2从所述下料夹具57内取电池入盘。
24.可选的,所述入盘夹爪模块2动作,电池在扫码工位扫完码后,转盘旋转90
°
,所述第七气缸52推开所述下料夹具57上的第二活动夹紧块731,打开所述下料夹具57;
25.所述第四伺服电机106带动第三丝杆模组107旋转,带动第五夹爪115、第六夹爪116、第七夹爪117、第八夹爪118向下移动到所述下料夹具57内,第八手指气缸111、第九手指气缸112、第十手指气缸113和第十一手指气缸114带动所述第五夹爪115、所述第六夹爪116、所述第七夹爪117和所述第八夹爪118夹紧第五电池119、第六电池120、第七电池121和第八电池122;
26.所述第四伺服电机106带动所述第三丝杆模组107旋转,带动所述第五电池119、所述第六电池120、所述第七电池121和所述第八电池122向上移动到安全位。
27.可选的,所述入盘夹爪模块2包括第五伺服电机102、第一拖链103和第二皮带模组104、第二拖链105、第四伺服电机106和第三丝杆模组107;
28.所述第五伺服电机102带动所述第二皮带模组104旋转,将所述第五电池119、所述第六电池120、所述第七电池121和所述第八电池122运送到下料托盘上方位置a;
29.所述第四伺服电机106带动第所述三丝杆模组107旋转,带动所述第五电池119、所述第六电池120、所述第七电池121和所述第八电池122向下移动到托盘内,所述第八手指气缸111、所述第九手指气缸112、所述第十手指气缸113和所述第十一手指气缸114带动所述第五夹爪115、所述第六夹爪116、所述第七夹爪117和所述第八夹爪118松开电池;
30.所述第四伺服电机106带动所述第三丝杆模组107旋转,带动空的所述第五夹爪115、所述第六夹爪116、所述第七夹爪117和所述第八夹爪118向上移动到安全位,入盘完成,其中线路气管安装在第一拖链103、第二拖链105中柔性运行。
31.可选的,在所述移盘模块7中包括第六伺服电机131、第三皮带模组132、第四拖链133、第十二气缸134、第十三气缸135、第十四气缸138、第四导轨滑块136、第五导轨滑块
139、第九夹爪137、第十夹爪140、托架141、转接架142、第六导轨滑块143、第七导轨滑块144和托盘145;
32.所述第十三气缸135、所述第十四气缸138、所述第四导轨滑块136、所述第五导轨滑块139、所述第九夹爪137、所述第十夹爪140均安装在所述托架141上;
33.所述托架141安装在所述第六导轨滑块143和所述第七导轨滑块144上,所述第六导轨滑块143、第七导轨滑块144安装在转接架142上,所述转接架142安装在所述第三皮带模组132上;
34.当空托盘从所述托盘进盘模块8进料到位时,气缸第十四气缸138带动第十夹爪140,第十三气缸135带动第九夹爪137,将托盘夹紧;所述第十二气缸134将所述托架141顶起来,同时将所述托盘145顶起来,所述第六伺服电机131带动所述第三皮带模组132转动,将所述托盘145从位置b转移到位置a;所述第十二气缸134将所述托架141降下去,同时将所述托盘145降下去,完成空托盘从所述托盘进盘模块8,向所述托盘出盘模块9的移动,线路气管安装在第四拖链133中柔性运行。
35.可选的,所述移盘模块7、所述托盘进盘模块8、所述托盘出盘模块9共同动作实现托盘的运转;
36.在所述托盘进盘模块8中,第七电机161带动第一皮带162和第二皮带163,将空托盘沿方向c运转到第一挡板164和第二挡板165处;所述移盘模块7将所述托盘145从位置b转移到位置a;在所述托盘出盘模块9中,首先,第十五气缸175在顶升状态,当所述移盘模块7将托盘145放到位置a时,第十六气缸172带动第一限位块174伸出,第十八气缸171带动第二限位块173伸出,第十八气缸171带动第二限位块173退回,第十七气缸176带动第十一夹爪177和第十二夹爪178将托盘夹紧,第十六气缸172带动第一限位块174退回,完成对托盘的精确定位,下料入盘夹爪模块2准确将电池119、120、121、122放入位置a的托盘中;当所述入盘夹爪模块2将电池放满托盘后,第十七气缸176带动第十一夹爪177和第十二夹爪178将所述托盘145松开,第十五气缸175下降,将装好电池的所述托盘145放到第三皮带167和第四皮带168上;第八电机166带动第三皮带167和第四皮带168将托盘依次延方向d运转,完成托盘的下料。
37.可选的,当出现扫码不良品时,所述入盘夹爪模块2将不良的电池放到ng拉带6的第五皮带192上,所述第九电机191带动第五皮带192将不良的电池依次转移,导向杆193用于对电池运转时进行导向。
38.本技术提供一种自动处理电池的方法、装置及计算机可读存储介质:
39.本技术提供一种自动处理电池的方法,包括:
40.接收指令,并将所述指令发送至上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4和扫码模块5;
41.通过上料夹爪模块1上料将电池组从上料拉带12放入处于上料工位的上料夹具11中,通过所述上料夹具11夹紧所述电池组,所述电池组中至少包括1个电池;
42.通过旋转转盘模块4使得处于所述上料夹具11中的所述电池组切换至刻码工位,通过激光刻码模块3对所述电池组中的电池侧面逐一刻码;
43.通过旋转转盘模块4使得处于所述上料夹具11中的所述电池组切换至扫码工位,通过扫码模块5对所述电池组中的电池侧面逐一扫码;
44.判断是否达到预设扫码时长;
45.若达到预设扫码时长,则判断是否存在不良的电池;若未达到预设扫码时长,则返回执行判断是否达到预设扫码时长的步骤,直至达到预设扫码时长;
46.若存在不良的电池,则下料入盘夹爪模块2,将不良的所述电池放到拉带6的皮带192上,电机191带动皮带192将不良的所述电池依次转移,通过导向杆193对运转中的所述电池进行导向;若步存在不良的电池,则通过入盘夹爪模块2将下料夹具57中的4个电池取出,放入托盘出盘模块9上的托盘中;
47.判断所述托盘中是否放满电池;
48.若所述托盘中放满电池,则满料的所述托盘沿托盘出盘模块9流走,得到合格的电池,移盘模块7从托盘进盘模块8上将下一个空托盘转移到托盘出盘模块9上,以备入盘夹爪模块2放置电池;
49.判断所述合格的电池的总量是否小于预定量;
50.若合格的电池的总量小于预定量,则执行接收指令,并将所述指令发送至上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4和扫码模块5的步骤;若合格的电池的总量大于或等于预定量,则得到目标电池。
51.可选的,在通过上料夹爪模块1上料将电池组从上料拉带12放入处于上料工位的上料夹具11中,通过所述上料夹具11夹紧所述电池组,所述电池组中至少包括1个电池的步骤之前,还包括:
52.通过氦检装置对每个电池组中的电池进行氦检。
53.可选的,在若合格的电池的总量大于或等于预定量,则得到目标电池的步骤之后,还包括:
54.将所述目标电池放入干燥炉进行干燥。
55.本技术提供一种可实现上述任意一种自动处理电池的方法的设备,其特征在于,包括:
56.接收模块,用于接收指令,并将所述指令发送至上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4和扫码模块5;
57.夹持模块,用于通过上料夹爪模块1上料将电池组从上料拉带12放入处于上料工位的上料夹具11中,通过所述上料夹具11夹紧所述电池组,所述电池组中至少包括1个电池;
58.切换模块,用于通过旋转转盘模块4使得处于所述上料夹具11中的所述电池组切换至刻码工位,通过激光刻码模块3对所述电池组中的电池侧面逐一刻码;
59.扫码模块,用于通过旋转转盘模块4使得处于所述上料夹具11中的所述电池组切换至扫码工位,通过扫码模块5对所述电池组中的电池侧面逐一扫码;
60.第一判断模块,用于判断是否达到预设扫码时长;
61.第二判断模块,用于在达到预设扫码时长时,则判断是否存在不良的电池;若处于未达到预设扫码时长的情况,则执行判断是否达到预设扫码时长的步骤,直至达到预设扫码时长;
62.传送模块,用于若存在不良的电池,则下料入盘夹爪模块2,将不良的所述电池放到拉带6的皮带192上,电机191带动皮带192将不良的所述电池依次转移,通过导向杆193对
运转中的所述电池进行导向;若否,则通过入盘夹爪模块2将下料夹具57中的4个电池取出,放入托盘出盘模块9上的托盘中;
63.第三判断模块,用于判断所述托盘中是否放满电池;
64.转移模块,用于在所述托盘中放满电池时,则满料的所述托盘沿托盘出盘模块9流走,得到合格的电池,移盘模块7从托盘进盘模块8上将下一个空托盘转移到托盘出盘模块9上,以备入盘夹爪模块2放置电池;
65.第四判断模块,用于判断所述合格的电池的总量是否小于预定量;
66.接收或获取模块,在合格的电池的总量小于预定量时,则执行接收指令,并将所述指令发送至上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4和扫码模块5的步骤;而在合格的电池的总量大于或等于预定量时,则得到目标电池。
67.可选的,氦检模块,用于通过氦检装置对每个电池组中的电池进行氦检。
68.可选的,干燥模块,用于将所述目标电池放入干燥炉进行干燥。
69.提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述中任一种自动处理电池的方法的步骤。
70.本技术的有益效果为:
71.1、自动化集成度高,将上料、刻码、扫码、入盘,下料、托盘存储机构、托盘进盘机构、托盘出盘机构、排烟等模块集成在一起,占用空间小,成本低;
72.2、产效率高,每次可同时转移4个电池,实际生产中,该设备每分钟可生产30个电池;
73.3、刻码夹具简单可靠,夹具靠弹簧弹力夹紧,将4个电池的侧面压在了固定夹紧块上,保证了每套夹具每个电池的刻码焦距,相比其他刻码方式,保证了刻码焦距精确性;
74.4、转盘上无电气元器件,转盘上的夹具靠弹簧弹力夹紧,没有电气元器件,转盘不用电气滑环走电气管路,结构简洁;
75.5、上下盘模块简洁可靠,易维护,相比于通常的上下层进出盘方式,在实际生产中由于空间限制难维护,此申请采用左右上下盘方式,维护空间大,易于维护,可提高自动化产线实际应用的稳定性;
76.6、将多个工序集成在一起,减小了硬件设备的空间大小,自动化程度高,提高了生产效率。
附图说明
77.图1为本技术俯视方向的示意图;
78.图2为本技术上料夹爪模块1的局部放大图;
79.图3为本技术上料夹爪模块1的另一局部放大图;
80.图4为本技术转盘模块4局部放大图;
81.图5为本技术转盘模块4一方向的局部放大图;
82.图6为本技术转盘模块4另一方向的局部放大图;
83.图7为本技术上料夹具11的局部放大图;
84.图8为本技术上料夹具11另一方向的局部放大图;
85.图9为本技术激光刻码模块3的局部放大图;
86.图10为本技术扫码模块5的局部放大图;
87.图11为本技术入盘夹爪模块2的局部放大图;
88.图12为本技术入盘夹爪模块2进一步的局部放大图;
89.图13为本技术移盘模块7的局部放大图;
90.图14为本技术移盘模块7、托盘进盘模块8、托盘出盘模块9整体示意图;
91.图15为本技术托盘出盘模块9的局部放大图;
92.图16为本技术ng拉带6的局部放大图。
93.附图中,1为上料夹爪模块,2为入盘夹爪模块,3为激光刻码模块,4为转盘模块,5为扫码模块,6为ng拉带,7为移盘模块,8为托盘进盘模块,9为托盘出盘模块,10为烟雾净化器,11为上料夹具,12为上料拉带,21为第一皮带模组、22为第二伺服电机、23为立柱、24为第一伺服电机、25为第一丝杆模组、26为第三拖链、28为第一手指气缸、29为第二手指气缸、30第四气缸、31第一导轨滑块、32为第一液压缓冲器、33为第一夹爪、34为第二夹爪、35为第三手指气缸、36为第四手指气缸、37为第三夹爪、38为第四夹爪、39为第一电池、40为第二电池、41为第三电池、42为第四电池、43为转接板、44为缓冲板、45为安装架、46为第二液压缓冲器、51为第五气缸、52为第七气缸、53为dd马达、55为刻码夹具、56为扫码夹具、57为下料夹具、58为转盘、61为第一排尘口、62为第三液压缓冲器、63为夹板、64为开夹推块、66为第一排尘口、71为第二导轨滑块、72为夹紧弹簧、73为第一活动夹紧块、74为固定夹紧块、75为夹具底板、76为第一固定架、77为弹簧挡板、78为螺钉、79为压板、81为第二丝杆模组、82为振镜头、83为第二固定架、84为支架、85为第二排烟口、86为第三伺服电机、91为第六气缸、92为第三导轨滑块、93为扫码枪、94为第三固定架、731为第二活动夹紧块、102为第五伺服电机、103为第一拖链、104为第二皮带模组、105为第二拖链、106为第四伺服电机、107为第三丝杆模组、带动第五夹爪115、第六夹爪116、第七夹爪117、118为第八夹爪、111为第八手指气缸、112为第九手指气缸、113为第十手指气缸、114为第十一手指气缸、115为第五夹爪、116为第六夹爪、117为第七夹爪、118为第八夹爪、119为第五电池、120为第六电池、121为第七电池、122为第八电池、131为第六伺服电机、132为第三皮带模组、133为第四拖链、134为第十二气缸、135为第十三气缸、136为第四导轨滑块、137为第九夹爪、138为第十四气缸、139为第五导轨滑块、140为第十夹爪、141为托架、142为转接架、143为第六导轨滑块、144为第七导轨滑块、145为托盘、161第七电机、162第一皮带、163为第二皮带、164为第一挡板、165为第二挡板、166为第八电机、167为第三皮带、168第四皮带、第十八气缸171、172第十六气缸、173第二限位块、174为第一限位块、175为第十五气缸、176为第十七气缸、177为第十一夹爪、178为第十二夹爪、191为第九电机、192为第五皮带、193为导向杆。
具体实施方式
94.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。在本技术的描述中,需要理解的是,术语“内”、“上”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
95.此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。在本技术的描述中,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
96.下面结合附图、实施例对本技术进行进一步说明:
97.请参考图1,提供自动处理电池的装置,包括上料夹爪模块1,入盘夹爪模块2,激光刻码模块3,转盘模块4,扫码模块5,ng拉带6,移盘模块7,托盘进盘模块8,托盘出盘模块9,烟雾净化器10,上料夹具11,上料拉带12;
98.请参考图1、图2、图3,上料夹爪模块1。上料夹爪模块1从上料拉带12上取料。并放入上料夹具11中。手指气缸28、29、35、36带动夹爪33、34、37、38夹紧电池39、40、41、42。伺服电机24带动丝杆模组25旋转,带动电池向上移动到安全位,线路气管安装在拖链26中柔性运行。伺服电机22带动皮带模组21旋转,将电池39、40、41、42运送到上料夹具11上方,立柱23用来安装皮带模组21。
99.图3中,气缸28、29安装在转接板43上,转接板43安装在导轨滑块31的滑块上,转接板43和缓冲板44连接在一起,气缸30的活塞杆和缓冲板44连接在一起,当电池39、40、41、42从拉带12上方向上料夹具11上方运动时,气缸30可带动缓冲板44滑动,同时带动气缸28、29和电池41、42向电池39、40移动,完成变距,使电池39、40、41、42两两之间间距相等。图3中,第一液压缓冲器32固定在安装架45上,液压缓冲器46安装在缓冲板44上,当缓冲板44向气缸30方向滑动时,缓冲板44会撞到第一液压缓冲器32上,起到缓冲作用,当缓冲板44远离气缸30滑动时,液压缓冲器46会撞到安装架45上,起到缓冲作用。当电池39、40、41、42移动到上料夹具11上方时,伺服电机24带动丝杆模组25旋转,带动电池向下移动到上料夹具11内。手指气缸28、29、35、36带动夹爪33、34、37、38松开电池39、40、41、42。伺服电机24带动丝杆模组25旋转,带动空夹爪33、34、37、38上升到安全位,上料完成。
100.请参考图5、图6、图7、图8,上料夹具11上主要包含开夹推块64、导轨滑块71、夹紧弹簧72、活动夹紧块73、固定夹紧块74、夹具底板75、固定架76,弹簧挡板77,螺钉78,压板79。开夹推块64和固定架76固定在一起,固定架76装在导轨滑块71上,导轨滑块71安装在夹具底板75上,固定架76和活动夹紧块73固定在一起,压板79固定在固定架76上,弹簧挡板77固定在夹具底板75上,螺钉78穿过弹簧挡板77后固定在压板79上,弹簧72套在螺钉78上。当气缸51推动夹板63向前移动时,夹板63会推动开夹推块64,对夹紧弹簧72进行压缩,活动夹紧块73和固定夹紧块74之间的距离变大,用来放入电池39、40、41、42。当放完电池39、40、41、42后,气缸51拉动夹板63向后移动,夹具上的活动夹紧块73在夹紧弹簧72的弹力作用下向固定夹紧块74移动,夹紧电池39、40、41、42,夹具可对电池精确定位,保证刻码焦距准确。62液压缓冲器在开夹时起到缓冲的作用。
101.请参考图4、图5,转盘58固定在dd马达53上,dd马达53可带动转盘58旋转,转盘58上面装有4套相同的夹具,均匀分布在4个工位,在马达53每次旋转90
°
时,4个工位可依次切
换。4工位分别是上料工位、刻码工位、扫码工位、下料工位,4个工位上的夹具依次命名为上料夹具11,刻码夹具55,扫码夹具56,下料夹具57。当在上料夹具11完成上料后,转盘旋转90
°
,在刻码夹具55处刻码。刻完码后,转盘旋转90
°
,在扫码夹具56处扫码。扫完码后,转盘旋转90
°
,在下料夹具57处下料。
102.请参考图9,激光刻码模块3,主要包含丝杆模组81,振镜头82,固定架83,支架84,第二排烟口85,伺服电机86。固定架83和丝杆模组81固定在一起,振镜头82安装在固定架83上。振镜头82可传出激光,在电池侧面刻码,伺服电机86可带动丝杠模组81旋转,从而调节振镜头82与刻码夹具55之间的距离,调节刻码焦距。第二排烟口85安装在支架84上,第二排烟口85与烟雾净化器10采用管道连接,可吸走刻码时向上漂浮的烟尘。图5中第一排尘口61,也与烟雾净化器10采用管道连接,可吸走刻码时从图6中排尘孔66向下掉落的烟尘。
103.请参考图10,扫码模块5,主要包含气缸91,导轨滑块92,固定架94,扫码枪93。固定架94和导轨滑块92固定在一起,气缸91和固定架94连接在一起,扫码枪93安装在固定架94上。扫码枪对夹具56中的4个电池39、40、41、42进行扫码。扫码枪先对电池39、40进行扫码,然后气缸91带动扫码枪93移动,切换位置再对电池41、42进行扫码。
104.请参考图4和图7,下料夹具57,和气缸52,气缸52和气缸51动作原理相同,气缸52可以推开夹具57上的活动夹紧块73,打开夹具,以备入盘夹爪模块2从下料夹具57内取电池入盘。
105.请参考图11,图12,图14,图4和图6,入盘夹爪模块2动作。电池在扫码工位扫完码后,转盘旋转90
°
。气缸52推开夹具57上的活动夹紧块73,打开下料夹具57。伺服电机106带动丝杆模组107旋转,带动夹爪115、116、117、118向下移动到下料夹具57内,手指气缸111、112、113、114带动夹爪115、116、117、118夹紧电池119、120、121、122。伺服电机106带动丝杆模组107旋转,带动电池119、120、121、122向上移动到安全位。伺服电机102带动皮带模组104旋转,将电池119、120、121、122运送到下料托盘上方位置a。伺服电机106带动丝杆模组107旋转,带动电池119、120、121、122向下移动到托盘内,手指气缸111、112、113、114带动夹爪115、116、117、118松开电池119、120、121、122。伺服电机106带动丝杆模组107旋转,带动空夹爪115、116、117、118向上移动到安全位,入盘完成。其中线路气管安装在拖链103、105中柔性运行,立柱101用来安装皮带模组104。
106.请参考图13,图14,移盘模块7,托盘进盘模块8,托盘出盘模块9。在移盘模块7中,第六伺服电机131,第三皮带模组132,第四拖链133,第十二气缸134,第十三气缸135、138,第四导轨滑块导轨滑块136、第五导轨滑块139,第九夹爪137、140,托架141,转接架142,第六导轨滑块143、第七导轨滑块144,托盘145。第十三气缸135、138,导轨滑块136、139,第九夹爪137、140均安装在托架141上。托架141安装在第六导轨滑块143和第七导轨滑块144上,第六导轨滑块143、第七导轨滑块144安装在转接架142上,转接架142安装在第三皮带模组132上。当空托盘从托盘进盘模块8进料到位时,第十四气缸138带动第十夹爪140,第十三气缸135带动第九夹爪137,将托盘夹紧。第十二气缸134将托架141顶起来,同时将托盘145顶起来。第六伺服电机131带动第三皮带模组132转动,将托盘145从位置b转移到位置a。第十二气缸134将托架141降下去,同时将托盘145降下去,完成空托盘从托盘进盘模块8,向托盘出盘模块9的移动。线路气管安装在第四拖链133中柔性运行
107.请参考图13、图14、图15,移盘模块7,托盘进盘模块8,托盘出盘模块9共同动作实
现托盘的运转。托盘进盘模块8中,第七电机161带动皮带162和皮带163,将空托盘延方向c运转到第一挡板164和挡板165。移盘模块7将托盘145从位置b转移到位置a。托盘出盘模块9中,首先,第十五气缸175在顶升状态,当移盘模块7将托盘145放到位置a时,第十六气缸172带动第一限位块174伸出,第十八气缸171带动第二限位块173伸出,第十八气缸171带动第二限位块173退回,第十七气缸176带动夹爪177和夹爪178将托盘夹紧,第十六气缸172带动第一限位块174退回。以上动作完成了对托盘的精确定位,以保证下料入盘夹爪模块2准确将电池119、120、121、122放入位置a的托盘中。当下料入盘夹爪模块2将电池放满托盘后,第十七气缸176带动夹爪177和夹爪178将托盘松开,第十五气缸175下降,将装好电池的托盘放到第三皮带167和第四皮带168上。第八电机166带动第三皮带167和第四皮带168将托盘依次延方向d运转,完成托盘的下料。
108.请参考图16,ng拉带6。当出现扫码不良品时,下料入盘夹爪模块2会将不良的电池放到拉带6的第五皮带192上,电机191会带动第五皮带192将不良的电池依次转移,导向杆193用来对电池运转时进行导向。
109.实施步骤:
110.第一步,上料夹爪模块1上料,将4个电池从上料拉带12放入上料夹具11中。
111.请参考图1、图2、图3,上料夹爪模块1,第一手指气缸28、第二手指气缸29、第三手指气缸35、第四手指气缸36带动第一夹爪33、第二夹爪34、第三夹爪37、第四夹爪38夹紧39为第一电池、40为第二电池、41为第三电池、42为第四电池,第一伺服电机24带动第一丝杆模组旋转,带动上述电池向上移动到安全位,线路气管安装在第三拖链26中柔性移动,第二伺服电机22带动第一皮带模组21旋转,将电池39、40、41、42运送到上料夹具11上方,立柱23用来安装皮带模组21。
112.图3中,第一手指气缸28、第二手指气缸29安装在转接板43上,转接板43安装在第一导轨滑块31的滑块上,转接板43和缓冲板44连接在一起,第四气缸30的活塞杆和缓冲板44连接在一起,当电池39、40、41、42从上料拉带12上方向上料夹具11上方运动时,第四气缸30可带动缓冲板44滑动,同时带动第一手指气缸28、第二手指气缸29和电池41、42向电池39、40移动,完成变距,使电池39、40、41、42两两之间间距相等(由于本实际产线中,上料拉带12上电池39、40之间的间距a1,电池41、42之间的间距a2,电池40、41之间的间距a3。a1=a2≠a3,因此需要变距。若其他产线中a1=a2=a3,则不用变距)。
113.图3中,第一液压缓冲器32固定在安装架45上,液压缓冲器46安装在缓冲板44上,当缓冲板44向第四气缸30方向滑动时,缓冲板44会撞到第一液压缓冲器32上,起到缓冲作用,当缓冲板44远离第四气缸30滑动时,第二液压缓冲器46会撞到安装架45上,起到缓冲作用。当电池39、40、41、42移动到上料夹具11上方时,第一伺服电机24带动第一丝杆模组25旋转,带动电池向下移动到上料夹具11内。28为第一手指气缸、29为第二手指气缸、35为第三手指气缸、36为第四手指气缸带动夹爪33、34、37、38松开电池39、40、41、42。第一伺服电机24带动第一丝杆模组25旋转,带动空夹爪33、34、37、38上升到安全位,上料完成。
114.第二步,上料夹具11对4个电池进行夹紧。
115.请参考图4、图5、图6、图7、图8,上料夹具11上主要包含开夹推块64、第二导轨滑块71、夹紧弹簧72、第一活动夹紧块73、固定夹紧块74、夹具底板75、第一固定架76,弹簧挡板77,螺钉78,压板79。开夹推块64和第一固定架76固定在一起,第一固定架76装在第二导轨
滑块71的滑块上,第二导轨滑块71的导轨安装在夹具底板75上,第一固定架76和第一活动夹紧块73固定在一起,压板79固定在固定架76上,弹簧挡板77固定在夹具底板75上,螺钉78穿过弹簧挡板77后固定在压板79上,夹紧弹簧72套在螺钉78上。当第五气缸51推动夹板63向前移动时,夹板63会推动开夹推块64,对夹紧弹簧72进行压缩,第一活动夹紧块73和固定夹紧块74之间的距离变大,用来放入电池39、40、41、42。当放完电池39、40、41、42后,第五气缸51拉动夹板63向后移动,夹具上的第一活动夹紧块73在夹紧弹簧72的弹力作用下向固定夹紧块74移动,夹紧电池39、40、41、42。第三液压缓冲器62在夹紧时起到缓冲的作用。
116.由于夹具夹紧后,将4个电池的侧面压在了固定夹紧块74上,保证了每套夹具每个电池的刻码焦距,相比其他刻码方式,保证了刻码焦距精确性。
117.第三步,转盘模块4旋转。
118.请参考图4、图5,转盘58固定在dd马达53上,dd马达53可带动转盘58旋转,转盘58上面装有4套相同的夹具,均匀分布在4个工位,在马达53每次旋转90
°
时,4个工位可依次切换。4工位分别是上料工位、刻码工位、扫码工位、下料工位,4个工位上的夹具依次命名为上料夹具11,刻码夹具55,扫码夹具56,下料夹具57。当在上料夹具11完成上料后,转盘旋转90
°
,在刻码夹具55处刻码。刻完码后,转盘旋转90
°
,在扫码夹具56处扫码。扫完码后,转盘旋转90
°
,在下料夹具57处下料。
119.第四步,激光刻码模块3对刻码夹具55中的4个电池侧面逐一刻码。
120.请参考图9,激光刻码模块3,主要包含丝杆模组81,振镜头82,第二固定架83,支架84,第二排烟口85,第三伺服电机86。第二固定架83和第二丝杆模组81固定在一起,振镜头82安装在第二固定架83上。当上料夹具11对4个电池39、40、41、42夹紧后,dd马达53带动转盘58旋转90
°
,4个电池39、40、41、42移动到夹具55位置。振镜头82可传出激光,在4个电池侧面逐一刻码,第三伺服电机86可带动第二丝杆模组81旋转,从而调节振镜头82与刻码夹具55之间的距离,调节刻码焦距。第二排烟口85安装在支架84上,第二排烟口85与烟雾净化器10采用管道连接,可吸走刻码时向上漂浮的烟尘。图5中第一排尘口61,也与烟雾净化器10采用管道连接,可吸走刻码时从图6中排尘孔66向下掉落的烟尘。
121.由于丝杆模组的精度可达
±
0.01mm,因此,此结构可保证刻码焦距调节的精确性。
122.生产时,可通过人机界面对刻码焦距、刻码时间、刻码位置、刻码尺寸大小、刻码内容进行设置。
123.第五步,扫码模块5对扫码夹具56中的4个电池扫码。
124.请参考图10,扫码模块5,主要包含第六气缸91、第三导轨滑块92、固定架94、扫码枪93、第三固定架和第三导轨滑块92的滑块固定在一起,第六气缸91和第三固定架94连接在一起,扫码枪93安装在第三固定架94上。当4个电池39、40、41、42在刻码夹具55处刻完码后,dd马达53带动转盘58旋转90
°
,4个电池39、40、41、42移动到扫码夹具56位置。扫码枪对夹具56中的4个电池39、40、41、42进行扫码。扫码枪先对电池39、40进行扫码,然后第六气缸91带动扫码枪93移动,切换位置再对电池41、42进行扫码,系统对扫码结果进行保存。
125.生产时,可通过人机界面对扫码时间进行设置。
126.第六步,入盘夹爪模块2将下料夹具57中的4个电池取出,放入托盘出盘模块9上的托盘中。
127.请参考图4、图5、图6、图7、图8,下料夹具57、第七气缸52,第七气缸52和第五气缸
51动作原理相同、第七气缸52可以推开下料夹具57上的第一活动夹紧块73,打开夹具,以备入盘夹爪模块2从下料夹具57内取电池。
128.请参考图11、图12、图14、图4、图6、图7,入盘夹爪模块2动作。当4个电池39、40、41、42在扫码夹具56处扫完码后,dd马达53带动转盘58旋转90
°
,4个电池39、40、41、42转移到下料夹具57处。气缸52推开夹具57上的活动夹紧块73,打开下料夹具57。伺服电机106带动丝杆模组107旋转,带动夹爪115、116、117、118向下移动到下料夹具57内,手指气缸111、112、113、114带动夹爪115、116、117、118夹紧电池119、120、121、122。第四伺服电机106带动第三丝杆模组107旋转,带动电池119、120、121、122向上移动到安全位。第五伺服电机102带动第二皮带模组104旋转,将电池119、120、121、122从下料夹具57上方,运送到下料托盘上方位置a。第四伺服电机106带动第三丝杆模组107旋转,带动电池119、120、121、122向下移动到托盘内,手指气缸111、112、113、114带动夹爪115、116、117、118松开电池119、120、121、122。伺服电机106带动第三丝杆模组107旋转,带动空夹爪115、116、117、118向上移动到安全位,入盘完成。
129.其中线路气管安装在第一拖链链103、第二拖链105中柔性移动,立柱101用来安装第二皮带模组104。
130.第七步,当托盘出盘模块9上的托盘放满电池后,满料托盘延托盘出盘模块9流走,移盘模块7从托盘进盘模块8上将下一个空托盘转移到托盘出盘模块9上,以备入盘夹爪模块2放电池。
131.请参考图13,图14,移盘模块7,托盘进盘模块8,托盘出盘模块9。在移盘模块7中,第六伺服电机131,第三皮带模组132,第四拖链133,第十二气缸134,第十三气缸135、第十四气缸138,第四导轨滑块136、第五导轨滑块139,第九夹爪137、第十夹爪140,托架141,转接架142,第六导轨滑块143、第七导轨滑块144,托盘145。气缸135、138,导轨滑块136、第五导轨滑块139,夹爪137、140均安装在托架141上。托架141安装在第六导轨滑块143和第七导轨滑块的滑块上,第六导轨滑块143、第七导轨滑块144的导轨安装在转接架142上,转接架142安装在皮带模组132上。
132.当空托盘从托盘进盘模块8进料到位时,第十四气缸138带动第十夹爪140,第十三气缸135带动第九夹爪137,将托盘夹紧。第十二气缸134将托架141顶起来,同时将托盘145顶起来。第六伺服电机131带动第三皮带模组132转动,将托盘145从位置b转移到位置a。第十二气缸134将托架141降下去,同时将托盘145降下去。第十四气缸138带动第十夹爪140,第十三气缸135带动第九夹爪137,将托盘松开。完成空托盘从托盘进盘模块8,向托盘出盘模块9的移动。线路气管安装在第四拖链133中柔性移动。
133.请参考图13、图14、图15,移盘模块7,托盘进盘模块8,托盘出盘模块9共同动作实现托盘的运转。托盘进盘模块8中,第七电机161带动第一皮带162和第二皮带163转动,将空托盘延方向c转移到第一挡板164和挡板165位置。
134.移盘模块7将托盘145从位置b转移到位置a。
135.托盘出盘模块9中,首先,第十五气缸175在顶升状态,当移盘模块7将托盘145放到位置a时,第十六气缸172带动第一限位块174伸出,第十八气缸171带动第二限位块173伸出,第十八气缸171带动第二限位块173退回,第十七气缸176带动夹爪177和夹爪178将托盘夹紧,第十六气缸172带动第一限位块174退回。以上动作完成了对托盘的精确定位,以保证
下料入盘夹爪模块2精确将电池119、120、121、122放入位置a的托盘中。当下料入盘夹爪模块2将电池放满托盘后,第十七气缸176带动夹爪177和夹爪178将托盘松开,第十五气缸175下降,将装好电池的托盘放到第三皮带167和第四皮带168上。第八电机166带动第三皮带167和第四皮带168转动,将托盘依次延方向d运转,完成托盘的下料。
136.第八步,扫码ng下料。
137.请参考图16,ng拉带6。当出现扫码不良品时,下料入盘夹爪模块2会将扫码不良的电池放到ng拉带6的第五皮带192上,电机191会带动第五皮带192将不良的电池依次转移,导向杆193用来对电池运转时进行导向。
138.以上是本自动化集成设备的实施步骤,机台内部以此实施步骤循环,完成电池生产。
139.相比传统装置,具有以下优势:
140.自动化集成度高。将上料、刻码、扫码、入盘,下料、托盘存储机构、托盘进盘机构、托盘出盘机构、排烟等模块集成在一起,占用空间小,成本低。
141.产效率高。每次同时转移4个电池,实际生产中,该设备每分钟可生产30个电池。
142.刻码夹具简单可靠。夹具靠弹簧弹力夹紧,将4个电池的侧面压在了固定夹紧块上,保证了每套夹具每个电池的刻码焦距,相比其他刻码方式,保证了刻码焦距精确性。
143.转盘上无电气元器件。转盘上的夹具靠弹簧弹力夹紧,没有电气元器件,转盘不用电气滑环走电气管路,结构简洁。
144.上下盘模块简洁可靠,易维护。相比于通常的上下层进出盘方式,在实际生产中由于空间限制难维护。此申请采用左右上下盘方式,维护空间大,易于维护,可提高自动化产线实际应用的稳定性。
145.提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述中任一种自动处理电池的方法的步骤。具体包括:
146.本技术实施例提供的一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,计算机程序被处理器执行时实现如下步骤:步骤s10,接收指令,并将所述指令发送至上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4和扫码模块5;
147.通过上料夹爪模块1上料将电池组从上料拉带12放入处于上料工位的上料夹具11中,通过所述上料夹具11夹紧所述电池组,所述电池组中至少包括1个电池;
148.通过旋转转盘模块4使得处于所述上料夹具11中的所述电池组切换至刻码工位,通过激光刻码模块3对所述电池组中的电池侧面逐一刻码;
149.通过旋转转盘模块4使得处于所述上料夹具11中的所述电池组切换至扫码工位,通过扫码模块5对所述电池组中的电池侧面逐一扫码;
150.判断是否达到预设扫码时长;
151.若达到预设扫码时长,则判断是否存在不良的电池;若否,则返回步骤s50,直至达到预设扫码时长;
152.若未达到预设扫码时长,则下料入盘夹爪模块2,将不良的所述电池放到拉带6的皮带192上,电机191带动皮带192将不良的所述电池依次转移,通过导向杆193对运转中的所述电池进行导向;若否,则通过入盘夹爪模块2将下料夹具57中的4个电池取出,放入托盘出盘模块9上的托盘中;
153.判断所述托盘中是否放满电池;
154.若所述托盘中放满电池,则满料的所述托盘沿托盘出盘模块9流走,得到合格的电池,移盘模块7从托盘进盘模块8上将下一个空托盘转移到托盘出盘模块9上,以备入盘夹爪模块2放置电池;
155.判断所述合格的电池的总量是否小于预定量;
156.若合格的电池的总量小于预定量,则执行接收指令,并将所述指令发送至上料夹爪模块1、入盘夹爪模块2、激光刻码模块3、转盘模块4和扫码模块5的步骤;若合格的电池的总量大于或等于预定量,则得到目标电池。
157.本技术提供的一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,计算机程序被处理器执行时实现如下步骤:通过氦检装置对每个电池组中的电池进行氦检。
158.本技术提供的一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,计算机程序被处理器执行时实现如下步骤:将所述目标电池放入干燥炉进行干燥。
159.本技术所涉及的计算机可读存储介质包括只读存储器(rom)、随机存储器(ram)、内存、电可编程rom、寄存器、硬盘、可移动磁盘或技术领域内所公知的任意其它形式的存储介质。
160.以上所揭露的仅为本技术的较佳实例,不能以此来限定本技术之权利范围,因此依本技术权利要求所作的等同变化,仍属本技术所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。