1.本实用新型涉及船舶压载水岸基接收与处理技术领域,特别涉及一种用于接收船舶压载水的爬壁机器人。
背景技术:
2.船舶压载水指为控制船舶横倾、纵倾、吃水、稳性或应力而加装到船上的水及悬浮物质。船舶的压载水舱是存储压载水的船舱,压载水舱分布在双层底舱、首尖舱、尾尖舱、舷侧边舱、深水舱及高边柜。
3.船舶在靠港期间,一般需要将压载水舱中的压载水排出,目前处理达标的压载水主要是直接排海,造成了水资源的浪费,尤其是内贸船舶中的淡水压载水直接排海会造成淡水资源的极大浪费。此外,根据压载水公约要求,不满足压载水公约d-2标准的船舶压载水可上岸接收并应急处置。但目前船舶压载水上岸接收装置并无标准,造成了上岸接收难的现状为了回收船舶压载水,部分船舶进行了管路改造,可以对船舶压载水进行部分接收。船舶高边柜的出口一般位于船舶侧面,目前针对船舶高边柜中压载水回收利用的改造方案较少,高边柜中的船舶压载水由于安装管道进行接收比较困难,因此仍以直接侧面排海为主。
技术实现要素:
4.本实用新型的目的是提供一种克服船舶压载水在岸基接收与处置过程中的接收难、接口不统一等问题的用于接收船舶压载水的爬壁机器人。
5.为此,本实用新型技术方案如下:
6.一种用于接收船舶压载水的爬壁机器人,包括设置在安装架体上的磁力爬壁机构和可伸缩管道接头;其中,
7.磁力爬壁机构包括两组移动机构和两台驱动电机;两组移动机构对称设置在安装架体的两侧侧壁下部,两台驱动电机固定在安装架体内;每组移动机构由一条环形履带以及设置在环形履带内两侧的履带驱动轮和张紧调节装置构成;履带为由平行设置的双链条将等间距且呈一字排列的若干块磁性履带板串联而成的环形带体;履带驱动轮轮体外缘上的轮齿与履带啮合,且设置在履带驱动轮中心孔内的转动轴与邻侧驱动电机的输出轴相连接,以驱动履带驱动轮转动并带动履带运转;张紧调节装置包括支撑轮和调节机构,支撑轮通过调节机构可转动地固定在安装架体上且其与履带驱动轮之间的间距可调;
8.可伸缩管道接头包括环形电磁铁、若干根电动推杆、环形柔性垫圈、管道连接器和不锈钢波纹管;不锈钢波纹管内置于安装架体内,环形电磁铁和管道连接器分别与不锈钢波纹管同轴设置并固定在其两端侧;管道连接器固定在安装架体的顶板中心开孔处;若干根电动推杆以其轴线平行于不锈钢波纹管的方式环绕不锈钢波纹管均布设置,每根电动推杆的底座固定在管道连接器上、推杆杆端固定在环形电磁铁上,使环形电磁铁能够随若干根电动推杆伸长而自安装架体的底板中心开孔伸出安装架体外侧;环形柔性垫圈套装并固
定在环形电磁铁的内壁上,且其前端露出至环形电磁铁外侧。
9.进一步地,履带板由至少一块永磁体、一块软磁体、一个永磁体保护套和一个环形铝框构成;永磁体居中叠放设置于软磁体上;永磁体保护套为一轴向截面为u形的外套,其倒置设置并完全套装在永磁体外侧;环形铝框套装并紧箍在永磁体及软磁体的外侧使四者形成一个整体。
10.进一步地,张紧调节机构包括固定块和调节杆;调节杆为由短杆和长杆一体成型形成的l形杆体,其长杆呈水平状态设置在安装架体外侧,其短杆垂直于支撑轮的轮面设置并通过安装在短杆杆端的滚动轴承装配在支撑轮的中心孔内,使支撑轮能够相对于调节杆自由转动;固定块为内侧尺寸与调节杆的长杆尺寸相适应的u形结构,且其两端分别向外侧延伸形成有固定翼,使调节杆的长杆杆端设置在固定块的u形结构内侧,并通过设置在固定块两侧固定翼上的紧固螺栓将固定块和调节杆固定在安装架体的侧壁上,同时通过在水平方向上调节调节杆的长杆相对于固定块的位置。
11.进一步地,永磁体采用钕铁硼n48h制永磁体。
12.进一步地,软磁体为q235型钢体。
13.进一步地,u型保护套为高密度聚乙烯制保护套。
14.进一步地,在软磁体的裸露面上对称开设有两个导磁孔。
15.进一步地,环形柔性垫圈为高密度eva泡棉制环形垫圈。
16.进一步地,安装架体为一内设有空腔的封闭盒体,其上设有便于拆装的上盖。
17.进一步地,该用于接收船舶压载水的爬壁机器人还包括电控机构,其包括设置在安装架体内的远程控制器和蓄电池;远程控制器分别与环形电磁铁、若干个电动推杆以及两个驱动电机电连接;蓄电池与远程控制器连接以供电。
18.与现有技术相比,该用于接收船舶压载水的爬壁机器人可以灵活地适配不同船体情况,在不同位置、不同条件下实现对船舶压载水排放口的对接;无需考虑船舶压载水排放口的尺寸不统一以及位置过高不易对接的问题,通过磁力爬壁机构实现在船体侧面自由移动,并在移动至压载水排放口位置处通过可伸缩管道接头实现紧密贴合压载水排出口,进而完成岸上压载水储存箱对船舶压载水的回收,在船舶压载水岸基接收领域具有很好的推广应用前景。
附图说明
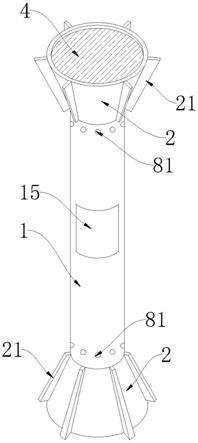
19.图1为本实用新型的用于接收船舶压载水的爬壁机器人的结构示意图;
20.图2为本实用新型的用于接收船舶压载水的爬壁机器人的侧视图;
21.图3为本实用新型的用于接收船舶压载水的爬壁机器人的磁力爬壁机构的侧视图;
22.图4为本实用新型的用于接收船舶压载水的爬壁机器人的磁力爬壁机构的履带板的剖视结构示意图;
23.图5为本实用新型的用于接收船舶压载水的爬壁机器人的管道伸缩机构的结构示意图。
具体实施方式
24.下面结合附图及具体实施例对本实用新型做进一步的说明,但下述实施例绝非对本实用新型有任何限制。
25.如图1和图2所示,该用于接收船舶压载水的爬壁机器人包括设置在安装架体1上的磁力爬壁机构、可伸缩管道接头和电控机构;其中,
26.安装架体1为一内部设有空腔的立方形密封盒体,盒体上设有便于拆装的上盖,以便使用前进行调试和检修;该安装架体1由非磁性金属(如不锈钢)制成;
27.如图3所示,磁力爬壁机构包括对称设置在安装架体1左、右两侧侧壁处的两组移动机构和设置在安装架体1内的两台驱动电机5;具体地,
28.每组移动机构包括一条环形履带2和对称设置在环形履带2内两侧的履带驱动轮3和张紧调节装置4;两台驱动电机5以其输出轴朝向同侧履带驱动轮3的方式对称地固定在安装架体1内侧;其中,
29.履带2为由平行设置的双链条2a将等间距且呈一字排列的若干块履带板2b 串联而成的环形带体;如图4所示,各履带板2b均采用特制的磁力履带板,其由两块永磁体2b-1、一块软磁体2b-2、一个永磁体保护套2b-3和一个环形铝框 2b-4构成;其中,两块永磁体2b-1并列设置,并居中叠放设置于软磁体2b-2上;永磁体保护套2b-3为一轴向截面为u形的外套,其倒置设置并完全套装在两块永磁体2b-1的外侧,以保护永磁铁不受损;环形铝框2b-4套装并紧箍在两块永磁体2b-1及软磁体2b-2的外侧,以将二者连同永磁体保护套2b-3连接固定为一个整体;具体地,永磁体2b-1采用钕铁硼n48h制成,使其能够产生足够的磁通量;软磁体2b-2采用能够引导磁通量的q235型钢制成;u型保护套2b-3采用高密度聚乙烯制成,不仅能够保护永磁体材料受损还可以避免履带片运行过程中出现打滑的现象。
30.将具有上述结构的若干块履带板2b组装为履带2时,其上永磁体保护套2b-3 裸露面为与船体相接触的一面,即爬壁面;位于该爬壁面的对侧为软磁体2b-2 的裸露面;
31.作为本实施例的一个优选技术方案,在软磁体2b-2的裸露面上对称开设有两个通孔,作为导磁孔2b-5,以使永磁体2b-1的磁力线集中,更好发挥其自身的磁吸力作用;
32.两个移动机构的履带驱动轮3设置在安装架体1的后侧,对应地,两台驱动电机5也设置在安装架体1的内腔后侧,且各驱动电机5的输出轴的中轴线与同侧履带驱动轮3中心孔的中轴线重合,使各驱动电机5的输出轴通过联轴器与设置在同侧履带驱动轮3中心孔内的传动轴相连接,以利用驱动电机5驱动履带驱动轮3转动;各履带驱动轮3的轮体外缘上设有与履带2上相邻两块履带板2b 的间距相适应的轮齿,使履带驱动轮3能够与履带2啮合,在履带驱动轮3的转动过程中,同步卷绕履带2运转,进而带动安装架体1整体移动;具体地,驱动电机5采用微型伺服电机;
33.两个移动机构的张紧调节装置4设置在安装架体1的前侧;如图3所示,张紧调节装置4包括支撑轮4a、固定块4c和调节杆4b;其中,调节杆4b为由短杆和长杆一体成型形成的l形杆体,其长杆呈水平状态设置在安装架体1外侧,其短杆垂直于支撑轮4a的轮面设置并通过安装在短杆杆端的滚动轴承装配在支撑轮4a的中心孔内,使支撑轮4a能够相对于调节杆4b自由转动;固定块4c为内侧尺寸与调节杆4b的长杆尺寸相适应的u形结构,且其两端分别向外侧延伸形成有固定翼,使调节杆4b的长杆杆端设置在固定块4c的u形结构内侧,并通过设置在固定块4c两侧固定翼上的紧固螺栓将固定块4c和调节杆4b固定在安装架体1的侧壁
上,同时通过在水平方向上调节调节杆4b的长杆相对于固定块 4c的位置,实现支撑轮4a与履带驱动轮3之间的间距调节,进而实现调节履带松紧度的调节;
34.如图5所示,可伸缩管道接头6包括环形电磁铁6a、若干根电动推杆6b、环形柔性垫圈6c、管道连接器6d和不锈钢波纹管6e;其中,
35.环形电磁铁6a、不锈钢波纹管6e和管道连接器6d同轴设置,环形电磁铁 6a套装并焊接固定在不锈钢波纹管6e的前端外壁上,且其外侧环形面与不锈钢波纹管6e的前端端面齐平,管道连接器6d插装并焊接固定在安装架体1的顶板中心开孔处,其一端焊接固定在不钢波纹管6e的后端端面上、另一端管位于安装架体1的外侧,以通过管道连接器6d与外部的输水管6f的管端连接并形成连通;该环形电磁铁6a通过通电和断电实现消磁和充磁,其中,充磁状态下,环形电磁铁6a与船体之间产生磁力,以保证在压载水排出过程中,接收管路与船体紧密贴合;
36.若干根电动推杆6b以其轴线平行于不锈钢波纹管6e的方式环绕不锈钢波纹管6e均布设置;每根电动推杆6b的底座固定在管道连接法兰盘6d边缘的非开孔位置处、推杆杆端固定在环形电磁铁6a的内侧环形面上,使环形电磁铁6a能够随若干根电动推杆6b伸长而自安装架体1的底板中心开孔伸出安装架体1外侧;初始状态下,不锈钢波纹管6e和电动推杆6b均呈收缩状态,与船体压载水排放口对接时,电动推杆6b的推杆带动不锈钢波纹管6e逐渐伸长至环形电磁铁 6a与船体对接;
37.环形柔性垫圈6c套装并固定在环形电磁铁6a的内壁上,其轴向长度大于环形电磁铁6a的轴向长度,使其能够完全覆盖在环形电磁铁6a的内壁上,且前端露出至环形电磁铁6a外侧,以保证环形柔性垫圈6c先于环形电磁铁6a与船体对接,当环形柔性垫圈6c被压缩并与船体紧密接触后,环形电磁铁6a才与船体接触,避免船体排放的压载水与环形电磁铁6a接触;具体地,环形柔性垫圈6c 采用高密度eva泡棉制成,具有柔韧、防水、富有弹性等特点,可以有效阻隔电磁铁与排水接触;
38.电控机构7包括设置在安装架体1内的远程控制器和蓄电池;远程控制器分别与环形电磁铁6a、若干个电动推杆6b以及两个微型伺服电机5电连接,以实现通过远程控制的方式控制环形电磁铁6a的通电状态,以及两个微型伺服电机5 的驱动轴的转动速度;蓄电池与远程控制器连接,以为各用电部件供电。
39.该用于接收船舶压载水的爬壁机器人的使用方法如下:
40.当需要对靠岸船舶的压载水进行接收时,现场人员将该用于接收船舶压载水的爬壁机器人置于船体上,其在履带板磁吸力的作用下固定在船体上;接着,现场人员通过现场设备如平板电脑与其远程控制器进行远程连接,以控制两个微型伺服电机5驱动履带运转,带动机器人朝向船舶压载水排放口移动;在该过程中可以选择性地通过控制两个微型伺服电机的以二者转动速度存在差异的方式完成转弯路径;当机器人运动至其可伸缩管道接头与船舶压载水排放口相对应的位置处时,现场人员通过现场设备控制远程控制器为环形电磁铁通电,同时启动若干个电动推杆同步伸长推杆部,使环形电磁铁与船舶压载水排放口外周的船体对接,并在电磁力的作用下将环形电磁铁稳定固定在船体上;此时,即可开启船舶压载水排放口的阀门,进行排水作业,而船舶压载水通过该用于接收船舶压载水的爬壁机器人将压载水连通至外部的输水管中并进一步运输至岸上的压载水回收箱内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。