1.本实用新型涉及垃圾桶技术领域,尤其涉及一种智能垃圾桶。
背景技术:
2.垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器。多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起袋丢掉。垃圾桶是人们生活中“藏污纳垢”的容器,也是社会文化的一种折射,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启,家居的垃圾桶多数放于厨房,以便放置厨余,有些家庭会在主要房间都各置一,有些游乐场的垃圾桶会特别设计成可爱的人物。
3.现有的室外垃圾桶在使用时不能实现垃圾自动分类,需要人手动对其进行垃圾分类,操作繁琐,而且分类效果差,部分人不愿意进行垃圾分类,而造成乱扔乱放的问题,所以我们提出一种智能垃圾桶,用以解决上述所提到的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种智能垃圾桶。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种智能垃圾桶,包括框架,所述框架的顶部固定连接有挡板,所述挡板的内部设置有高亮显示屏,所述挡板上开设有垃圾投入口,所述框架的底部设置有多个垃圾储存箱,所述框架的内壁滑动连接有升降板,所述升降板上设置有双舵机倾倒平台,所述框架的一侧内壁设置有用于调节双舵机倾倒平台高度的升降组件,所述框架的顶部滑动连接有第一滑动块和第二滑动块,所述第一滑动块和第二滑动块之间固定连接有同一个滑轨,所述滑轨上滑动连接有滑块,所述滑块的底部固定连接有柔性三指机械爪,所述框架的顶部设置有用于调节柔性三指机械爪位置的调节组件。
7.优选地,所述升降组件包括固定连接在框架一侧内壁的第二伺服电机,所述第二伺服电机的输出轴固定连接有螺纹杆,所述螺纹杆贯穿升降板并与升降板螺纹连接。
8.优选地,所述调节组件包括固定连接在框架顶部的第一固定支架和第二固定支架,所述框架的顶部固定连接有对称设置的两个安装板,所述第一固定支架的底部固定连接有第三伺服电机,所述第二固定支架的底部固定连接有第一伺服电机,所述第三伺服电机的输出轴上和靠近第一固定支架的安装板内部均设置有第一同步轮,两个所述第一同步轮上套设有同一个第二同步带,所述第二同步带的两端分别与第一滑动块的两侧固定连接,所述第一伺服电机的输出轴上和靠近第一伺服电机的安装板内以及滑轨的两侧均设置有第二同步轮,多个所述第二同步轮上套设有同一个第一同步带,所述第一同步带的两端分别与滑块的两侧固定连接。
9.优选地,所述安装板的一侧螺纹贯穿连接有螺栓,两个所述螺栓的一端分别与两个安装板内部的第一同步轮和第二同步轮的一侧转动连接。
10.优选地,所述框架的内部设置有摄像头。
11.优选地,所述垃圾储存箱上设置有压力传感器。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型中,垃圾从垃圾投入口投入双舵机倾倒平台上,双舵机倾倒平台上的压力传感器检测到有压力示数,利用摄像头获取图像,ai识别垃圾系统在后台进行ai识别垃圾,若识别失败,则控制双舵机倾倒平台将垃圾投入“其他垃圾”垃圾桶,同时上传云端,结束本轮检测,进入下轮投放;
14.2、本实用新型中,若识别成功,则判断垃圾种类是否单一,若为同类垃圾,则控制双舵机倾倒平台将垃圾投入对应的垃圾桶,结束本轮检测,进入下轮投放,若为不同类的垃圾,则控制柔性三指机械爪抓取最近的一种垃圾,对该种垃圾进行检测,投入相应的垃圾桶;
15.3、本实用新型中,此时根据不同垃圾的高度和大小,启动第二伺服电机,第二伺服电机的输出轴带动螺纹杆转动,螺纹杆带动升降板在竖直方向上移动,进而可以方便柔性三指机械爪夹取,为了方便柔性三指机械爪夹取垃圾,会启动第三伺服电机,第三伺服电机的输出轴带动第一同步轮转动进而带动第二同步带转动,第二同步带带动第一滑动块纵向移动,进而带动滑轨纵向移动,滑轨带动滑块和柔性三指机械爪纵向移动,调节柔性三指机械爪的位置;
16.4、本实用新型中,启动第一伺服电机,第一伺服电机的输出轴带动第二同步轮转动,第二同步轮带动第一同步带转动,进而带动滑块横向移动,进而滑块带动柔性三指机械爪横向移动,便于柔性三指机械爪在横向和纵向两个方向水平移动,更加方便的夹取各个位置的垃圾,直至所有垃圾都被投入对应的垃圾桶后为止,结束本轮检测,进入下轮投放。
17.本实用新型结构简单,通过双舵机倾倒平台自动将垃圾倒入相对应的垃圾内,在垃圾较多且不为同类垃圾时,通过柔性三指机械爪夹取垃圾投入相应的垃圾桶内,同时通过升降组件和调节组件不断调整双舵机倾倒平台的高度和柔性三指机械爪的位置,便于夹取垃圾,使用方便。
附图说明
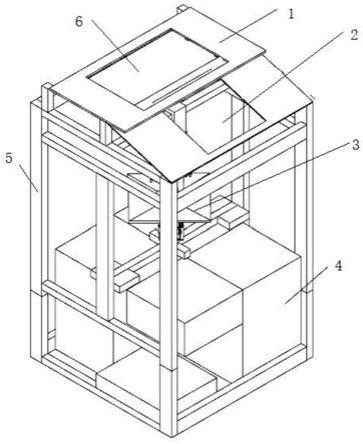
18.图1为本实用新型提出的一种智能垃圾桶的三维图;
19.图2为本实用新型除去挡板后第一视角的三维图;
20.图3为本实用新型除去挡板后第二视角的三维图;
21.图4为本实用新型中第一同步带和第二同步带的安装示意图;
22.图5为本实用新型的工作流程图。
23.图中:1、挡板;2、垃圾投入口;3、双舵机倾倒平台;4、垃圾储存箱;5、框架;6、高亮显示屏;7、第一固定支架;8、第一滑动块;9、第二固定支架;10、第二滑动块;11、安装板;12、螺栓;13、滑轨;14、滑块;15、第一伺服电机;16、柔性三指机械爪;17、第二伺服电机;18、升降板;19、螺纹杆;20、第一同步带;21、第三伺服电机;22、第二同步带;23、第一同步轮;24、第二同步轮。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
25.实施例一
26.参照图1-5,一种智能垃圾桶,包括框架5,框架5的顶部固定连接有挡板1,挡板1的内部设置有高亮显示屏6,挡板1上开设有垃圾投入口2,框架5的底部设置有多个垃圾储存箱4,框架5的内壁滑动连接有升降板18,升降板18上设置有双舵机倾倒平台3,框架5的一侧内壁设置有用于调节双舵机倾倒平台3高度的升降组件,框架5的顶部滑动连接有第一滑动块8和第二滑动块10,第一滑动块8和第二滑动块10之间固定连接有同一个滑轨13,滑轨13上滑动连接有滑块14,滑块14的底部固定连接有柔性三指机械爪16,框架5的顶部设置有用于调节柔性三指机械爪16位置的调节组件。
27.实施例二
28.参照图1-5,一种智能垃圾桶,包括框架5,框架5的顶部固定连接有挡板1,挡板1的内部设置有高亮显示屏6,挡板1上开设有垃圾投入口2,框架5的底部设置有多个垃圾储存箱4,框架5的内壁滑动连接有升降板18,升降板18上设置有双舵机倾倒平台3,框架5的一侧内壁设置有用于调节双舵机倾倒平台3高度的升降组件,升降组件包括固定连接在框架5一侧内壁的第二伺服电机17,第二伺服电机17的输出轴固定连接有螺纹杆19,螺纹杆19贯穿升降板18并与升降板18螺纹连接,用于调整双舵机倾倒平台3的高度,框架5的顶部滑动连接有第一滑动块8和第二滑动块10,第一滑动块8和第二滑动块10之间固定连接有同一个滑轨13,滑轨13上滑动连接有滑块14,滑块14的底部固定连接有柔性三指机械爪16,框架5的顶部设置有用于调节柔性三指机械爪16位置的调节组件,调节组件包括固定连接在框架5顶部的第一固定支架7和第二固定支架9,框架5的顶部固定连接有对称设置的两个安装板11,第一固定支架7的底部固定连接有第三伺服电机21,第二固定支架9的底部固定连接有第一伺服电机15,第三伺服电机21的输出轴上和靠近第一固定支架7的安装板11内部均设置有第一同步轮23,两个第一同步轮23上套设有同一个第二同步带22,第二同步带22的两端分别与第一滑动块8的两侧固定连接,第一伺服电机15的输出轴上和靠近第一伺服电机15的安装板11内以及滑轨13的两侧均设置有第二同步轮24,多个第二同步轮24上套设有同一个第一同步带20,第一同步带20的两端分别与滑块14的两侧固定连接,用于调节柔性三指机械爪16位置的调节组件,便于柔性三指机械爪16抓取垃圾,安装板11的一侧螺纹贯穿连接有螺栓12,两个螺栓12的一端分别与两个安装板11内部的第一同步轮23和第二同步轮24的一侧转动连接,用于在拆卸装置时,可以利用转动螺栓12,进而调整第一同步轮23和第二同步轮24的位置,使得第一同步带20和第二同步带22松动,便于取下第一同步带20和第二同步带22。
29.工作原理:垃圾从垃圾投入口2投入双舵机倾倒平台3上,双舵机倾倒平台3上的压力传感器检测到有压力示数,利用摄像头获取图像,后台ai识别垃圾,若识别失败,则控制双舵机倾倒平台3将垃圾投入“其他垃圾”垃圾桶,同时上传云端,结束本轮检测,进入下轮投放,若识别成功,则判断垃圾种类是否单一,若为同类垃圾,则控制双舵机倾倒平台3将垃圾投入对应的垃圾桶,结束本轮检测,进入下轮投放,若为不同类的垃圾,则控制柔性三指
机械爪16抓取最近的一种垃圾,对该种垃圾进行检测,投入相应的垃圾桶,此时根据不同垃圾的高度和大小,启动第二伺服电机17,第二伺服电机17的输出轴带动螺纹杆19转动,螺纹杆19带动升降板18在竖直方向上移动,进而可以方便柔性三指机械爪16夹取,为了方便柔性三指机械爪16夹取垃圾,会启动第三伺服电机21,第三伺服电机21的输出轴带动第一同步轮23转动进而带动第二同步带22转动,第二同步带22带动第一滑动块8纵向移动,进而带动滑轨13纵向移动,滑轨13带动滑块14和柔性三指机械爪16纵向移动,调节柔性三指机械爪16的位置,启动第一伺服电机15,第一伺服电机15的输出轴带动第二同步轮24转动,第二同步轮24带动第一同步带20转动,进而带动滑块14横向移动,进而滑块14带动柔性三指机械爪16横向移动,便于柔性三指机械爪16在横向和纵向两个方向水平移动,更加方便的夹取各个位置的垃圾,直至所有垃圾都被投入对应的垃圾桶后为止,结束本轮检测,进入下轮投放。
30.其中双舵机倾倒平台3、高亮显示屏6、第一伺服电机15、柔性三指机械爪16、第二伺服电机17、第三伺服电机21、ai识别垃圾系统、摄像头均为现有技术,其构造及机理均是本技术领域公知的常识,ai识别垃圾系统与摄像头配合识别垃圾类型的原理也为现有技术,本技术不再赘述。
31.本发明中,垃圾分类机构分为目标识别模块、分拣模块、语音控制模块、满载检测模块、垃圾压缩模块。
32.目标识别模块为ai识别垃圾系统,自建垃圾数据库,主控运行yolov5算法进行目标检测,yolo训练过程中,用mosaic数据增强、自适应锚框计算、label smoothing平滑、giou_loss、学习率余弦退火衰减、nms非极大值抑制等技巧使得模型识别精度和置信度达到90%以上,训练速度提升75%。
33.分拣模块通过双舵机倾倒平台3、第一伺服电机15、柔性三指机械爪16、第二伺服电机17、第三伺服电机21等结构配合实现。
34.分拣平台固定在舵机上可实现三个维度的运动,分拣平台下方设有多个垃圾储存箱,分拣平台上方设有带有仿生柔性机械爪龙门架结构,分拣平台与龙门架结构可以实现xyz三个维度的运动,完成垃圾的分拣,仿生柔性机械爪设置有距离传感器,对于垃圾的定位,我们提取垃圾识别框的xy轴的最大坐标,计算出垃圾识别框的中心位置点坐标作为定位点,将机械爪对准中心点进行抓取,并且利用距离传感器确定z轴的距离,当传感器检测到垃圾到达一定高度时就夹取,将定位从三维降低至二维,通过这个方法实现yolov5与机械臂控制算法之间的连接与定位,准确无误的抓取每一样垃圾。
35.本发明中还可以设置满载检测模块,满载检测通过激光测距传感器实现。
36.本发明中还可以设置有语音识别模块,语音识别模块将声音信号转化为字符串并通过串口发送到arduino开发板,arduino处理信号并发送到主控,再由主控控制舵机转动。
37.本发明中还可以设置垃圾压缩模块,垃圾压缩模块通过固定在可回收垃圾箱壁上的电动推杆实现。
38.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。