1.本技术涉及缓冲吸能技术领域,特别地,涉及一种摩擦诱导的双稳态缓冲吸能单元、多稳态缓冲吸能结构。
背景技术:
2.缓冲吸能的目的在于减小着陆冲击并加强各部位的抗冲击性能,避免内部器件受到损伤,目前的缓冲吸能结构主要分为一次性使用和可重复使用两类。泡沫、金属、陶瓷等通过塑性变形或破坏,或者通过引入人为缺陷例如折纸的预折叠,从而控制结构变形模式,获得预期的吸能特性。塑性变形或结构破坏的吸能原理为材料分子层面上的位错或键断裂,吸能密度很高,但由于材料永久性损坏只能一次性使用,无法满足对缓冲吸能特性循环使用的需求。而目前利用双稳态实现的可重复使用缓冲吸能设计中,往往是通过弹性势能的局部极小值实现的,例如两端受约束的曲梁,其中,构型的稳定态只能在系统的弹性势能局部极小点实现,该要求严格限制了构型稳定态的个数与实现方式,在很大程度上缩减了缓冲吸能结构的设计阈。
技术实现要素:
3.本技术实施例提供了一方面提供了一种摩擦诱导的双稳态缓冲吸能单元,以解决现有缓冲吸能装置无法循环使用、缓冲吸能结构的设计阈受到限制的技术问题。
4.本技术采用的技术方案如下:
5.一种摩擦诱导的双稳态缓冲吸能单元,包括:
6.三个圆柱体,所述三个圆柱体为刚性体,直径和长度均相同,轴线相互平行;
7.弹性带,所述弹性带套设在所述三个圆柱体外,为所述三个圆柱体提供一定的预紧力,使三个圆柱体保持紧贴并具有第一稳定状态和第二稳定状态,其中,第一稳定状态时,所述三个圆柱体的轴线分别经过同一等边三角形的顶点处,第二稳定状态时,所述三个圆柱体的轴线位于同一平面内。
8.进一步地,所述三个圆柱体的圆柱面上相应地设置有与所述弹性带相匹配的环形凹槽。
9.进一步地,所述弹性带的初始预紧力、弹性带刚度、三个圆柱体的圆柱面摩擦系数的大小与所述双稳态缓冲吸能单元受到碰撞力时的能量吸收大小成正比。
10.进一步地,给定所述三个圆柱体的圆柱面摩擦系数、弹性带刚度、弹性带初始预紧力,则所述摩擦诱导的双稳态缓冲吸能单元在有摩擦情况下能承受的归一化的竖直方向外力为:
[0011][0012]
μ为圆柱面摩擦系数,为无摩擦情况下归一化的竖直方向外力:
[0013][0014]
其中,f(θ)为假设圆柱体、弹性带与地面之间无摩擦时作用在摩擦诱导的双稳态缓冲吸能单元上竖直原始外力:
[0015]
f(θ)=2tanθ(to kδ)
[0016]
r为刚性圆柱体半径,k为弹性带刚度,to为弹性带初始预紧力,归一化的弹性带初始预紧力δ为弹性带伸长量,归一化的弹性带伸长量
[0017]
本技术另一方面提供了一种多稳态缓冲吸能结构,包括:
[0018]
若干所述的双稳态缓冲吸能单元,所述双稳态缓冲吸能单元周期性地层叠排列,构成正交层合结构。
[0019]
进一步地,所述多稳态缓冲吸能结构包括至少两层,每层包含至少两个平行放置的双稳态缓冲吸能单元,相邻两层的双稳态缓冲吸能单元呈空间正交关系。
[0020]
进一步地,各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力的大小一样,受到碰撞力后,根据力学多稳态性质可知,整个结构的变形模式为各层依次压缩,但压缩变形的次序存在随机性。
[0021]
进一步地,各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力的大小不一样,受到碰撞力后各层的变形次序是确定的,且根据各层上的双稳态缓冲吸能单元的弹性带刚度与预紧力的大小关系依次变形。
[0022]
进一步地,当各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从下到上依次增大时,受到碰撞力后所述多稳态缓冲吸能结构各层从下到上依次变形;
[0023]
当各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从下到上依次减少时,受到碰撞力后所述多稳态缓冲吸能结构各层从上到下依次变形;
[0024]
当各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从中间到两端依次增大时,受到碰撞力后所述多稳态缓冲吸能结构各层从中间到两端依次变形;
[0025]
当各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从两端到中间依次增大时,受到碰撞力后所述多稳态缓冲吸能结构各层从两端到中间依次变形。
[0026]
本技术具有以下有益效果:
[0027]
本技术一方面提供了一种摩擦诱导的双稳态缓冲吸能单元,包括三个直径相同的圆柱体、套设在所述三个圆柱体外为所述三个圆柱体提供一定的预紧力的弹性带。本技术将刚性材料和弹性部件相结合,并通过借助结构的内摩擦,设计了含摩擦的双稳态单元,该单元无论在系统处于弹性势能的局部极小值,还是处于弹性势能的局部最大值,均能实现稳定的力学平衡状态,内摩擦的引入可以在很大程度上扩展稳定平衡的设计域;受到外力时,本技术可将一部分外力功转化为弹性部件的弹性势能,另一部分外力功被摩擦耗散,无需依靠圆柱体的塑性变形或破坏缓冲吸能,避免了圆柱体本身的材料损伤,可多次重复使用,提高了使用寿命可靠性,结构简单、加工方便成本低。另外,本技术可通过对各部分的几何参数和材料力学参数的调节,方便地实现力—位移曲线、吸能总量以及稳态特性等力学行为的可调节,调节灵活方便,满足不同工况下对吸能特性的要求,适用性广。
[0028]
本技术另一方面提供了一种多稳态缓冲吸能结构,该结构由若干所述双稳态缓冲吸能单元周期性地层叠排列,构成正交层合结构。本技术多稳态缓冲吸能结构通过正交层
合多个双稳态缓冲吸能单元,由于每个双稳态单元在初始构型和完全压缩构型下均是稳定的,因此由多个双稳态缓冲吸能单元阵列而成的多层结构则具有多个稳定构型,进一步扩展了稳定构型的数量,保证了较长的工作距离,使多稳态缓冲吸能结构具有较强的能量吸收能力。
[0029]
本技术可以实现机器人的柔顺接触与缓冲吸能效果,为弹跳、抛投与抗跌落等软体机器人抗跌落及软接触提供设计支撑。此外,本技术可作为传感器或电子元器件的隔振缓冲装置,改善为电子元器件等所处的力学环境,拓宽精密设备的工作环境。
[0030]
除了上面所描述的目的、特征和优点之外,本技术还有其它的目的、特征和优点。下面将参照附图,对本技术作进一步详细的说明。
附图说明
[0031]
构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
[0032]
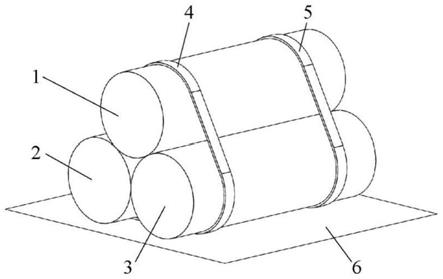
图1是本技术优选实施例的摩擦诱导的双稳态缓冲吸能单元的初始构型示意图。
[0033]
图2是本技术优选实施例的摩擦诱导的双稳态缓冲吸能单元的压缩构型示意图。
[0034]
图3是本技术另一优选实施例的摩擦诱导的双稳态缓冲吸能单元的初始构型示意图。
[0035]
图4是本技术另一优选实施例的摩擦诱导的双稳态缓冲吸能单元的压缩构型示意图。
[0036]
图5是本技术优选实施例的双稳态缓冲吸能单元的位移-弹性势能曲线关系示意图。
[0037]
图6是本技术优选实施例的双稳态缓冲吸能单元加载过程和卸载过程中的力-位移曲线关系示意图。
[0038]
图7是本技术优选实施例的双稳态缓冲吸能单元变形示意图。
[0039]
图8是本技术优选实施例的双稳态缓冲吸能单元考虑摩擦时的受力分析示意图。
[0040]
图9是本技术优选实施例的双稳态缓冲吸能单元的不同的初始预紧力对力-位移曲线的影响示意图。
[0041]
图10是本技术优选实施例的双稳态缓冲吸能单元的不同的摩擦系数对力-位移曲线的影响示意图。
[0042]
图11是本技术优选实施例的多稳态缓冲吸能结构处于初始态时的结构示意图。
[0043]
图12是本技术优选实施例的多稳态缓冲吸能结构处于最终压缩态时的结构示意图。
[0044]
图13是本技术优选实施例的多稳态缓冲吸能结构加载过程和卸载过程中的锯齿形力-位移曲线关系示意图。
[0045]
图14是本技术优选实施例的多稳态缓冲吸能结构在具有不同弹性带刚度的弹性带约束时,加载过程和卸载过程中不同的锯齿形力-位移曲线关系示意图。
[0046]
图15是本技术优选实施例的两列八层的多稳态缓冲吸能结构在各层采用相同或不同刚度、初始预紧力的弹性带约束时,加载过程和卸载过程中的锯齿形力-位移曲线关系示意图。
[0047]
图16是本技术另一优选实施例的多稳态缓冲吸能结构处于初始态时的结构示意图。
[0048]
图17是本技术另一优选实施例的多稳态缓冲吸能结构处于最终压缩态时的结构示意图。
[0049]
图中:1、第一圆柱体;2、第二圆柱体;3、第三圆柱体;4、第一弹性带;5、第二弹性带;6、水平面;7、环形凹槽。
具体实施方式
[0050]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
[0051]
参照图1和图2,本技术的优选实施例提供了一种摩擦诱导的双稳态缓冲吸能单元,包括:
[0052]
三个圆柱体,所述三个圆柱体均为刚性体,包括第一圆柱体1、第二圆柱体2、第三圆柱体3,所述三个圆柱体的直径和长度均相同,轴线相互平行;
[0053]
弹性带,所述弹性带套设在所述三个圆柱体外,为所述三个圆柱体提供一定的预紧力,使三个圆柱体保持紧贴并具有第一稳定状态和第二稳定状态,其中,第一稳定状态时,所述三个圆柱体的轴线分别经过同一等边三角形的顶点处,第二稳定状态时,所述三个圆柱体的轴线位于同一平面内。
[0054]
所述双稳态缓冲吸能单元由被弹性带4约束的三个刚性的圆柱体组成,构成圆柱—弹性带双稳态单元。其中,刚性的圆柱体包括第一圆柱体1、第二圆柱体2、第三圆柱体3,弹性带包含第一弹性带4和第二弹性带5,所述双稳态缓冲吸能单元水平放置在水平面6上。其中,各圆柱体的半径为r,各弹性带均可拉伸,各圆柱体近似视为刚体。
[0055]
本实施例的双稳态缓冲吸能单元包括三个直径相同的圆柱体、套设在所述三个圆柱体外为所述三个圆柱体提供一定的预紧力的弹性带。本技术将刚性材料和弹性部件相结合,并通过借助结构的内摩擦,设计了含摩擦的双稳态单元,该单元无论在系统处于弹性势能的局部极小值,还是处于弹性势能的局部最大值,均能实现稳定的力学平衡状态,内摩擦的引入可以在很大程度上扩展稳定平衡的设计域;受到外力时,本技术可将一部分外力功转化为弹性部件的弹性势能,另一部分外力功被摩擦耗散,无需依靠圆柱体的塑性变形或破坏缓冲吸能,避免了圆柱体本身的材料损伤,可多次重复使用,提高了使用寿命可靠性,结构简单、加工方便成本低。另外,本实施例可通过对各部分的几何参数和材料力学参数的调节,方便地实现力—位移曲线、吸能总量以及稳态特性等力学行为的可调节,调节灵活方便,满足不同工况下对吸能特性的要求,适用性广。
[0056]
图1是本实施例的摩擦诱导的双稳态缓冲吸能单元的初始构型,在第一圆柱体1上施加一个竖直向下的外力f,第一圆柱体1不断向下运动并嵌在第二圆柱体2、第三圆柱体3之间。随着外力的施加,弹性带不断伸长,第一圆柱体1不断下降,第二圆柱体2、第三圆柱体3向两侧分开,最终的压缩构型如图2所示,此时三个圆柱体位于同一水平面6内,弹性带被拉伸到最大长度。
[0057]
如图3和图4所示,在本技术的优选实施例中,所述三个圆柱体的圆柱面上相应地设置有与所述弹性带相匹配的环形凹槽7。
[0058]
本实施例中,三个圆柱体的圆柱面上相应地设置有与所述弹性带相匹配的环形凹槽7,第一弹性带4和第二弹性带5嵌入在环形凹槽7内,从而确保第一弹性带4和第二弹性带5的位置稳定,不会再使用过程中受到震动等外力作用下沿圆柱体的轴向发生移动,确保双稳态缓冲吸能单元的稳定性和可靠性。
[0059]
从能量角度分析,从初始构型到最终压缩构型转变的过程中,所述双稳态缓冲吸能单元的弹性势能如图5所示。可以看出,所示双稳态缓冲吸能单元的弹性势能不断增加。初始构型对应于弹性势能的最小值,末态压缩构型对应于弹性势能的最大值。
[0060]
如果圆柱表面光滑无摩擦,则所述双稳态缓冲吸能单元有且仅有一个稳定的平衡构型,即最小势能构型,该情况下外力f卸载后单元会自回复到初始构型,因此加载过程和卸载过程的力-位移曲线是可逆的。然而,如果圆柱体之间存在摩擦,加载过程和卸载过程的力-位移曲线则如图6示。此时初始构型和压缩构型均为稳定的平衡构型,若要从压缩构型切换到初始构型,需要施加一个竖直向上的外力来克服摩擦力,此时加载和卸载过程的力-位移曲线不再重合,输入能量一部分以弹性势能的形式存储在弹性带中,另一部分被圆柱体之间的摩擦耗散。
[0061]
本实施例可通过改变弹性带初始预紧力以及摩擦系数等,进而实现对双稳态缓冲吸能单元力学性能的调控。
[0062]
以图7为例,首先通过解析法计算加载和卸载过程中的力-位移曲线。我们首先对双稳态缓冲吸能单元进行静力学分析,假设圆柱体、弹性带与地面之间无摩擦。在这种情况下,整个弹性带内的张力是均匀分布的。几何分析表明,单元变形量(位移)u表示为弹性带的伸长量表示为δ(θ)=2r(2cosθ-1),其中θ为圆柱体倾角,r圆柱体半径,若将弹性带视为线弹性变形,其刚度为k,初始预紧力为t0,则弹性势能可表示为v(δ)=t0δ kδ2/2。无摩擦时,外力做的功均以弹性势能形式存储在弹性带中,此时外力f可表示为
[0063][0064]
为方便表述,分别将长度以r为参考进行归一化,力以kr为参考进行归一化,能量以kr2为参考进行归一化,即归一化的长度等于原始长度除以r,归一化的力等于原始力除以kr,归一化的能量等于原始能量除以kr2,此时无摩擦情况下归一化的竖直方向外力为:
[0065][0066]
其中,归一化弹性带张力归一化弹性带伸长量可以看出,弹性带的最大伸长发生在θ=0处,对应于弹性势能的最大值
[0067]
下面采用受力分析方法,考虑摩擦情况下竖直方向的外力,如图8所示。其中,外力f
μ
竖直向下作用于该结构上,t1和t2分别为弹性带的张力,n和fn为上方圆柱和左下圆柱体之间的正压力与摩擦力,fc为左下圆柱体与地面之间的摩擦力,f
μ
/2为左下圆柱体与地面之间的正压力。在ξ和η两个方向分别列写左下圆柱体的力平衡方程以及力矩的平衡方程,可得:
[0068][0069]
此外,摩擦力应该满足如下关系:
[0070][0071]
根据式(3),可得:
[0072][0073]
将式(3)中的第3行代入式(3)中的第2行,可得:
[0074][0075]
整理上式,可得:
[0076][0077]
根据式(7)和式(4)的第1行,可得:
[0078]
cosθf
μ
/2-sinθt1≤(sinθ 1)μn
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0079]
将式(5)代入式(8),得到f
μ
的上界,即:
[0080][0081]
在上式中,当上方圆柱体与左下圆柱体发生相对滑动时,得到等号。加载过程中经常出现左下圆柱体逆时针旋转,而上方圆柱体不旋转的情况。因此,只要解出t1,就可以计算出f
μ
。虽然很难得到t1的精确解析解,但可以作粗略估计,假设t1等于在无摩擦情况下橡皮筋的张力,即:
[0082]
t1≈t0 kδ=t0 2kr(2cosθ-1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0083]
将式(10)代入式(9)中,可得到有摩擦情况下归一化的竖直方向外力的近似解如下:
[0084][0085]
其中,为无摩擦情况下归一化的竖直方向外力,μ为圆柱面间摩擦系数。可以看
出,竖直方向外力可视为变形量、初始预紧力与摩擦系数三方面的函数。
[0086]
通过调节弹性带的初始预紧力,可以得到不同的力-位移曲线。如图9所示,归一化后的弹性带的初始预紧力分别选取为0、0.8、2.0,可以看出,预紧力大小直接影响了力-位移曲线的变化趋势。当归一化后的弹性带初始预紧力取0.8时,随着位移的增大,需要施加的竖直方向外力先增大后减小;当归一化后的弹性带初始预紧力取2.0时,随着位移的增大,需要施加的竖直方向外力单调递减。
[0087]
通过调节圆柱体间的摩擦系数,也可以得到不同的力-位移曲线。如图10所示,摩擦系数分别选取为0、0.1、0.2,可以看出,摩擦系数大小也直接影响了力-位移曲线的变化趋势。当摩擦系数取0时,随着位移的增大,需要施加的竖直方向外力先增大后减小;当摩擦系数取0.1或0.2时,随着位移的增大,需要施加的竖直方向外力单调递减。
[0088]
综上,通过对弹性带初始预紧力或者圆柱体间摩擦系数的调节,可以改变双稳态单元的力-位移曲线的幅值。工程实践中,对于缓冲吸能结构,上述调节可以改变吸能总量,例如,当碰撞力较大时,可以增大初始预紧力或者增大圆柱间摩擦系数,从而实现更大的能量吸收效果。
[0089]
如图11和图12所示,本技术另一优选实施例还提供了一种多稳态缓冲吸能结构,包括若干所述的双稳态缓冲吸能单元,所述双稳态缓冲吸能单元周期性地层叠排列,构成正交层合结构,其中,所述多稳态缓冲吸能结构包括八层,每层包含两个平行放置的双稳态缓冲吸能单元,相邻两层的双稳态缓冲吸能单元呈空间正交关系。
[0090]
本实施例将多个双稳态缓冲吸能单元周期性地排列,构成正交层合的多稳态缓冲吸能结构,本实施例以无法自回复的双稳态缓冲吸能单元为例进行周期阵列,共含八层,每层包含两个平行放置的双稳态缓冲吸能单元,每个双稳态缓冲吸能单元在初始构型和完全压缩构型下均是稳定的,因此本实施例由多个双稳态缓冲吸能单元阵列而成的多层结构的多稳态缓冲吸能结构具有多个稳定构型,其初始态如图11所示,最终压缩态如图12所示。
[0091]
对于上述八层的多稳态缓冲吸能结构,施加竖直向下的外载荷,测量位移控制加载模式下,由图13可以看出,得到的力-应变曲线的八个锯齿形峰值表示每一层的双稳态缓冲吸能单元从初始态到完全压缩态的转变。由于各层双稳态缓冲吸能单元的弹性带具有相同的预紧力和刚度,圆柱体之间的摩擦系数也相同,因此所得的力-应变曲线的六个峰值的振幅几乎相同。锯齿形的力-应变曲线在限制峰值力的同时,还保证了较长的工作距离,因此本实施例的多稳态缓冲吸能结构具有较强的能量吸收能力。定量地说,所述力-位移曲线与坐标轴构成的封闭面积就是位移加载模式下的吸能总量。
[0092]
另外,通过改变弹性带的个数、尺寸、预紧力以及刚度等,可实现对缓冲吸能结构的力学行为进行调控。对于上述八层的多稳态缓冲吸能结构,如果各层中双稳态缓冲吸能单元的弹性带刚度均为k,此时锯齿形力峰值较低。如果将各层中双稳态缓冲吸能单元的弹性带刚度增加至2k或3k,相应的锯齿形力峰值会相应增大,具体如图14所示。幅值大小取决于弹性带的刚度与预紧力,这种调幅特性能够很容易地满足不同工况下对吸能特性的要求。当各层采用不同刚度或初始预紧力的弹性带约束时,力-应变曲线则呈现出不同的幅值,具体如图15所示。
[0093]
此外,还可以对各层的变形顺序进行控制,通过交换各层双稳态缓冲吸能单元的位置,在力-应变曲线保持不变的前提下,使各层上所述双稳态缓冲吸能单元的弹性带刚度
与预紧力的大小不一样,即可在受到碰撞力后根据各层上的双稳态缓冲吸能单元的弹性带刚度与预紧力的大小关系依次变形,实现不同的变形序列,例如从下到上、中间到两端、两端到中间等,例如:
[0094]
若要实现受到碰撞力后所述多稳态缓冲吸能结构各层从下到上依次变形,则将各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从下到上依次增大即可。若要实现受到碰撞力后所述多稳态缓冲吸能结构各层从上到下依次变形,则将各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从下到上依次减少即可。若要实现受到碰撞力后所述多稳态缓冲吸能结构各层从中间到两端依次变形,则将各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从中间到两端依次增大即可。若要实现受到碰撞力后所述多稳态缓冲吸能结构各层从两端到中间依次变形,则将各层上所述双稳态缓冲吸能单元的弹性带刚度与预紧力从两端到中间依次增大即可。
[0095]
在上述实施例的基础上,由此拓展,在本技术的另一优选实施例中,所述多稳态缓冲吸能结构包含24层,每层含有4列平行设置的双稳态缓冲吸能单元,此时,所述多稳态缓冲吸能结构初始态构型如图16所示,压缩态构型如图17所示,本实施例的多稳态缓冲吸能结构能够获得更多的稳定构型、更大的能量吸收效果和更长的工作距离。同样地,也可以参考上述实施例的方法对各层的变形顺序进行控制,实现不同的变形序列,例如从下到上、中间到两端、两端到中间等,具体过程不再赘述。
[0096]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。