1.本发明涉及外科护理技术领域,特别涉及神经外科护理用术后手脚恢复机构。
背景技术:
2.神经外科是外科学中的一个分支,是在外科学以手术为主要治疗手段的基础上,应用独特的神经外科学研究方法,研究人体神经系统,如脑、脊髓和周围神经系统,患者在术后由于一般会出现长期卧床现象,这时候为了加快患者手脚的恢复效率,故一般会在病床上设置手脚恢复机构。
3.然而,传统的手脚恢复机构在使用时,虽然部分手部锻炼件的牵引重量可进行调节,但是调节时由于需要通过工具先将多个紧固件拧松取下,然后才能将配重块进行增减调节,从而使得手部锻炼件在调节牵引重量时十分麻烦,而且传统的手脚恢复机构中的脚部锻炼件在使用时,需要患者下床锻炼,且需要通过手部进行支撑,这对于站立不稳的患者来说十分危险。
技术实现要素:
4.有鉴于此,本发明提供神经外科护理用术后手脚恢复机构,其通过手部锻炼件的设置,能够使得手部锻炼件在调节牵引重量时更加便捷,而且通过电动缸、床板和脚部锻炼件的配合,能够使患者在进行脚部锻炼时,无需下床,从而更加安全。
5.本发明提供了神经外科护理用术后手脚恢复机构,具体包括:底座;所述底座上端面前侧呈左右对称状焊接有两根支撑柱,且两根支撑柱上端之间通过转轴转动连接有床板;所述床板前端面上部设置有支撑杆件,且支撑杆件上呈左右对称状设置有两个手部锻炼件,床板下侧设置有脚部锻炼件;所述底座上安装有支撑部;床板前端面下侧开设有矩形通口,且矩形通口内部设置有座块;所述底座上端面后侧焊接有匚字形支杆,且匚字形支杆顶端面设置有缓冲胶片,床板前端面中部设置有绑带,底座上端面前侧通过转轴转动连接有电动缸,且电动缸上的伸缩杆上端通过转轴与床板底端面转动连接;右侧一根支撑柱右端面安装有控制器。
6.可选地,所述座块后端固定连接有矩形滑动块,且矩形滑动块外部滑动连接有矩形滑套,矩形滑套固定安装在矩形通口内部;所述矩形滑动块后端面中心部位转动连接有调节螺杆a,且调节螺杆a外部通过螺纹连接有螺母,螺母通过支架固定连接在矩形滑套后侧。
7.可选地,所述支撑杆件为匚字形杆状结构,且支撑杆件后部两端均设置有燕尾形滑块,支撑杆件后部两端均通过燕尾形滑块滑动连接有一个滑轨,且两个滑轨固定连接在床板前端面上部;每个所述滑轨前端面上下两侧均固定连接有一个矩形限位块,且两个矩形限位块之间转动连接有调节螺杆b;每根调节螺杆b上端均固定连接有一个链轮,且两个链轮之间通过链条传动连接,两根调节螺杆b通过螺纹与支撑杆件后部两端连接,且支撑杆件上呈左右对称状固定镶嵌有四个滑筒。
8.可选地,所述手部锻炼件包括盒体、拉绳、拉手、匚字形支板、顶压板和滑动杆,所述盒体上端面固定连接有一根拉绳,且拉绳另一端固定连接有拉手,每根拉绳分别与支撑杆件上的其中两个滑筒的内部滑动连接,且每根拉绳外部均滑动连接有安装在支撑杆件上的两个滑轮;所述匚字形支板固定连接在盒体前端面,且匚字形支板上滑动连接有四根滑动杆,四根滑动杆后端固定连接有顶压板。
9.可选地,所述手部锻炼件还包括插杆和配重块,所述顶压板后侧固定连接有十根插杆,并且十根插杆后端均贯穿盒体前侧面,四根滑动杆外部位于匚字形支板内侧均套接有弹簧,且四根滑动杆前端设置有提拉板;所述盒体内部前后两侧面均呈均匀状开设有五个条形滑槽,且盒体内部通过条形滑槽滑动连接有配重块,且每个配重块前端面均呈左右对称状开设有两个限位插孔。
10.可选地,当所述配重块安装至盒体内部时,配重块上开设的两个限位插孔将与其中两根插杆后端插接。
11.可选地,所述脚部锻炼件包括支撑板件、传动辊、驱动电机和传动带,所述支撑板件固定连接在床板下端,且支撑板件上端面通过转轴支座转动连接有四根传动辊,四根传动辊外部之间传动连接有传动带,且传动带外周面呈均匀状设置有防滑条纹,前侧一根传动辊右端设置有蜗轮;所述驱动电机安装在支撑板件右端面,且驱动电机上的转轴固定连接有蜗杆,并且蜗杆与蜗轮啮合,驱动电机、电动缸与控制器电性连接。
12.可选地,所述支撑部包括日字型管件、伸缩滑杆、固定板块、螺纹筒、支撑螺杆和支撑板块,所述日字型管件的数量为两个,且两个日字型管件固定连接在底座上端面前后两侧,每根日字型管件内部均滑动连接有两根伸缩滑杆,左侧两根伸缩滑杆和右侧两根伸缩滑杆外端固定连接有两个固定板块,且每个固定板块上端面中部均设置有一个螺纹筒;每个所述螺纹筒内部均通过螺纹连接有一根支撑螺杆,且每根支撑螺杆下端均贯穿固定板块,每根支撑螺杆下端均转动连接有一个支撑板块,且每个支撑板块上端面均焊接有贯穿固定板块的四根竖向导杆,每个支撑板块底端面均设有两个支脚。
13.可选地,所述支撑部还包括带动滑块、齿条和同步齿轮,每个所述日字型管件上端面均开设有两个条形通口,每根伸缩滑杆上端面均焊接有一个带动滑块,且每个带动滑块上端均固定连接有一根齿条,并且带动滑块与日字型管件上的条形通口滑动连接;所述同步齿轮通过转轴转动连接在日字型管件上端面,且同步齿轮与两根齿条啮合。
14.可选地,所述底座底部安装有万向轮,当底座处于固定状态时,支撑板块底端面的支脚下端将与地面接触,且底座底部万向轮将与地面处于分离状态。
15.有益效果根据本发明的各实施例的手脚恢复机构,与传统手脚恢复机构相比,其通过手部锻炼件的设置,能够在需要将手部牵引重量进行调节时,只需将四根滑动杆前端的提拉板向前拉动,使四根滑动杆后端带动顶压板及插杆向前移动,然后将配重块进行增减即可,增减后,再将四根滑动杆前端的提拉板松开即可,松开后,顶压板将在弹簧作用下带动插杆向后移动,从而使插杆后端穿过盒体前侧壁,并插接在配重块上的限位插孔内,从而使配重块在盒体内部得到有效固定作用,且牵引重量的调节过程中,由于无需通过工具先将多个紧固件拧松取下,也能够将配重块进行快速的增减调节,从而使得手部锻炼件在调节牵引重量时更加便捷,而且结构简单,实用性较强。
16.此外,通过电动缸、床板和脚部锻炼件的配合,在脚部锻炼时,通过控制器将驱动电机启动,然后通过驱动电机转轴、蜗杆和蜗轮带动前侧一根传动辊顺时针缓慢转动,从而使传动带进行顺时针传动,然后此时患者将脚部放置到传动带顶部,在传动带顺时针传动过程中,带动患者脚部向后移动,然后患者再将向后移动的脚部抬起后向前移动,从而使得患者的脚部得到有效的锻炼,而且在使用脚部锻炼件时,通过电动缸伸缩杆向外伸出,将床板向前顶起后,从而无需患者下床锻炼,而且无需通过手部进行支撑,从而即使是站立不稳的患者也能够安全的进行脚部锻炼,从而大大提高了本手脚恢复机构的安全性。
17.此外,通过支撑部的设置,当患者需要锻炼时,通过手动将固定板块向外侧拉动,带动支撑板块向外移动,然后在两根齿条与同步齿轮的配合下,使得两侧支撑板块能够同时向外侧移动,然后再通过转动支撑螺杆,使支撑螺杆在螺纹筒内部螺纹作用下向下移动,然后当支撑板块底部支脚与地面接触后,使底座得到有效稳固的支撑作用,从而使得本手脚恢复机构在使用时更加稳定。
附图说明
18.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
19.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
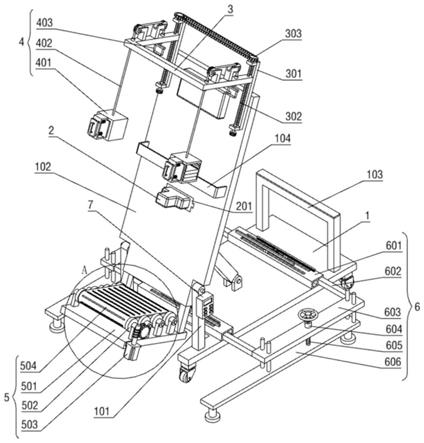
20.在附图中:图1示出了根据本发明的实施例的手脚恢复机构的前部轴视的示意图;图2示出了根据本发明的实施例的手脚恢复机构的后部轴视的示意图;图3示出了根据本发明的实施例的手脚恢复机构的拆分状态下的示意图;图4示出了根据本发明的实施例的座块和矩形滑套拆分后的示意图;图5示出了根据本发明的实施例的支撑杆件和滑轨拆分后的示意图;图6示出了根据本发明的实施例的盒体和匚字形支板拆分后的示意图;图7示出了根据本发明的实施例的盒体和配重块拆分后的示意图;图8示出了根据本发明的实施例的图1中a处局部放大的示意图;图9示出了根据本发明的实施例的支撑部的示意图;图10示出了根据本发明的实施例的图9中b处局部放大的示意图。
21.附图标记列表1、底座;101、支撑柱;102、床板;103、匚字形支杆;104、绑带;105、电动缸;106、矩形通口;2、座块;201、矩形滑动块;202、矩形滑套;203、调节螺杆a;3、支撑杆件;301、滑轨;302、调节螺杆b;303、链轮;304、滑筒;4、手部锻炼件;401、盒体;402、拉绳;403、拉手;404、匚字形支板;405、顶压板;406、滑动杆;407、插杆;408、配重块;5、脚部锻炼件;501、支撑板件;502、传动辊;503、驱动电机;504、传动带;6、支撑部;601、日字型管件;602、伸缩滑杆;603、固定板块;604、螺纹筒;605、支撑螺杆;606、支撑板块;607、带动滑块;608、齿条;609、同步齿轮;7、控制器。
具体实施方式
22.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明
的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
23.实施例:请参考图1至图10:本发明提出了神经外科护理用术后手脚恢复机构,包括:底座1;底座1上端面前侧呈左右对称状焊接有两根支撑柱101,且两根支撑柱101上端之间通过转轴转动连接有床板102;床板102前端面上部设置有支撑杆件3,且支撑杆件3上呈左右对称状设置有两个手部锻炼件4,用于患者手部进行锻炼,床板102下侧设置有脚部锻炼件5,用于患者脚部进行锻炼;底座1上安装有支撑部6;床板102前端面下侧开设有矩形通口106,且矩形通口106内部设置有座块2;底座1上端面后侧焊接有匚字形支杆103,且匚字形支杆103顶端面设置有缓冲胶片,床板102前端面中部设置有绑带104,用于将患者腰部进行绑紧操作,底座1上端面前侧通过转轴转动连接有电动缸105,且电动缸105上的伸缩杆上端通过转轴与床板102底端面转动连接;右侧一根支撑柱101右端面安装有控制器7。
24.此外,根据本发明的实施例,如图1和图4所示,座块2后端固定连接有矩形滑动块201,且矩形滑动块201外部滑动连接有矩形滑套202,矩形滑套202固定安装在矩形通口106内部;矩形滑动块201后端面中心部位转动连接有调节螺杆a203,且调节螺杆a203外部通过螺纹连接有螺母,螺母通过支架固定连接在矩形滑套202后侧,通过座块2的设置,从而能够在患者进行锻炼时,能够通过座块2将患者臀部进行支撑;如图1和图5所示,支撑杆件3为匚字形杆状结构,且支撑杆件3后部两端均设置有燕尾形滑块,支撑杆件3后部两端均通过燕尾形滑块滑动连接有一个滑轨301,且两个滑轨301固定连接在床板102前端面上部;每个滑轨301前端面上下两侧均固定连接有一个矩形限位块,且两个矩形限位块之间转动连接有调节螺杆b302,通过转动调节螺杆b302,使支撑杆件3在螺纹作用下进行上下移动,从而使得手部锻炼件4的高度能够得到灵活调节;每根调节螺杆b302上端均固定连接有一个链轮303,且两个链轮303之间通过链条传动连接,通过链轮303与链条的配合,从而使得在转动一根调节螺杆b302的同时,能够带动另一根调节螺杆b302一同转动,两根调节螺杆b302通过螺纹与支撑杆件3后部两端连接,且支撑杆件3上呈左右对称状固定镶嵌有四个滑筒304,用于对拉绳402进行导向;如图1和图6所示,手部锻炼件4包括盒体401、拉绳402、拉手403、匚字形支板404、顶压板405和滑动杆406,盒体401上端面固定连接有一根拉绳402,且拉绳402另一端固定连接有拉手403,每根拉绳402分别与支撑杆件3上的其中两个滑筒304的内部滑动连接,且每根拉绳402外部均滑动连接有安装在支撑杆件3上的两个滑轮,从而使拉绳402能够得到有效导向作用;匚字形支板404固定连接在盒体401前端面,且匚字形支板404上滑动连接有四根滑动杆406,四根滑动杆406后端固定连接有顶压板405;手部锻炼件4还包括插杆407和配重块408,顶压板405后侧固定连接有十根插杆407,并且十根插杆407后端均贯穿盒体401前侧面,四根滑动杆406外部位于匚字形支板404内侧均套接有弹簧,且四根滑动杆406前端设置有提拉板;盒体401内部前后两侧面均呈均匀状开设有五个条形滑槽,且盒体401内部通过条形滑槽滑动连接有配重块408,且每个配重块408前端面均呈左右对称状开设有两个限位插孔;当配重块408安装至盒体401内部时,配重块408上开设的两个限位插孔将与其中两根插杆407后端插接,从而能够使配重块408在盒体401内部得到快速有效的固定作用;如图1和图8所示,脚部锻炼件5包括支撑板件501、传动辊502、驱动电机503和传动
带504,支撑板件501固定连接在床板102下端,且支撑板件501上端面通过转轴支座转动连接有四根传动辊502,四根传动辊502外部之间传动连接有传动带504,且传动带504外周面呈均匀状设置有防滑条纹,从而使传动带504外周面具有较好的摩擦力度,前侧一根传动辊502右端设置有蜗轮;驱动电机503安装在支撑板件501右端面,且驱动电机503上的转轴固定连接有蜗杆,并且蜗杆与蜗轮啮合,驱动电机503、电动缸105与控制器7电性连接,通过脚部锻炼件5的设置,从而使患者在进行脚部锻炼时无需下床即可完成锻炼;如图1和图9所示,支撑部6包括日字型管件601、伸缩滑杆602、固定板块603、螺纹筒604、支撑螺杆605和支撑板块606,日字型管件601的数量为两个,且两个日字型管件601固定连接在底座1上端面前后两侧,每根日字型管件601内部均滑动连接有两根伸缩滑杆602,左侧两根伸缩滑杆602和右侧两根伸缩滑杆602外端固定连接有两个固定板块603,且每个固定板块603上端面中部均设置有一个螺纹筒604;每个螺纹筒604内部均通过螺纹连接有一根支撑螺杆605,且每根支撑螺杆605下端均贯穿固定板块603,每根支撑螺杆605下端均转动连接有一个支撑板块606,且每个支撑板块606上端面均焊接有贯穿固定板块603的四根竖向导杆,每个支撑板块606底端面均设有两个支脚,用于将支撑板块606进行支撑;支撑部6还包括带动滑块607、齿条608和同步齿轮609,每个日字型管件601上端面均开设有两个条形通口,每根伸缩滑杆602上端面均焊接有一个带动滑块607,且每个带动滑块607上端均固定连接有一根齿条608,并且带动滑块607与日字型管件601上的条形通口滑动连接;同步齿轮609通过转轴转动连接在日字型管件601上端面,且同步齿轮609与两根齿条608啮合,通过两根齿条608与同步齿轮609的配合,使得两侧支撑板块606能够同时向外侧移动,提高支撑部6在进行支撑操作时的操作效率;如图1所示,底座1底部安装有万向轮,当底座1处于固定状态时,支撑板块606底端面的支脚下端将与地面接触,且底座1底部万向轮将与地面处于分离状态,从而使底座1此时能够得到有效稳固的支撑作用。
25.本实施例的具体使用方式与作用:本发明中,首先患者躺在床板102上端面,然后在锻炼时,将绑带104绑在患者腰部,然后通过手动转动调节螺杆a203,使调节螺杆a203在螺母内部螺纹作用下带动矩形滑动块201和座块2向头端滑动,然后座块2从矩形通口106内部移出,从而使座块2置于患者臀部下方,然后再通过控制器7将电动缸105启动,并控制电动缸105伸缩杆向外伸出,从而将床板102向前顶起,然后此时患者坐在座块2上,然后再进行手脚恢复锻炼即可;在手部锻炼时,通过手部握住拉手403,然后用力将拉手403向下牵引,从而使拉绳402带动盒体401及配重块408向上移动,从而使患者手部得到锻炼,当需要将手部牵引重量进行调节时,首先将四根滑动杆406前端的提拉板向前拉动,使四根滑动杆406后端带动顶压板405及插杆407向前移动,从而使插杆407从盒体401内部前侧拔出,然后将配重块408进行增减即可,增减后,再将四根滑动杆406前端的提拉板松开即可,松开后,顶压板405将在弹簧作用下带动插杆407向后移动,从而使插杆407后端穿过盒体401前侧壁,并插接在配重块408上的限位插孔内,从而使配重块408在盒体401内部得到有效固定作用;在脚部锻炼时,通过控制器7将驱动电机503启动,然后通过驱动电机503转轴、蜗杆和蜗轮带动前侧一根传动辊502顺时针缓慢转动,从而使传动带504进行顺时针传动,然后此时患者将脚部放置到传动带504顶部,在传动带504顺时针传动过程中,带动患者脚部
向后移动,然后患者再将向后移动的脚部抬起后向前移动,从而使得患者的脚部得到有效的锻炼。
26.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
27.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。