技术特征:
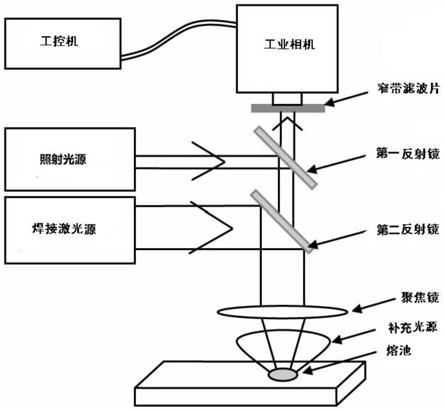
1.一种机器人激光双光束焊接控制系统,其特征在于,包括:用于拍摄熔池图像的工业相机;一组用于通过具有半透半反镜功能的第一反射镜与焊接激光源同轴输入的照射光源;所述照射光源还通过所述第一反射镜将照射光源透射至聚焦镜,为工业相机提供光源;焊接激光源;用于将焊接激光反射到聚焦镜的第二反射镜;位于所述聚焦镜下方预设距离的熔池;用于获取工业相机拍摄的熔池图像、并对所述图像进行分析和处理后,调整伺服电机的运动速度的工控机;焊接头;所述工控机与控制器进行通信,使得所述控制器按照工控机的指令对所述焊接激光源、所述电机进行控制,所述电机用于调节聚焦镜的位置;所述照射光源通过第一反射镜将光反射至第二反射镜,第二反射镜将焊接激光源发射的激光与照射光源发射的光同轴反射至聚焦镜,聚焦镜将激光聚焦到熔池,工业相机拍摄熔池照片并发送至工控机,工控机对熔池照片进行稳定性分析和处理后,对伺服电机进行控制,进而调节聚焦镜的位置,从而获得稳定的熔池照片。2.根据权利要求1所述的机器人激光双光束焊接控制系统,其特征在于,在所述焊接头的喷嘴周围设置补充光源,所述补充光源前方设置有保护镜片,所述补充光源周围设置有冷却水套。3.根据权利要求1所述的机器人激光双光束焊接控制系统,其特征在于,还包括置于所述工业相机前、用于过滤光线的窄带滤波器;所述照射光源采用波长为830nm的红外激光。4.根据权利要求1所述的机器人激光双光束焊接控制系统,其特征在于,所述工控机通过ethercat总线分别与焊接激光源、所述电机、plc控制器连接,所述照明光源、补充光源均通过i/o口与所述plc控制器连接。5.一种机器人激光双光束焊接控制方法,其特征在于,所述方法应用于上述权利要求1-4任一所述的机器人激光双光束焊接控制系统;所述方法包括步骤:获取工业相机通过第一反射镜和第二反射镜拍摄的聚焦镜下,由照明光源和焊接激光源在焊接件上形成的熔池图像。6.根据权利要求5所述的机器人激光双光束焊接控制方法,其特征在于,还包括,在所述获取工业相机通过第一反射镜和第二反射镜拍摄的第二聚焦镜下,由照明光源和焊接激光源在焊接件上形成的熔池图像之前,还包括:对所述照射光源和焊接激光源形成的光束进行过滤。7.根据权利要求5所述的机器人激光双光束焊接控制方法,其特征在于,还包括:当工控机对每20张照片做一次照片相邻像素点亮度梯度值判断,如果超出预设亮度梯度阈值,工控机通过电机调整第二聚焦镜的位置;当工控机通过熔池图像判断熔池处于不稳定状态时,向焊接激光源发出调整激光参数的信号;当图像不合预设要求时,发送指令至控制器,由所述控制器调整照明光源或补充光源的亮度。
技术总结
本发明实施例提供一种机器人激光双光束焊接控制系统,包括工业相机;照射光源;聚焦镜;焊接激光源;第二反射镜;熔池;工控机;焊接头;所述工控机与控制器进行通信,使得所述控制器按照工控机的指令对所述焊接激光源、所述电机进行控制,所述电机用于调节聚焦镜的位置;所述照射光源通过第一反射镜将光反射至第二反射镜,第二反射镜将焊接激光源发射的激光与照射光源发射的光同轴反射至聚焦镜,聚焦镜将激光聚焦到熔池,工业相机拍摄熔池照片并发送至工控机,工控机对熔池照片进行稳定性分析和处理后,对伺服电机进行控制,进而调节聚焦镜的位置,从而获得稳定的熔池照片。从而获得稳定的熔池照片。从而获得稳定的熔池照片。
技术研发人员:陈新松
受保护的技术使用者:中国航空制造技术研究院
技术研发日:2021.11.12
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。