技术特征:
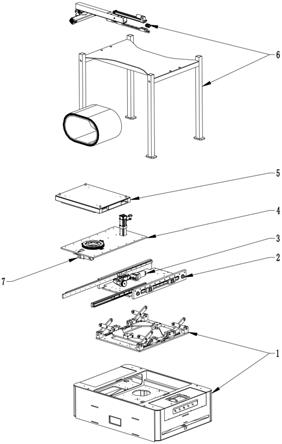
1.一种工件识别方法,其特征在于,包含:获取工件的多个视角的景深图像;其中,所述多个视角包括拍摄有所述工件的宽度信息的侧面视角;根据所述侧面视角的景深图像,获取所述工件的宽度;融合所述多个视角的景深图像,以获得工件的三维图像;根据所述三维图像,获取所述工件的长度和高度;根据所述工件的宽度,长度和高度,从数据库中获取工件的型号。2.根据权利要求1所述的工件识别方法,其特征在于,所述工件为圆角矩形或者跑道形的线圈;所述多个视角为四个视角。3.根据权利要求1所述的工件识别方法,其特征在于,根据所述侧面视角的景深图像,获取所述工件的宽度,具体包括:根据所述侧面视角的景深图像,获取所述工件的宽度边缘的轮廓;根据所述宽度边缘的轮廓,获取所述工件的宽度。4.根据权利要求1所述的工件识别方法,其特征在于,融合所述多个视角的景深图像,以获得工件的三维图像,之前还包括:基于平面度,选取工件顶面的局部区域;其中,所述平面度根据均方根计算得到;计算所述局部区域和工件下方的第一支撑平面的竖直距离;融合所述多个视角的景深图像,以获得工件的三维图像,具体包括:根据所述竖直距离,融合所述多个视角的景深图像,以获得工件的三维图像。5.根据权利要求4所述的工件识别方法,其特征在于,根据所述三维图像,获取所述工件的长度和高度,具体包括:根据所述三维模型,获取第一俯视图;其中,所述第一俯视图包含所述第一支撑平面;根据所述竖直距离,过滤所述第一俯视图中的所述第一支撑平面,获得所述工件的顶面的第二俯视图;二值化所述第二俯视图,并根据二值化后的所述第二俯视图,获取所述工件的长度;其中,所述长度为所述第二俯视图中,所述工件的长度方向的像素数量乘以单位像素对应的距离值得到。6.根据权利要求5所述的工件识别方法,其特征在于,根据所述三维图像,获取所述工件的长度和高度,还具体包括:根据所述三维图像,获取所述工件的顶面和所述工件下方的第二支撑平面;其中,所述第二支撑平面位于所述第一支撑平面的上方,且面积小于所述第一支撑平面;计算所述顶面和所述第二支撑平面的平均距离,获得所述工件的高度。7.一种工件识别设备,其特征在于,包含控制组件;所述控制组件包括处理器、存储器,以及存储在所述存储器内的计算机程序;所述计算机程序能够被所述处理器执行,以实现如权利要求1至6任意一项所说的工件识别方法。8.根据权利要求7所述的一种工件识别设备,其特征在于,所述工件识别设备还包含第一底座组件、配置于所述第一底座组件的第二底座组件和拍摄组件、配置于所述第二底座组件的第三底座组件和第一限位组件,以及配置于所述第三底座组件的第四底座组件和第
二限位组件;所述控制组件配置于所述第一底座组件;所述第一底座用以驱动所述第二底座升降;所述第二底座用以驱动所述第三底座靠近或远离所述第一底座;所述第一限位组件用以限制所述第三底座组件移动;所述第三底座用以驱动所述第四底座旋转;所述第二限位组件用以限制所述第四底座组件旋转;所述第四底座用以放置工件;所述拍摄组件,用以拍摄所述第一底座上方的景深图像;所述控制组件电连接于所述第一底座组件、所述第二底座组件、所述第三底座组件、所述第四底座组件、所述第一限位组件、所述第二限位组件和所述拍摄组件;所述获取工件的多个视角的景深图像,具体包括:判断所述第二底座组件是否处于最低点;当判断到所述第二底座组件处于最低点时,执行后续步骤;否则,控制所述第一底座组件驱动所述第二底座组件下降至最低点后执行后续步骤;控制所述第二底座组件驱动所述第三底座组件远离所述第一底座组件;控制所述第一底座组件驱动所述第二底座组件升高,以使所述第四底座组件支撑于工件;控制所述第二底座组件驱动所述第三底座组件靠近所述第一底座组件;控制所述第一底座组件驱动所述第二底座组件降低;,以使所述第四底座组件上的工件位于拍摄工位;控制所述第一限位组件限位所述第三底座组件,以防止所述第三底座组件移动;控制所述第二限位组件限位所述第四底座组件,以防止所述第四底座组件转动;控制所述拍摄组件拍摄第一视角的景深图像;重复执行当前步骤以拍摄预定数量个视角的景深图像:控制所述第一限位组件和所述第二限位组件解除限位,控制所述第三底座组件驱动所述第四底座组件旋转,控制所述第一限位组件和所述第二限位组件进行限位,然后控制所述拍摄组件拍摄下一个视角的景深图像;在拍摄到预定数量个视角的景深图像后:控制所述第一底座组件驱动所述第二底座组件升高;控制所述第二限位组件和所述第一限位组件解除限位;控制所述第二底座组件驱动所述第三底座组件远离所述第一底座组件;控制所述第一底座组件驱动所述第二底座组件下降,以使所述工件脱离所述第四底座组件;控制所述第二底座组件驱动所述第三底座组件靠近所述第一底座组件,以使所述设备复位。9.一种工件识别装置,其特征在于,包含:图像获取模块,用于获取工件的多个视角的景深图像;其中,所述多个视角包括拍摄有所述工件的宽度信息的侧面视角;宽度获取模块,用于根据所述侧面视角的景深图像,获取所述工件的宽度;图像融合模块,用于融合所述多个视角的景深图像,以获得工件的三维图像;长高获取模块,用于根据所述三维图像,获取所述工件的长度和高度;型号获取模块,用于根据所述工件的宽度,长度和高度,从数据库中获取工件的型号。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如权利要求1至6任意一项所说的工件识别方法。
技术总结
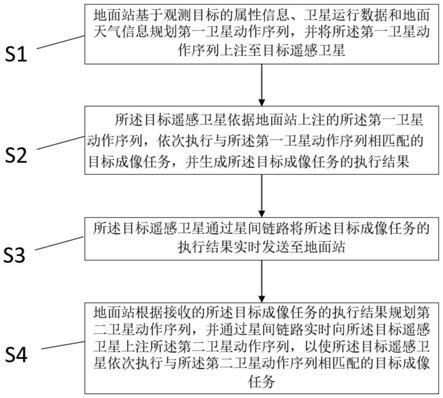
本发明实施例提供一种工件识别设备、方法、装置和存储介质,涉及自动化辅助设备技术领域。其中,这种工件识别方法包含如下步骤:S1、获取工件的多个视角的景深图像。其中,多个视角包括拍摄有工件的宽度信息的侧面视角。S2、根据侧面视角的景深图像,获取工件的宽度。S5、融合多个视角的景深图像,以获得工件的三维图像。S6、根据三维图像,获取工件的长度和高度。S7、根据工件的宽度,长度和高度,从数据库中获取工件的型号。通过工件的多个角度的景深图像融合得到工件的三维模型,然后通过三维模型的参数从数据库中获取工件的型号,从而识别工件。无需在工件上设置标识,即可对工件进行识别,具有很好的实际意义。具有很好的实际意义。具有很好的实际意义。
技术研发人员:林陈鸿 叶煌城 潘定国 袁子良 秘家志
受保护的技术使用者:厦门航天思尔特机器人系统股份公司
技术研发日:2021.12.01
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。