1.本发明涉及输送系统。
背景技术:
2.一直以来,在各种输送系统中,都是通过对拍摄输送物生成的图像进行处理,从而进行输送物的计数、良否判断、姿势辨别、输送状态(速度、密度、间隔等)的检测等。作为上述输送系统的例子,可以举出以下的专利文献1和专利文献2中记载的装置。另外,以下的专利文献3和专利文献4中公开了如下方法:在上述输送系统中,为了变更输送路上的输送物的姿势而向输送物吹送气流,从而变更姿势,由此使输送物的姿势整齐一致地进行供给。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利特开2017-121995号公报
6.专利文献2:日本专利特开2019-169010号公报
7.专利文献3:日本专利特开平11-240615号公报
8.专利文献4:日本专利特开2000-264430号公报
技术实现要素:
9.然而,在上述输送系统中,当变更输送物的姿势时气流的吹送压力或吹送时机不当时,有时变更后的姿势会不合适、或者变更后的姿势变得无规律。因此,需要按输送物的种类调整气流的吹送压力或吹送时机,因而存在如下问题:每次变更输送物的姿势时都要花费时间进行调整作业,并且需要熟练人员来适当地进行调整。
10.因此,本发明是为了解决上述问题而完成的,其课题在于,在输送系统中实现输送物姿势变更单元的动作形态的调整作业的快速化和简单化。
11.为了解决上述问题,本发明的输送系统具备:输送装置,其沿输送路输送输送物,并在所述输送路的中途具有变更所述输送物的姿势的姿势变更部位;图像获取单元,其获取所述输送物的图像;输送物辨别单元,其在设定于所述姿势变更部位的上游侧的判断区域中对所述输送物的图像部分进行图像处理,从而得到与所述输送物的姿势相关的输送物辨别信息;输送物姿势变更单元,其在所述输送物辨别信息为需要变更所述输送物的姿势的信息时,在所述姿势变更部位实施所述输送物的姿势变更;以及输送物确认单元,其对被所述输送物姿势变更单元变更了姿势之后的所述输送物的图像部分进行图像处理,从而得到与所述输送物的姿势相关的输送物确认信息。
12.根据本发明,由于通过得到与输送物的姿势相关的输送物确认信息,能够确认通过输送物姿势变更单元的动作而产生的输送物的姿势变更后的状态,因而可以在确认该信息的同时进行输送物姿势变更单元的动作形态的调整,使输送物姿势变更单元的动作形态的调整作业变得容易,并使姿势变更部位处的输送物的姿势变更形态高精度化。
13.在本发明中,优选还具备输送物姿势变更判断单元,所述输送物姿势变更判断单
元求出表示所述输送物辨别信息与所述输送物确认信息的关系的输送物姿势变更信息。根据该发明,通过求出表示输送物的姿势变更前的辨别信息与输送物的姿势变更后的确认信息的关系的输送物姿势变更信息,能够更加容易地确认输送物姿势变更单元的动作形态与通过输送物姿势变更单元的动作而产生的输送物的姿势变更状态的关系。
14.在本发明中,优选所述输送物确认单元通过对确认区域的图像部分进行图像处理而求出所述输送物确认信息,其中,所述确认区域设定于所述输送物在所述姿势变更部位处被所述输送物姿势变更单元变更了姿势之后配置的位置或范围内。在此,所述确认区域最好在相对于包含所述判断区域的图像部分的所述图像经过了既定时间的时间点及其之后拍摄的别的所述图像中,设定于与所述姿势变更部位具有既定的位置关系的图像部分中。另外,最好还具备针对每个所述图像或每个所述输送物预测所述确认区域的位置或范围的确认区域预测单元。此外,所述确认区域也可以设置于预先设定的固定的位置或范围内。
15.在本发明中,优选还具备控制所述输送物姿势变更单元的动作形态的姿势变更控制部;所述姿势变更控制部根据所述输送物确认信息或者通过所述输送物姿势变更判断单元输出的所述输送物姿势变更信息自动地设定所述输送物姿势变更单元的动作形态。根据该发明,由于能够根据输送物确认信息或者输送物姿势变更信息自动地调整输送物姿势变更单元的动作形态,因而既能减少调整作业的麻烦,又能提高姿势变更的准确性。
16.在本发明中,优选所述输送物姿势变更单元通过向所述输送物吹送气流来变更所述输送物的姿势。在此,所述动作形态最好是所述气流的吹送时机和吹送压力的至少一者。此外,上述输送物姿势变更单元并不限于上述使用气流的装置,也可以是机械臂等的机械装置,或者也可以是利用输送路的形状或结构的装置,例如通过在输送路的一部分形成阶梯等而使输送物转动的装置。
17.在本发明中,优选所述判断区域和所述确认区域均为所述图像的内部包含的区域。根据该发明,由于能够在单个图像内设定输送物辨别处理和输送物确认处理中使用的两个区域,因而能够使两个区域之间的位置关系的设定变得容易,并且有望简化照相机等的拍摄系统。
18.(发明效果)
19.根据本发明,能够在输送系统中实现针对输送物姿势变更单元的动作形态的调整作业的快速化和简单化。
附图说明
20.图1是表示本发明涉及的输送系统的实施方式的输送物姿势变更控制处理部的大致流程的概略流程图。
21.图2中的(a)是表示该实施方式的输送物确认处理过程101的大致流程的概略流程图,(b)是表示输送物姿势变更设定处理过程102的大致流程的概略流程图。
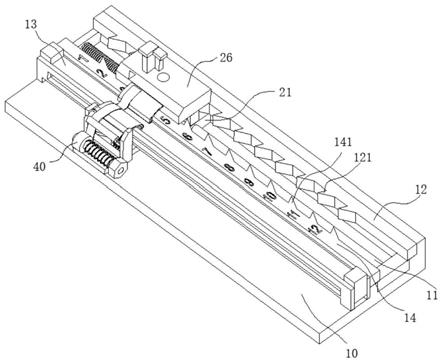
22.图3是表示该实施方式的输送系统的整体构成的概略构成图。
23.图4中的(a)~(d)是用于说明该实施方式的输送物姿势变更控制中使用的输送物辨别处理的说明图。
24.图5中的(e)~(h)是用于说明该实施方式的输送物姿势变更控制中使用的输送物
确认处理的说明图。
25.图6中的(a)和(b)是表示该实施方式的输送物辨别信息与输送物确认信息的对应关系的一例的说明图,(c)和(d)是表示其他例子的说明图。
26.图7中的(a)是表示该实施方式中的输送物姿势变更设定单元的构成例的构成框图,(b)是表示输送物辨别信息bi与输送物确认信息ej的组合和与之对应的输送物姿势变更信息gij的对应关系、以及这些与输送物姿势变更单元的动作形态的调整和设定内容的关系的对应关系图表,(c)是表示用于将输送物的多个输送姿势cn1~cn4统一为一个cn1的多个姿势变更部位的构成例的图。
27.图8是表示该实施方式中的动作程序10p的一例的处理过程的概略流程图。
28.(符号说明)
29.10
…
输送系统、10p
…
动作程序、11
…
送料器、110
…
输送体、111
…
输送路、12
…
直线送料器、120
…
输送体、121
…
输送路、op
…
喷气口、ca
…
输送物、cn1~cn4
…
输送姿势、cm1、cm2
…
照相机、cl11、cl12
…
控制器、dtu
…
检查处理单元、dp1、dp2
…
显示装置、gp1、gp2
…
图像处理装置、gm1、gm2
…
图像处理存储器、gpx
…
拍摄图像、gpy
…
图像区、mpu
…
运算处理装置、mm
…
主存储装置、sp1、sp2
…
操作输入装置、ram
…
运算处理用存储器、θ
…
基准倾斜角、100
…
输送物姿势变更控制处理部、101
…
输送物确认处理过程、102
…
输送物姿势变更设定处理过程、a
…
图像获取单元、ai
…
图像、b
…
输送物辨别单元、bi
…
输送物辨别信息、c
…
输送物姿势变更单元、ci
…
输送物辨别结果、d
…
确认区域预测单元、da
…
判断区域、db
…
确认区域、e
…
输送物确认单元、ej
…
输送物确认信息、g
…
输送物姿势变更判断单元、gij
…
输送物姿势变更信息、h
…
输送物姿势变更设定单元
具体实施方式
30.接着,参照附图对本发明涉及的输送系统的实施方式详细进行说明。首先,参照图1至图3对本发明涉及的输送系统的实施方式的概要进行说明。图1是表示本实施方式涉及的输送系统10的计算机所执行的动作程序10p的一部分、即输送物姿势变更控制处理部100的处理流程的概略流程图。图2中的(a)是表示作为输送物姿势变更控制处理部100的一部分的输送物确认处理过程101的处理流程的概略流程图,(b)是表示输送物姿势变更设定处理过程102的处理流程的概略流程图。图3是模式化表示输送系统10的实施方式的整体构成的概略构成图。
31.首先,参照图3对输送系统10的整体构成进行说明。如图3所示,该输送系统10是沿规定的输送路输送输送物ca的输送系统。该输送系统10构成具备送料器11和直线送料器12的振动式的输送装置,其中,送料器11具备具有螺旋状的输送路111且呈碗型的输送体110,直线送料器12具备具有直线状的输送路121的输送体120,该直线状的输送路121具备被构成为从该送料器11的上述输送路111的出口接收输送物的入口。另外,该输送装置具有输送管理功能,该输送管理功能根据拍摄图像gpx对直线送料器12的输送体120的输送路121上的输送物即输送物ca进行检查、判断。此外,在本发明中,不限于振动式的输送装置的构成可以使用于沿输送路输送输送物ca的各种输送装置中。另外,即使是振动式的输送装置,也不限定于上述送料器11与直线送料器12的组合,也可以使用于循环式送料器等其他形式的输送装置。进而,即使在上述组合中,也不限于检查直线送料器12的输送路121上的输送物
即输送物ca,也可以检查送料器11的输送路111上的输送物ca。
32.送料器11通过控制器cl11进行驱动、控制。另外,直线送料器12通过控制器cl12进行驱动、控制。该控制器cl11、cl12对送料器11和直线送料器12的激振机构(包括电磁驱动体或压电驱动体等)进行交流驱动,使输送体110、120振动以使输送路111、121上的输送物(输送物ca)变为朝向规定的输送方向f移动的状态。另外,控制器cl11、cl12经由输入输出电路(i/o)与作为输送管理系统主体的具有图像处理功能的检查处理单元dtu连接。
33.另外,当经由鼠标等后述的操作输入装置sp1、sp2等对执行上述输送物姿势变更控制处理部100的运算处理装置mpu进行规定的操作输入(调试操作)时,控制器cl11、cl12根据上述动作程序10p使输送系统10的输送装置的驱动停止。此时,按照上述动作程序10p,也使例如检查处理单元dtu中的图像测量处理停止。关于该调试操作及与该操作对应的各部位的动作,之后详细进行叙述。
34.检查处理单元dtu以个人计算机等的运算处理装置mpu(微处理器)为核心构成。在图示例中,上述运算处理装置mpu由中央处理器cpu1、cpu2、高速缓冲存储器ccm、存储器控制器mcl、芯片组chs等构成。另外,该检查处理单元dtu中设置有图像处理电路gp1、gp2,该图像处理电路gp1、gp2分别与作为拍摄装置的照相机cm1、cm2连接并用于执行图像处理。该图像处理电路gp1、gp2分别与图像处理存储器gm1、gm2连接。图像处理电路gp1、gp2的输出也与上述运算处理装置mpu连接,对于从照相机cm1、cm2获得的拍摄图像gpx的图像数据进行处理,将适当的处理图像(例如后述的图像区gpy内的图像数据)传送至运算处理装置mpu。主存储装置mm中预先存储有输送管理系统的动作程序10p。当检查处理单元dtu启动时,通过运算处理装置mpu读出并执行上述动作程序10p。另外,在该主存储装置mm中,保存有作为通过运算处理装置mpu执行后述图像测量处理的对象的拍摄图像gpx或图像区gpy的图像数据。
35.另外,检查处理单元dtu经由输入输出电路(i/o)与液晶监视器等的显示装置dp1、dp2或操作输入装置sp1、sp2连接。显示装置dp1、dp2以规定的显示方式显示通过上述运算处理装置mpu处理后的拍摄图像gpx或图像区gpy的图像数据、图像测量处理的结果,即输送物辨别处理或输送举动检测处理的结果等。此外,该显示功能并不限于在实际输送输送物ca时发挥作用,在如后所述读出过去的数据并进行再生时也发挥作用。另外,通过一边观察显示装置dp1、dp2的画面一边对操作输入装置sp1、sp2进行操作,可以将各种操作指令、设定值等的处理条件输入上述运算处理装置mpu中。
36.在本实施方式中,照相机cm1、cm2以既定的拍摄间隔连续进行拍摄,并且对测量区域内的图像数据实施图像测量处理,其中,该测量区域具有预先根据输送物的输送速度vs与拍摄间隔ts的关系设定为通过输送路的所有输送物ca的至少辨别对象部分始终包含于任一图像中的输送方向f上的范围。由此,所有输送物ca必定能够在任一测量区域的拍摄图像中检测到,因而不需要如现有技术那样生成用于检测每个输送物的位置的触发信号。另外,可以通过对该图像中包含的输送物ca的图像数据进行处理,从而可靠地提取出输送物辨别处理、输送物检测处理、输送举动检测处理等所需的信息。此外,在本发明的输送系统中,也可以不采用上述那样的无触发拍摄法,而在与通常利用传感器等检测输送物的检测时机对应的拍摄时机获取图像。此外,在本实施方式中,上述辨别对象部分设为输送物ca的整体,但也可以将输送物ca的一部分、例如显现出输送物ca的侧面上标识的辨别标记等的
部分设为上述辨别对象部分。
37.在输送系统10中,通过由上述运算处理装置mpu执行的后述动作程序10p(参照图8)中包含的图1所示的输送物姿势变更控制处理部100的执行,执行输送途中的输送物辨别处理,并根据该处理的辨别结果控制上述输送装置。在该输送物姿势变更控制处理部100中,通常在上述图像的测量区域内对输送物ca实施图像处理,由此对输送物ca进行辨别。当输送物ca适当时,可以原封不动地在输送路上进行输送,因而无需特别进行任何处理,而当判明输送物ca不当时,需要进行各种处理,例如从输送路上排除、或者在输送路上变更姿势、或者返回上游侧,等等。在本实施方式中,上述输送物姿势变更控制处理部100中包括执行辨别输送物ca的姿势的处理(输送物辨别处理)的部分,并且,根据该部分的姿势的辨别结果ci实施输送物ca的姿势变更处理。
38.在此,在本说明书中,作为变更输送物ca的姿势的各种方式的一种,包括输送物ca的翻转。另外,“姿势变更”不仅包含使输送物ca上下颠倒的意义上的翻转,而且广泛包含最终使输送物ca的姿势发生变化的各种方式,例如使输送物ca绕任意轴转动任意角度(旋转90度、旋转180度、旋转270度等)等等。此外,在本实施方式的输送物姿势变更控制处理部100中,除了辨别输送物ca的姿势的处理之外,也可以执行辨别输送物ca良否的处理等其他的辨别处理,另外,还可以执行变更输送物ca的姿势的输送处理以外的、诸如排除输送物ca的处理等其他的输送处理。另外,在以下的说明中,除了图8所示的输送物筛选处理之外,省略上述其他的辨别处理或其他的输送处理的说明。
39.如图1所示,在输送物姿势变更控制处理部100中,首先读出初始值等的各种设定值,然后利用由上述检查处理单元dtu构成的图像获取单元a依次获取多个图像ai。这些图像ai基本上可以是由上述检查处理单元dtu生成的上述拍摄图像gpx或图像区gpy的图像数据本身,或者,也可以由这些图像数据的一部分构成。当获得这些图像ai时,执行设定于该图像ai内的判断区域da的图像处理和确认区域db的图像处理。
40.图4中的(a)-(d)以及图5中的(e)-(h)是表示输送系统10的输送路121上的输送物的输送形态的例子的说明图。输送物ca在输送路121上沿输送方向f前进。此时,在通过图像获取单元a获得的图像ai中,设置有作为上述测量区域而形成的判断区域da。该判断区域da被设置为在输送路121上限定于具有喷气口op的姿势变更部位的上游侧的区域。
41.如图1所示,上述输送物姿势变更控制处理部100具备:图像获取单元a,其依次获取包含可能存在输送物ca的测量区域的多个图像ai;输送物辨别单元b,其执行这些图像ai内的判断区域da的图像处理;输送物姿势变更单元c,其根据输送物ca的辨别结果ci在上述姿势变更部位进行动作,从而执行输送物ca的输送姿势的变更,其中,该输送物辨别信息bi根据由该输送物辨别单元b求出的输送物辨别信息bi而得到;以及输送物确认单元e,其确认通过上述输送物姿势变更单元c变更了姿势的输送物ca的姿势,并求出输送物确认信息ej。在此,i是自然数,表示1~n(n为2以上的自然数)的多个数。另外,优选具有根据针对某个输送物ca的输送物辨别结果ci和输送物确认结果ej求出输送物姿势变更信息gij的输送物姿势变更判断单元g。此外,输送物确认单元e并无特别限定,如图4和图5所示,通过执行确认区域db的图像处理而确认姿势变更后的输送物ca的姿势。在本实施方式的情况下,确认区域db被设定于与输送路121不同的输送路122上且相比上述判断区域da更靠下游侧的位置处。
42.输送物辨别信息bi至少包括与输送物ca的姿势相关的信息。另外,优选包括表示输送物ca的配置的输送物检测范围(位置信息)。进而,还可以包括与输送物ca的种类、外观、有无缺陷或缺陷种类、输送物的良否相关的信息等。在此,在例如输送物ca呈立方体状的情况下,最好构成为在图像ai中拍摄到输送物ca的至少两个面,以便良好地获取与输送物ca的姿势相关的信息作为输送物辨别信息bi。因为图像数据中包含输送物ca的六个面中尽可能多的面的信息的话更适于辨别输送物ca的姿势。因此,优选如图4和图5所示拍摄到立方体状的至少两个面。此外,在本实施方式中,在说明中使用的姿势变更部位处,仅将输送物ca的前后两端面(图示中设有电极的部分)以外的四个侧面围绕沿着输送方向f的轴的四种输送姿势(后述的cn1~cn4)作为说明的对象,但也可以将加上前后方向颠倒后的形态的总计八种输送姿势作为对象,进而还可以将加上使前后两端面朝向与输送方向正交的侧方的又八种输送姿势的总计16种输送姿势作为对象。
43.另外,上述输送物辨别结果ci是通过本次的图像ai内的判断区域da的图像处理得到的与输送物ca的姿势相关的辨别结果,根据预先设定的姿势基准而表示例如该姿势是良好(ok)还是不良(ng)。当然,也可以根据作为上述输送物辨别信息bi的辨别输送物ca的多个姿势的信息而得到三个以上的辨别结果作为输送物辨别结果ci。例如,也可以是能够分别辨别输送物ca的多种输送姿势的结果。
44.作为输送物确认单元e的一例,如图2中的(a)所示,也可以包括预测确认区域db的确认区域预测单元d。一般而言,确认区域db也可以如图4和图5所示设定于图像ai(aj)内的固定位置处,该情况下,不需要确认区域预测单元d。在使用确认区域预测单元d的情况下,根据输送物ca的输送状况来预测用于导出输送物确认信息ej的图像aj的确认区域dbj的位置和范围。该情况下,作为输送状况,可以举出输送物ca的输送速度、过去的输送物的姿势变更后的输送路122上的位置、从姿势变更部位处的喷气口op供给的气流的吹送时机和吹送压力等的信息。通过该确认区域预测单元d导出确认区域dbj在图像aj中的位置和范围(拍摄范围)、和设定有确认区域dbj的图像aj(或者,相当于图像aj的拍摄时机(拍摄时间)),由此对设定的确认区域dbj执行输送物确认单元e的图像处理。确认区域db的预测针对每个图像aj、或者姿势变更后的每个输送物ca执行。
45.此外,在图4和图5所示的例子中,将确认区域db在固定位置处设为固定的范围,但是,即使在该情况下,也可以如图1所示,针对获得的每个图像ai辨别是否需要在确认区域db中执行输送物确认处理,并仅对需要的图像aj在确认区域db中执行图像处理。是否需要该输送物确认处理,取决于此前的图像ai中输送物辨别结果ci是否为需要变更姿势,由此通过输送物姿势变更单元c对输送物ca实施了姿势变更。因为若无上述姿势变更,则无需进行输送物确认处理。另外,在通过此前的图像ai中的输送物辨别处理进行了上述姿势变更的情况下,只要在该图像aj(j>i,其中,存在为单个图像的情况或为多个图像的情况)中在确认区域db进行图像处理,并确认是否检测到输送物ca即可,若检测到输送物ca,并求出了与该输送物ca的姿势相关的输送物确认信息ej,则重置上述姿势变更的事实,视为未进行上述姿势变更。
46.此外,由于确认区域预测单元d预测确认区域dbj的位置及范围和拍摄时间,因此,图像aj是否为需要确认的图像只要根据预测内容进行判断即可。然而,考虑到预测精度,关于一个或多个图像aj是否为需要确认的图像的判断,也可以与预测内容分开查看输送物确
认单元e的图像处理的结果,并根据在确认区域dbj内是否检测到输送物ca进行判断。即,该情况下,虽然使用确认区域dbj的位置和范围,但实际上不使用与预测拍摄时间对应的图像aj的预测结果。无论在哪种情况下,只要在任一图像aj中检测到输送物ca,则与该输送物ca的姿势相关的信息即为上述输送物确认信息ej。此外,如之后所述,也存在因为输送物ca的返回动作等而使得确认区域db(dbj)中确认不到输送物ca的情况(不存在输送物ca的情况),因此,当在可能存在与某个姿势变更对应的输送物确认信息的图像aj(多个图像aj时为所有图像)中未检测到输送物ca时,输送物确认信息包含“未检测到”这一结果,此时也进行上述重置。
47.也可以与上述判断区域da同样地将确认区域db、dbj设定为上述测量区域。这是因为,大多数情况下,输送路122上输送的姿势变更后的输送物ca基本上具有与在输送路121上输送时相同的输送速度。该情况下,确认区域db只要设定于相比可能配置有姿势变更后的输送物ca的位置更靠下游侧的位置处即可。此外,在图示例中,输送路122构成为与输送路121并行地向下游侧延伸,最后与输送路121汇合。在此,通常构成为:输送路122上的输送物ca在汇合至输送路121上时,在输送路121上变为标准的输送姿势。在此,确认区域db、dbj的设定部位并不限于与输送路121不同的输送路122上,也可以构成为姿势变更后的输送物ca配置于输送路121上。
48.另外,确认区域db、dbj被设定为限定的区域。但是,优选将该区域以具有比输送物ca的至少辨别对象部分(或者整体)更大的范围的方式设定为具有富余的范围。由此,能够更加可靠地执行输送物确认处理。虽然从能够可靠地检测姿势变更后的输送物ca这一点来看确认区域db、dbj的范围较大为好,但范围越大则图像处理的负荷也越大。因此,优选根据该输送装置中的输送物ca的移动特性确定确认区域db、dbj的扩大率。例如,在输送物ca的姿势变更后的位置的偏差较大的情况下,需要增大上述扩大率,而在偏差较小的情况下,可以减小上述扩大率。在能够得到多个过去实际的输送物ca的姿势变更后的移动状态的情况下,最好根据这些移动状态的集合的偏差(例如标准偏差)(以与该偏差具有正相关关系的方式)增大或减小上述扩大率。通过这样,既能减轻图像处理的负担,又能通过确认区域db、dbj中的图像处理可靠地执行输送物ca的姿势变更后的确认处理。
49.接着,参照图1和图2以及图4和图5对本实施方式的输送方式进行说明。如图4中的(a)所示,输送物ca在输送路121上沿输送方向f输送。在此,在输送路121的图示上方(实际为侧方),并行形成有另一条辅助的输送路122。在输送路121的中途,设置有喷气口op在输送面上开口的姿势变更部位。另外,在与该姿势变更部位的上游侧邻接的范围内设置有判断区域da。该判断区域da包含于上述图像ai中。如图1所示,依次获得多个图像ai。在图示例中,第一个图像a1在判断区域da中未检测到输送物ca,在下一个图像a2中也是同样的。直到再下一个图像a3才在判断区域da中检测到输送物ca。此外,判断区域da如上所述被设定为沿输送方向f的长度范围lda与输送物ca的输送速度vs和拍摄间隔ts的关系满足lda>vs
·
ts,以使从输送路121上通过的所有输送物ca(的至少辨别对象部分)必定能够在任一图像ai中检测到。但是,实际上优选以lda≥vs
·
ts δl的方式设置余量δl,可能的话,最好为lda≥2vs
·
ts。另外,上述范围lda的上限优选为2vs
·
ts以上且3vs
·
ts以下。判断区域da在与输送方向f正交的方向上的宽度最好大于输送物ca的至少辨别对象部分的宽度,但在本实施方式中,由于是通过振动来输送输送物ca,因而输送物ca在宽度方向上也存在一定
程度的摆动,因此,最好在该宽度方向上也设置输送物ca的辨别对象部分(或者整体)的宽度的10%~80%左右的余量δw。
50.输送物ca在图示例中构成为立方体状,并以使长度方向朝向输送方向f进行输送的形态进行图示。该情况下,可以通过形成于输送物ca的除前后端面之外的四个侧面的一部分上的标识m检测输送物ca的姿势。在图示例中,标识m形成于一个侧面的整个宽度方向和长度方向的一半范围内(图中的阴影部分)。另外,标识m的端部出现在与上述一个侧面邻接的两个侧面的边界部分(棱线附近),由此,只要能够详细确认四个侧面中的一个面,便可以确定输送物ca的围绕沿着输送方向f的轴线的输送姿势。但是,在图示例中,以能够在图像ai中同时看到输送物ca的至少邻接的两个侧面的方式设置照相机cm1、cm2的拍摄方向。即,通过照相机的拍摄方向与输送路121的输送面121a、121b(彼此大致正交的面)之间的角度设定,以能够看到输送物ca的一条棱线的形式使该棱线两侧的相邻两个侧面同时包含在图像中。此外,在图示例中,示出了以标识m配置于输送物ca的右上部作为标准的输送姿势的情况。另外,另一条输送路122具备输送面122a、122b。该输送面122a、122b是彼此大致正交的面。
51.在本实施方式中,如图4中的(c)所示,当在图像a3的判断区域da中检测到输送物ca时,通过利用判断区域da的图像处理执行的输送物辨别处理导出输送物辨别信息b3。根据该输送物辨别信息b3判断与标识m的位置对应的输送物ca的输送姿势,作为输送物辨别结果c3而得到并非标准的输送姿势的判断“ng”。因此,当如图5中的(e)所示该输送物ca到达姿势变更部位时,如图5中的(f)所示从喷气口op吹送气流,该输送物ca一边转动一边从输送路121上移动到输送路122上。此外,由于喷气口op以能够向输送路121上的输送物ca的偏上部的范围施加压力的方式开口,因此,不仅能够将输送物ca单纯从输送路121上排除,而且能够使输送物ca围绕沿着输送方向f的轴转动。由此,输送物ca如图5中的(f)和(g)所示姿势逐渐改变,最后,如图5中的(h)所示,当配置于输送路122上时,变更为与输送路121上的输送姿势不同的规定的输送姿势。在图示例的情况下,配置于输送路122上时的输送物ca的输送姿势变为上述标准的输送姿势。在图示例的情况下,该姿势变更部位处的输送物ca的姿势变更是通过使其围绕沿着输送方向f的轴(围绕长度方向的轴)旋转180度而完成的。
52.在本实施方式中,在图像ai内设置有确认输送路122上的输送物ca的确认区域db。在图示例的情况下,确认区域db是预先具有图像ai中的既定的位置和范围的固定区域。但是,如上所述,也可以针对实施输送物确认处理的每个图像aj、或者针对每个输送物ca预测确认区域dbj而进行设定。在该确认区域db中也执行图像处理,并输出输送物确认信息ej。此外,图1中示出了如下情况,即:根据基于在图像ai的判断区域da中执行输送物辨别处理而得到的输送物辨别信息bi的输送物辨别结果ci对输送物ca实施姿势变更处理,并在图像aj的确认区域db(dbj)中对该姿势变更后的输送物ca执行输送物确认处理而得到输送物确认信息ej。如上所述,在图4和图5中,示出了输送物确认信息ej是姿势变更后的输送物ca的输送姿势为标准的输送姿势的情况。相对于此,图6中的(b)和(d)中示出了如下情况,即:根据如图6中的(a)和(c)所示通过图像ai的判断区域da中的图像处理而导出的输送物辨别信息bi变更了输送物ca的姿势,结果姿势变更后的输送物ca的输送姿势为标准输送姿势以外的姿势。在此,图6中的(b)示出了如下情况,即:输送物ca从图6中的(a)所示的输送姿势变
为围绕沿着输送方向f的轴(围绕长度方向的轴)旋转了270度的输送姿势,由于旋转过度而越过标准输送姿势变为非标准的输送姿势。另外,图6中的(d)示出了如下情况,即:输送物ca从图6中的(c)所示的输送姿势变为围绕沿着输送方向f的轴(围绕长度方向的轴)旋转了90度的输送姿势,由于旋转不足而未达到标准的输送姿势,变为非标准的输送姿势。
53.当如上所述得到输送物确认信息ej时,接着通过图1所示的输送物姿势变更判断单元g,如图2中的(b)所示利用输送物辨别信息bi和输送物确认信息ej求出输送物姿势变更信息gij。该输送物姿势变更信息gij是表示输送物ca的判断区域da中的姿势变更前的输送姿势(参照图4中的(c)、图6中的(a)、图6中的(c))与输送物ca的姿势变更后的确认区域db中的输送姿势(参照图5中的(h)、图6中的(b)、图6中的(d))的关系的信息。该输送物姿势变更信息gij可以仅仅单纯包含表示输送物ca的判断区域da中的姿势变更前的输送姿势的信息部分、和表示输送物ca的姿势变更后的确认区域db中的输送姿势的信息部分这两部分,或者也可以仅包含表示两个信息部分的关系的信息。另外,也可以是表示与姿势变更前后的输送姿势对应的类别的记号或文字,例如图4和图5的例子中表示姿势变更前的输送姿势并非标准的输送姿势(ng)、表示姿势变更后的输送姿势为标准的输送姿势(ok)这样的信息。
54.当如上述那样导出输送物姿势变更信息gij时,通过图1所示的输送物姿势变更设定单元h如图2中的(b)所示根据该信息执行输送物姿势变更设定处理。该输送物姿势变更设定处理根据输送物确认信息ej或者输送物姿势变更信息gij调整和设定从上述姿势变更部位的喷气口op向输送物ca吹送的气流的吹送时机或吹送压力。在图示例中,根据输送物姿势变更信息gij设定姿势变更控制部,但也可以根据情况而仅根据输送物确认信息ej进行设定。例如,如图4和图5所示,在通过输送物确认处理得到的输送物确认信息ej是与标准的输送姿势对应的信息时,视为该吹送时机和吹送压力合适,维持原来的设定值。另一方面,如图6中的(a)和(b)以及(c)和(d)所示,当输送物ca与标准的输送姿势不同,从而输送物确认信息ej并非与标准的输送姿势对应的信息时,变更上述气流的吹送时机或吹送压力等姿势变更部位的动作形态,从而调整对于输送物ca的姿势变更的作用。此时,优选输送物确认信息ej包含表示为具体的输送姿势的种类的哪一种的详细信息,由此,最好针对具体的输送姿势的种类变更上述动作形态的调整方法。例如,在如图6中的(b)所示输送物ca的姿势变更时的转动角度过大时,降低上述吹送压力,在如图6中的(d)所示输送物ca的姿势变更时的转动角度过小时,增大上述吹送压力。另外,虽未特别图示,但在输送物确认信息ej为图5中的(f)所示那样吹送时机过晚时出现的输送姿势b6
′
时,提前吹送时机。反之,在图5中的(g)所示那样吹送时机过早时出现的输送姿势b7
′
时,延迟吹送时机。
55.图7中的(a)是表示姿势变更控制系统的构成的概略构成图,该姿势变更控制系统实现用于在本实施方式的上述姿势变更部位处变更输送物ca的姿势的动作形态。例如,由上述控制器cl12的一部分构成的姿势变更控制部103,控制调节器124的压力设定部124a,将气体的供给压力设定为可调节,并且控制连接于调节器124下游侧的电磁阀等构成的供给阀125的开闭驱动部125a,设定供给阀125的开闭动作时机,其中,调节器124用于调节从压缩机等的压缩气体源123供给的压缩气体(空气等)的压力。在此,上述输送物姿势变更控制部103可以通过上述输送物姿势变更设定单元h调整和变更上述供给压力和开闭动作时机。
56.图7中的(b)是表示本实施方式的由输送物辨别信息bi和输送物确认信息ej的组合表示的输送物姿势变更信息gij、与姿势变更部位的输送物姿势变更单元c的动作形态的调整内容之间的关系的对应关系图。根据该图,在输送物确认信息ej为“ok”时,不进行上述动作形态的调整,但在输送物确认信息ej为“ng”,而且输送物ca的姿势变更时的转动角度过大时(图6中的(b)所示的情况),即为“ng ”时,使气流的吹送压力降低规定压力(-δp)。另一方面,在输送物确认信息ej为“ng”,而且输送物ca的姿势变更时的转动角度过小时(图6中的(d)所示的情况),即为“ng
‑”
时,使气流的吹送压力增大规定压力( δp)。另外,当上述确认区域db(dbj)中未检测到输送物ca本身时,例如通常是在一个图像aj或多个图像aj的任一图像中,均未在确认区域db(dbj)中检测到输送物ca时,可以考虑是因为从喷气口op吹送的气流的吹送压力不足而导致输送物ca未从输送路121上移动到输送路122上而返回到输送路121,或者因为上述吹送压力过大而导致输送物ca移动到输送路122之后在惯性作用下返回输送路121上等,因此,如果此时的姿势变更的动作形态的设定值(上述吹送压力)超过规定的阈值,则使气流的吹送压力降低规定压力(-δp)。另一方面,如果该设定值在规定的阈值以下,则使气流的吹送压力增大规定压力( δp)。需要说明的是,对上述δp在任何情况下都相同的情况进行了说明,但δp也可以根据情况而进行各种变更,或者,也可以通过与姿势变更时的动作形态偏离适当值的程度相应的比例控制来增大或减小δp。
57.相对于此,无论输送物确认信息ej或输送物姿态变更信息gij如何,在姿势变更部位处的输送物ca的姿势变更时的姿势如图5中的(f)的b6
′
那样相对于输送方向f具备负的倾斜角时,或者如图5中的(g)的b7
′
那样相对于输送方向f具有正的倾斜角时,如下进行处理。首先,当该倾斜角小于规定的基准角度θ,例如小于
±
10度时,不对动作形态进行任何调整。另外,当正的倾斜角超过上述基准角度θ(10度)时,将气流的吹送时机提前δt。当负的倾斜角小于上述基准角度θ(10度)时,将气流的吹送时机延迟δt。需要说明的是,对上述δt在任何情况下都相同的情况进行了说明,但δt也可以根据情况进行各种变更,或者,也可以通过与姿势变更时的动作形态偏离适当值(0度)的程度相应的比例控制增加或减少δt。如上所述,即使在具备多个输送姿势的情况下,也通过根据由输送物确认单元e得到的输送物确认信息ej或者输送物姿势变更信息gij调整和设定输送物姿势变更单元c的动作形态,从而能够通过输送物姿势变更单元c适当地执行输送物ca的姿势变更,由此能够高效地统一(控制)输送物ca的输送姿势。
58.在图7的(c)图中,示出了作为通过如上所述进行了调整和优化的姿势变更控制部103将输送物ca的多个输送姿势cn1~cn4统一为cn1时的一例,而设置沿输送路121的输送方向f排列的三个姿势变更部位的情况。在此,若以应统一的输送姿势cn1为基准(0度),则例如在将姿势变更时的转动角度设为 90度时,输送物ca围绕沿着输送方向f的轴的旋转角度可以举出cn2为-90度、cn3为-180度、cn4为-270度的例子。在该例子中,在第一姿势变更部位处,输送姿势cn1的输送物ca原封不动地朝向下游侧通过,输送姿势cn2的输送物ca在姿势变更部位处被从喷气口op吹送的气流变为输送姿势cn1,输送姿势cn3的输送物ca在姿势变更部位处被从喷气口op吹送的气流变为输送姿势cn2,输送姿势cn4的输送物ca在姿势变更部位处被从喷气口op吹送的气流变为输送姿势cn3。接着,在第二姿势变更部位处,输送姿势cn1的输送物ca原封不动地朝向下游侧通过,输送姿势cn2的输送物ca在姿势变更部位处被从喷气口op吹送的气流变为输送姿势cn1,输送姿势cn3的输送物ca在姿势变更部位
处被从喷气口op吹送的气流变为输送姿势cn2。然后,在第三姿势变更部位处,输送姿势cn1的输送物ca原封不动地朝向下游侧通过,输送姿势cn2的输送物ca在姿势变更部位处被从喷气口op吹送的气流变为输送姿势cn1。在具备以上那样的多个姿势变更部位的输送装置中,上述高效的输送姿势的变更变得更加有效,能够以高输送效率可靠地供给输送姿势统一的输送物ca。在上述多个姿势变更部位的每一个部位处,均可有效采用本实施方式中所述的上述各构成,优选在所有的姿势变更部位处有效采用上述各构成。
59.<动作程序10p的构成>
60.接着,参照图8对本发明涉及的各实施方式的整体的动作程序10p的流程进行说明。图8是表示通过上述检查处理单元dtu的运算处理装置mpu根据动作程序10p执行的输送管理用的各种处理过程的概略流程图。当该动作程序10p启动时,首先开始进行上述图像拍摄及图像测量处理,并通过控制器cl11、cl12开始驱动输送装置(送料器11及直线送料器12)。然后,若与上述调试操作对应的调试设定为off,则对拍摄图像gpx或图像区gpy执行图像测量处理,进行输送物筛选处理和输送物姿势变更控制处理(包括上述输送物辨别处理和上述输送物确认处理)等。在此,若该输送物筛选处理或上述输送物辨别处理的最终判断结果为“ok”判断,则只要不进行调试操作,就直接实施下一个拍摄图像gpx或图像区gpy的图像测量处理。例如,在上述输送物筛选处理用的输送物排除部位处,平时停止从喷气口op流出气流,但在判断结果为“ng”(不良品)时,从喷气口op流出气流。由此,将不良的输送物ca从输送路上排除。另外,在上述姿势变更部位处,平时停止从喷气口op流出气流,但在判断结果为“ng”(不良姿势)时,在从喷气口op喷出气流使输送物ca从输送路121向输送路122移动的过程中变更输送物ca的姿势,执行翻转等。此外,也可以与上述相反,平时流出气流,但在判断结果为“ok”(正确姿势)时停止气流。
61.通过这样,通过在输送路上对作为输送物的输送物ca进行辨别,并根据该辨别结果进行处理,从而仅将良品或良好姿势的输送物ca以排列整齐的状态向下游侧供给。该情况下,只要之后不进行调试操作,也直接对下一个拍摄图像gpx、或者在下一个图像区gpy的测量区域内实施图像测量处理和输送物辨别处理。在此,在输送物姿势变更控制处理部100所进行的输送物辨别处理中,如上述那样针对某个输送物ca进行处理,但通常对于接着陆续输送至作为测量区域的判断区域da内的多个输送物ca,并行地分别对每个输送物ca进行同样的输送物辨别处理。另外,仅对根据该辨别结果ci进行了姿势变更的输送物ca进行上述输送物确认处理。进而,也可以与上述图像测量处理或输送物辨别处理并行地进行追踪输送路上的输送物ca的输送举动检测处理,以便例如检测在输送路上沿输送方向f输送时的输送物ca的输送举动。而且,也可以控制输送装置的驱动以便根据该输送举动检测处理的检测结果调整输送状态。该输送驱动的控制例如通过控制输送装置的激振机构的激振元件的驱动条件、例如压电驱动体的频率或电压,从而调整为适当的输送状态。此外,上述输送举动检测处理也可以与上述输送物姿势变更控制处理部100的输送物辨别处理过程并行地执行,或者,也可以与上述输送物辨别处理过程无关而完全通过另外的图像处理执行。例如,通过根据在输送路121上沿输送方向f移动时的输送物ca在与输送方向f正交的方向上的位置变动的大小来控制振动的频率和振幅,从而能够防止输送物ca在输送路121上不必要地晃动。
62.当在上述途中进行调试操作,且调试设定变为“on”时,退出上述程序(运转模式),
停止驱动输送装置,也停止进行图像测量处理、输送物筛选处理、输送物姿势变更控制处理、输送举动检测处理等。然后,当在该状态下进行了适当的操作时,变为能够选择过去的图像文件的状态。此时,选择显示的图像文件是包含在稍前的运转模式下记录的多张拍摄图像gpx或图像区gpy的图像文件。若直接选择该图像文件并进行适当的操作,则转移至重新执行模式。在该模式下,可以根据记录有如上所述已执行的图像测量处理、输送物筛选处理、输送物姿态变更控制处理或上述输送举动检测处理等的结果的图像文件,再次执行图像的显示、各种处理或控制等。即,当在作为输送装置的输送物的输送物ca的控制(排除或翻转等)中发生不良状况时,为了消除该不良状况,首先根据过去的图像数据再次执行图像处理,从而探查各处理或控制等的问题所在。若判明该问题所在,则可以相应地对各处理或控制的设定内容(设定值)进行变更、调整,并通过再次对过去的图像数据重新执行图像测量处理等来确认调整、改善作业的结果。然后,当进行适当的恢复操作时,调试设定恢复为off,重新开始进行图像测量处理,并且重新开始驱动输送装置。
63.此外,在上述调试操作时,也可以根据上述输送物确认信息ej或输送物姿势变更信息gij,取代上述输送物姿势变更设定单元h(输送物姿势变更处理)而手动调整上述姿势变更部位的动作形态。例如,也可以调整图7中的(a)所示的姿势变更控制部103的控制形态。
64.在本实施方式中,由于通过得到输送物确认信息ej,能够确认通过输送物姿势变更单元c的动作而产生的输送物ca的姿势变更状态,因此,通过一边确认该信息一边调整输送物姿势变更单元c的动作形态,调整作业变得容易,而且姿势变更部位的输送物的姿势变更形态高精度化。
65.特别是,通过还具备求出表示输送物辨别信息bi与输送物确认信息ej的关系的输送物姿势变更信息gij的输送物姿势变更判断单元g,能够更加容易地确认输送物姿势变更单元c的动作形态与通过输送物姿势变更单元c的动作而产生的输送物ca的姿势变更状态之间的关系。
66.在本实施方式中,输送物确认单元e通过对得到了辨别结果ci的输送物ca在上述姿势变更部位处被输送物姿势变更单元c变更姿势后配置的确认区域db的图像部分进行图像处理而求出所述输送物确认信息ej,从而既能抑制图像处理的负荷,又能可靠且迅速地确认姿势变更后的输送物ca的姿势。尤其是,通过将确认区域db在相对于包含判断区域da的图像部分的图像ai经过了既定时间的时间点及其之后拍摄的别的图像aj(j>i)中设定为与所述姿势变更部位具有既定的位置关系的图像部分,能够更高维度地同时实现图像处理的负荷及处理时间的减轻、和姿势确认的可靠性和精度的提高。
67.在本实施方式中,还具备控制输送物姿势变更单元c的动作形态的姿势变更控制部103,姿势变更控制部103根据输送物确认信息ej或者输送物姿势变更判断单元g输出的输送物姿势变更信息gij自动地设定输送物姿势变更单元c的动作形态,从而能够根据输送物确认信息ej、或者表示输送物辨别信息bi与输送物确认信息ej的关系的输送物姿势变更信息gij自动地调整输送物姿势变更单元c的动作形态,因而既能减少调整作业的麻烦,又能提高姿势变更的准确性。
68.在本实施方式中,所述输送物姿势变更单元c通过向所述输送物吹送气流来变更姿势,但所述输送物姿势变更设定单元h最好作为所述动作形态而设定所述气流的吹送时
机和吹送压力的至少一者。由此,能够迅速且适当地变更微小输送物ca的姿势变更时的动作形态。
69.在本实施方式中,还具备针对每个图像aj或每个输送物ca而预测确认区域db的位置或范围的确认区域预测单元d,从而能够同时实现获取与输送物ca的姿势变更后的姿势相关的信息的可靠性的提高和图像处理的负担的减轻。
70.在本实施方式中,所述判断区域da和所述确认区域db均为上述图像ai、aj的内部包含的区域,从而能够在单个图像内设定输送物辨别处理和输送物确认处理中使用的两个区域,因而能够使两个区域之间的位置关系的设定变得容易,并且有望简化照相机等的拍摄系统。
71.此外,本发明的输送系统并不仅限定于上述图示例,当然可以在不脱离本发明的主旨的范围内增加各种变更。例如,在上述实施方式中,在同一图像ai、aj的内部设定判断区域da和确认区域db,并在这些区域进行图像处理,但本发明并不限于这样的方式,也可以分别获得具备判断区域da的图像和具备确认区域db的图像,也可以用不同的照相机(拍摄装置)进行拍摄。另外,在上述实施方式中,通过使输送物姿势变更单元c针对输送路121上的输送物ca进行动作而将姿势变更后的输送物ca配置于输送路122上,但也可以在同一输送路121上使输送物ca的输送姿势发生变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。