用于确定mems装置的镜体的扭转角的方法
技术领域
1.本公开涉及用于确定mems装置的镜体的扭转角的方法。本公开还涉及可以通过这样的方法操作的mems装置。
背景技术:
2.mems(微机电系统)装置可以是例如lidar(光检测和测距)扫描装置,例如其例如可以应用在全自动或部分自动的自行驶汽车中。在这样的装置中,可以使用具有可控扭转角的镜体,以便能够沿不同方向反射光。镜体的扭转角可以取决于施加到静电梳状驱动器上的电压。对于mems装置的适宜操作,应确保镜体实际上被偏转了通过电压设置的扭转角。mems装置制造商一直在努力改善其产品。特别地,可能期望提供用于确定mems装置的镜体的扭转角的改进方法。
技术实现要素:
3.各个方面涉及一种方法。该方法包括向mems装置的静电梳状驱动器施加驱动电压。该方法还包括将周期性电压信号与驱动电压叠加。该方法还包括基于周期性电压信号,确定mems装置的镜体的扭转角。
4.各个方面涉及一种mems装置。mems装置包括镜体和一个或多个静电梳状驱动器,所述静电梳状驱动器用于基于一个或多个驱动电压来旋转镜体。mems装置还包括用于将一个或多个周期性电压信号与一个或多个驱动电压叠加的单元。mems装置还包括用于基于一个或多个周期性电压信号来确定镜体的扭转角的单元。
附图说明
5.下面参考附图更详细地解释根据本公开的方法和装置。附图中所示的元件不必相对于彼此按比例绘制。相同的附图标记可以指定相同的组件。
6.图1示出了根据本公开的mems装置100的示意性俯视图。
7.图2示出了根据本公开的mems装置200的示意性截面侧视图。
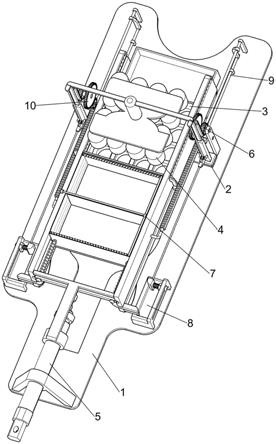
8.图3示出了根据本公开的mems装置300的示意性透视图。
9.图4示意性地示出了根据本公开的mems装置400。
10.图5示意性地示出了根据本公开的mems装置500。
11.图6示出了根据本公开的mems装置的镜体的取决于扭转角的电压曲线和电容曲线。
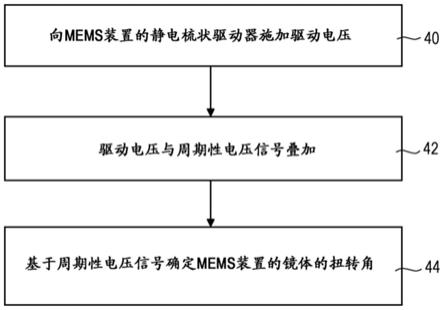
12.图7示出了根据本发明的方法的流程图。
13.图8示意性地示出了根据本公开的mems装置800。
14.图9示出了根据本公开的mems装置900的示意性俯视图。
15.图10示意性地示出了根据本公开的mems装置1000。
具体实施方式
16.下面描述的附图示出了mems装置以及用于操作这种mems装置的方法。可以以一般方式呈现所描述的装置和方法,以便定性地描述本公开的各方面。为了简单起见,所描述的装置和方法可以具有在相应附图中未示出的其他方面。然而,可以将各个示例扩展为包括结合根据本公开的其他示例所描述的方面。因此,对特定附图的陈述可以等同地应用于其他附图的示例。
17.图1的mems装置100可以具有镜体(或扫描器主体)2、(特别是刚性的)框架4和悬架结构6。镜体2可以设计成绕枢轴或旋转轴a旋转。两个相对的悬架结构6可以将镜体2与框架4机械连接。例如,每个悬架结构6均可以具有扭杆形式的弹簧元件,尽管悬架结构6不限于这种特定的示例性实施例。悬挂结构6或弹簧元件可以基本平行于镜体2的枢轴a延伸或限定。
18.在mems装置100的操作期间,可以驱动镜体2,使得其绕枢轴a摆动。由镜体2反射的光可以由此而来回振荡,并且例如可以用于扫描周围环境。在一示例中,由镜体2反射的光可以由激光源(未示出)提供。mems装置100可以是例如lidar扫描装置,其例如可以应用在全自动或部分自动的自行驶汽车中。
19.mems装置100可以具有用于驱动镜体2的驱动器。这种驱动可以通过一个或多个静电梳状驱动器8a至8d来实现,该静电梳状驱动器8a至8d可以布置在镜体2处。梳状驱动器8a至8d中的每个均可具有第一驱动结构、例如具有第一梳状电极的梳状结构(在镜体2处),并且具有第二驱动结构、例如具有第二梳状电极的梳状结构(在框架4处)。可以向驱动器施加驱动信号、尤其是周期性变化的驱动电压,以使镜体2围绕枢轴a摆动。
20.在图1的示例中,mems装置100可以具有例如四个梳状驱动器8a至8d,它们可以布置在枢轴a的左侧和右侧。在这种情况下,各两个梳状驱动器8可以彼此面对并且相对于枢轴a对称地布置。每个梳状驱动器8a至8d可以分别具有带有多个梳指指12的第一梳状结构10,在图1的示例中,这些梳指可从沿着枢轴a延伸的部段14出发并且可基本彼此平行地延伸。此外,每个梳状驱动器8a至8d可以分别具有带有多个梳指18的第二梳状结构16在图1的示例中,这些梳指能从框架4出发并且同样能基本上彼此平行地延伸。在实践中,每个梳状结构10和16可以具有多达约一百个或更多的梳指12和18。
21.梳状驱动器8a至8d可用于静电控制和驱动mems装置100或镜体2。每个梳状驱动器8a至8d可以分别具有两个(叉指式)梳状结构10和16。固定在镜体2的部段14上的第一梳状结构10可以称为“转子”。与此相应地,第一梳状结构10的梳指12可以被称为转子梳指。固定在框架4以及梳指18上的第二梳状结构16可以称为“定子”以及定子梳指。转子梳指12和定子梳指18可以彼此错开地布置,使得它们互锁并能够绕枢轴a摆动。
22.每个梳状驱动器8a至8d的定子和转子可以形成电容器的电极。(共振的)mems扫描装置100可以被解读为共振激发的质量弹簧阻尼器系统。通过向梳状驱动器电容器、即在转子和定子之间施加交流电压u,可以将能量馈送到该质量弹簧阻尼器系统中。电压u尤其可以是单极交流电压u,其频率大约是mems扫描装置的机械自然共振频率的两倍。通过施加的交流电压可将振荡器驱动为谐振状态。两次可以将储存在电容为c的电容器中的能量1/2cu2在每个振荡周期中两次耦合到振荡器的动能中。
23.除了谐振操作的mems扫描装置之外,还存在具有静电梳状驱动器的准静态操作的
mems扫描装置100。针对这些扫描装置,通过向关于枢轴a的一侧(例如右侧)上的梳状结构施加电压u,可以在镜体2上施加扭矩。结果,镜体2可偏转到一个角度,在该角度,弹簧元件6产生的复位扭矩等于静电产生的扭矩。如果向关于枢轴的另一侧上的梳状结构施加电压u,则镜体2在相反方向上偏转。该操作需要定子和转子指状件的拓扑结构,在该拓扑结构的情况下在静止位置,静电产生的转矩不会消失或足够大。电压u以一速率而改变以扫描不同角度,应当注意,该速率应该足够低,从而可以避免质量弹簧阻尼器系统的共振激励。这尤其可以意味着,u的变化率可以显著低于质量弹簧阻尼器系统的共振频率。但是,在这种情况下应该注意的是,采用合适的调节技术,通过电压u的合适的时间曲线将转子加速到最大,然后主动制动。
24.图2示出了根据本公开的mems装置200的示意性截面侧视图。例如,图2中的图示可以对应于或类似于图1的mems装置100在梳状驱动器8a和8b的高度处沿x-z平面的横截面。mems装置200可以具有转子10、左定子16a和右定子16b,已经结合图1描述了它们的功能和构造。
25.左定子16a和右定子16b可以类似地构造,因此在下文中仅参考左定子16a。左定子16a可以由包括上装置层20和下装置层22的层堆叠构成,上装置层和下装置层可以彼此电隔离。每个装置层20和22可以由半导体材料、特别是硅制成。在一示例中,顶部装置层20可以包括多晶硅,而下装置层22可以包括单晶硅。在这种情况下,可以在装置层20和22之间布置电绝缘层(未示出)。例如,该绝缘层可以由氧化物制成,从而形成硅-氧化物-硅的叠层。此外,取决于所使用的制造技术,晶籽层(未示出)也可以位于装置层20和22之间。在另一个示例中,每个装置层20和22可以由单晶硅制成。在这种情况下,例如,两个装置层可能已经通过键合工艺彼此连接。
26.转子10也可以由具有上装置层24和下装置层26的叠层构造。在这种情况下,关于定子16a和16b的先前评论也可以适用于转子10。在图2的示例中,可以例如通过蚀刻工艺在与定子16a和16b重叠的位置处去除上装置层24。当向转子10以及定子16a和16b施加电压时,转子10的全部下装置层26可以处于相同的电势。在相应的定子和转子10之间形成的电容可以取决于(并且尤其成比例地)相应定子的上装置层20和转子10的下装置层26之间的重叠区域。因此,相应电容可以取决于这些层之间的角度φ。角度φ在此可以对应于mems装置200的镜体2的扭转角φ。
27.图3的mems装置300可以至少部分地类似于上述附图的mems装置并且具有相同的组件。从图3的透视图中可以再次看到,转子10的上装置层24的特定部段并不存在或已经被去除,如已经结合图2所描述的。
28.图4的mems装置400以示意图示出。已经结合先前的附图描述了mems装置400的部件(定子、转子和所属装置层)。在图4的示例中,转子10或其装置层26可以相对于定子16a和16b旋转一个扭转角φ。通过该旋转,可以在左定子16a的上装置层20与转子的左侧部分或其下装置层26的左侧部分之间形成电容c
l
。以类似的方式,可以在右定子16b的上装置层20与转子的右侧部分或其下装置层26的右侧部分之间形成电容cr。
29.图5的mems装置500以示意图示出。除了已经结合先前附图描述的组件之外,mems装置500可以具有用于确定和控制镜体2的扭转角的附加组件。mems装置500可以具有如已经结合先前的附图所描述的镜体2、左定子16a(参见sl)、右定子16b(参见sr)和转子10。此
外,mems装置500可以具有左电压源28a(参见hv,“高压”)、右电压源28b、左电阻30a、右电阻30b、左电容器32a、右电容器32b所示、镜驱动器34和具有存储器(未示出)的处理器36。所提到的组件可以例如以图5所示的方式相互连接。
30.可以经由左电压源28a在地电势与左定子16a或其上装置层之间施加(高)电压hv
l
。左电压源28a可以是例如双极高压晶体管。在谐振操作的mems装置的情况下,电压hv
l
可以假定是小于大约100v的值,而在准静态操作的mems装置的情况下,可以存在从大约200v至大约300v的范围内的电压值。以类似的方式,可以经由右电压源28b在地电势与右定子16a或其上装置层之间施加(高)电压hvr。
31.左电阻30a可以用于左电压hv
l
的测量,其中电阻30a的值可以在mω范围内。电阻30a可以特别地与镜驱动器36的跨阻放大器(未示出)的输入连接。右电阻30b可以类似于左电阻30a并且具有相似的功能。左电容器32a可以被设计成保持调节回路稳定,这将在下面结合图8进一步描述。电容器32a的电容值可以在pf范围内。右电容器32b可以类似于左电容器32a并且具有相似的功能。
32.镜驱动器34可以被设计为控制电压源28a,28b,以便能够由此支配向梳状驱动器施加的电压hv
l
和hvr。此外,镜驱动器34可被配置为从处理器36接收用于控制电压源28a,28b的命令,并将向处理器36发送报告。镜驱动器34可以与用于确定转子10处的测量信号的测量输出(或测量节点)电连接。测量输出例如可以设计成转子10的转子引脚38的形式。镜驱动器34或其中包含的组件可以通过转子引脚38获取测量信号,该测量信号可以被报告给处理器36。例如,测量信号可以是电压(特别是在高欧姆电阻测量的情况下)或电流(特别是在低欧姆电阻测量的情况下)。转子引脚38可以例如布置在mems装置500的框架上并且相对于地电势绝缘,以防止待测量的电流流走。
33.处理器36可以例如以asic(专用集成电路)电路的形式实现实施、或包括这种电路。处理器36可以将命令发送到镜驱动器34,并基于此通过镜驱动器来设置向梳状驱动器施加的电压hv
l
和hvr。由于镜体2的扭转角φ可以取决于差值hv
r-hv
l
,因此处理器36通过镜驱动器34可以被设计为控制和设置镜体2的扭转角φ。扭转角φ与电压差hv
r-hv
l
的相关性尤其可以是非线性的。当扭转角φ改变时,可以通过在转子引脚38处测得的电流来检测镜体2的所属的旋转运动。处理器36中实现的逻辑(例如以软件形式)可以基于在转子引脚38处测得的电流来调节或重新调节电压hvr和hv
l
。例如,在准静态操作的mems装置的情况下,电压hvr、hv
l
可以具有任何合适的形式,以便尽可能快地设置新的扭转角φ并主动制动镜体2的运动、,并且防止或减弱机械振动,这通过监测镜体2的运动并对此相应地做出反应来实现。为了调节扭转角φ,可以将一个或多个映射存储在处理器36的存储器中。在图5中,以下映射可以被存储在存储器中:φ(hv)、c
l
(φ)、cr(φ)。
34.在图6中,绘制出电压hvr和hv
l
相对于镜体2的扭转角φ的示例性曲线。此外,图6示出了电容c
l
和cr取决于扭转角φ的示例性曲线。扭转角轴线的比例在图6中可以特别是非线性的。例如,所示的角度可以在从大约-15度到大约 15度的范围内。
35.从图6基本上可以看出,所示区域中的电容值随扭转角φ的增加而上升。在这种情况下,在扭转角φ为最大值(大约-15度或 15度)情况下,电容c
l
和cr的值基本上可以是最大值。在扭转角φ为更高值(未示出)的情况下,电容c
l
和cr的值可能会再次减小。实际上,最大电容值可以通过任意高的电压来近似,但不能完全实现,这是因为如果电容器的装置层之
间的空气中的电压过高,则会发生电击穿。这些电击穿一方面是由于气隙的小尺寸、另一方面是由于施加的电压高达几百伏而引起的。
36.图7示出了根据本公开的用于确定和调节mems装置的镜体的扭转角的方法。以一般方式呈现图7的方法以定性地描述本公开的各方面。为了简单起见,该方法可以具有在图7中未示出和描述的其他方面。例如,该方法可以被扩展有结合本文描述的其他示例解释的一个或多个方面。
37.在40处,可以向mems装置的静电梳状驱动器施加驱动电压。在42处,驱动电压可以与周期性电压信号叠加。在44处,可以基于周期性电压信号来确定mems装置的镜体的扭转角。
38.图7的方法可以例如利用在图8中示意性示出的mems装置800来执行。mems装置800可以至少部分地类似于图5的mems装置500,并且可以具有相似的组件。由下面描述的mems装置800执行的处理过程可以被视为图7的方法的更细化版本。
39.在图8的示例中,可以在一个处理过程中将第一驱动电压hv
l
施加到左定子16a,该第一驱动电压可以与第一周期性电压信号fusa
l
叠加。换句话说,可以将电压hv
l
fusa
l
施加到左定子16a。以类似的方式,可以将第二驱动电压hvr施加到右定子16b,该第二驱动电压可以与第二周期性电压信号fusar叠加,从而可以将电压hvr fusar施加到右定子16b上。驱动电压与周期性电压信号的叠加可以例如由镜驱动器34和/或处理器36通过命令来提供。
40.周期性电压信号fusa
l
和fusar尤其可以基本上反相。此外,周期性电压信号fusa
l
和fusar的频率均可以高于mems装置800或镜体2的谐振频率。特别地,周期性电压信号fusa
l
和fusar的频率均可以在从大约1mhz到大约100mhz的范围内,更准确地说是在大约10mhz到大约100mhz的范围内。周期性电压信号fusa
l
和fusar的幅度均可以在从大约0.1v到大约1v的范围内。幅度不应超过某个极限值,以避免违反可能的emc(电磁兼容性)规定。
41.电压信号fusa
l
和fusar可以具有任意的周期性分布。例如,周期性电压信号可以是ac(交流)信号。特别地,电压信号fusa
l
和fusar可以具有随时间尽可能均匀分布的比例dv/dt,因为这可以最终在转子引脚8处提供可测量的电流。在理想情况下,周期性电压信号fusa
l
和fusar可以具有三角形走势,这可以在转子引脚38处产生可测量电流的矩形电流走势。实际上,周期性电压信号的走势可以对应于或近似于正弦走势。在第一示例中,周期性电压信号可以包括或对应于类噪声伪随机信号以便不发射离散频率。在这种情况下,可以借助于相互关系(korrelation)来提供解调。在另一个示例中,周期性电压信号可以包括频率扩展信号。
42.在进一步的处理过程中,可以基于周期性电压信号fusa
l
和fusar来确定mems装置800的镜体2的扭转角φ。在此,可以在转子引脚38处确定基于周期性的电压信号fusa
l
和fusar的测量信号。测量信号可以是例如在转子引脚38处检测到的电流或在该处检测到的电压。在图8的示例中,跨阻放大器46可以连接在转子引脚38的下游。取决于扭转角φ的电容c
l
和cr可以形成用于周期性电压信号fusa
l
和fusar的电容分压器。因此,测量信号尤其可以基于周期性电压信号的商
43.在另一处理过程中,可以将在转子引脚38处测得的测量信号映射到扭转角φ上。为此使用的映射可以存储在例如存储器中,该存储器可以是镜驱动器34和/或处理器36的
一部分。该映射可以提供在转子10的测量信号和扭转角φ之间的分配关系,即,可以通过该映射为每个检测的测量信号分配对应的瞬时存在的扭转角φ。存储在存储器中的映射可以是针对mems装置800单独协调的映射。在这种情况下,可以在例如mems装置800的校准期间生成所存储的映射。镜驱动器34和/或处理器36可以提供基于周期性电压信号的映射或确定扭转角φ的应用。
44.在第一示例中,可以使用通过直接测量方法来确定扭转角φ。此时周期性电压信号fusa
l
和fusar可以具有基本相同的幅度,并且满足条件
45.uf~u
fusa
·
(c
l-cr)
ꢀꢀꢀ
(1)。
46.在此uf是在转子10处检测到的测量信号,c
l
是左定子16a与转子10之间的电容,cr是右定子16b与转子10之间的电容,u
fusa
是周期性电压信号fusa
l
和fusar的幅度。
47.在第二示例中,可以通过间接测量方法来确定扭转角φ。可以调节周期性电压信号fusal和fusar的幅度,从而满足条件
48.fusa
l
·cl
fusar·cr
=0
ꢀꢀꢀ
(2)。
49.在此fusa
l
是第一周期性电压信号,fusar是第二周期性电压信号,c
l
是左定子16a与转子10之间的电容,cr是右定子16b与转子10之间的电容。
50.该间接测量方法可以基于调节回路,其中周期性电压信号fusa
l
和fusar可以被调整或调节,以保持满足条件(2)。特别地,可以调节周期性电压信号fusa
l
和fusar的幅度,以使在转子引脚38处检测的测量信号为零。这可以具有如下效果:在转子引脚38处检测的信号以加速角度变化的调节器不会被在转子引脚38处检测的信号影响。另一效果可以是,当使用跨阻放大器来测量转子引脚38处的电流时,跨阻可以更高,进而角度分辨率可以更好。例如,周期性电压信号fusa
l
或fusar可以经由电容器32a或32b耦合到调节回路中。
51.在一实例中,mems装置800可以具有共振操作的镜体2。在这种情况下,驱动电压hv
l
和hvr可以是交流电压,并且可以通过所描述的方法连续地检测扭转角φ。在另一示例中,mems装置800可以具有准静态操作的镜体2。在这种情况下,驱动电压hv
l
和hvr可以分别是可调节的直流电压,并且可以通过所描述的方法来检测准静态扭转角φ。
52.在进一步的处理过程中,在电磁辐射被镜体2反射之前,可以检测并验证镜体2的扭转角φ。由此可以检查并确保镜体2实际上已经旋转了设定的扭转角φ,即,电磁辐射被镜体2以正确或期望的角度反射。因此,可以确定反射角,而无需发生实际反射电磁辐射,或在发生实际反射电磁辐射之前可以确定反射角。应当注意的是,通过在此描述的方法,在反射电磁辐射的同时还可以检测和验证扭转角φ。
53.在常规的mems装置中,可以使用监视系统、例如通过摄像机来检查镜体的扭转角。监视系统或摄像机可以测量在由光源发射的光束与在通过镜体扭转角限定的方向上由镜体反射的光束之间的角度。在此,监视系统仅仅在光源发出光脉冲之后监视镜体的扭转角。但是,在发射光脉冲之前,该系统无法监视镜体的扭转角。如上所述,与此相反,通过本文所述的mems装置或所属方法,可以在发射光脉冲之前以精确的方式确定扭转角。另外,由于精确地检测和调节了扭转角,因此可以提供相应的mems装置或上级应用(例如,汽车应用)的功能安全性。
54.在常规的mems装置中,镜体的扭转角也可以借助于转子上的压电电阻或磁体来测量。此外,可以使用psd(位置感测装置)测量光源的反射。这些常规方法在镜体或mems装置
的制造过程中需要相当大的额外消耗。与此相反,在本文所述的mems装置或所属方法的情况下,可以避免这种额外消耗,即,可以提供对扭转角成本有效且精确的检测和调节。
55.图7的方法和结合图8描述的方法可以具有附加的处理过程,为了简单起见,未能对其全部更详细地说明。例如,所描述的方法可以具有其他过程,在此基础上还可以对扭转角φ的所述测量进行附加检查。在一个示例中,为了检查图8中所示的装置的正确功能,可以暂时地同相施加周期性的电压信号fusa
l
和fusar,或者可以暂时地屏蔽这两个信号之一。根据镜体的当前预期扭转角φ和在该角度时c
l
和cr的已知值,所得的测量出的ac信号应与预期值一致。
56.图9的mems装置900可以至少部分地类似于图1的mems装置100。类似于图1,mems装置900可以例如具有带有转子和定子的四个梳部(左上、右上、左下、右下)。与图1不同,四个梳部中的每一个都可以分为两个部段。相应梳部的第一部段48a可以(特别地只)设计成引起镜体2的偏转(参见“驱动左侧”、“驱动右侧”)。为此,可以将上面已经讨论的用于驱动镜体2的电压hv施加到该第一梳状部段48a上。梳部的第一部段48a因此可以类似于图1的梳状驱动器8。如上所述,相应梳部的第二部段48b可以(特别地只)设计成基于周期性电压信号来对镜体2的扭转角进行检测或测量(参见“检测左侧”、“检测右侧”)。在此,驱动电压hv不能施加到梳部的第二部段48b上。梳部的两个分开的部段48a、48b或其电容的示例性互连在图10中示出和讨论。
57.图10的mems装置1000可以至少部分地类似于图5和8的mems装置500和800。与图8不同,mems装置1000可具有四个电容c
l_act
、c
r_act
、c
l_sense
和c
r_sense
。电容c
l_act
可以对应于左梳部的第一部段48a,电容c
r_act
对应于右梳部的第一部段48a,电容c
l_sense
对应于左梳部的第二部段48b,并且电容c
r_sense
对应于右梳部的第二部段48b(参见图9)。电容c
l_act
和c
r_act
可以特别地类似于图1的电容c
l
和cr。
58.驱动电压hv
l
或hvr可以以已经结合图5和8描述的方式施加到左梳部的第一部段48a或右梳部的第一部段48a。此外,可以将周期性电压信号fusa
l
或fusar施加到左梳部的第二部段48b或右梳部的第二部段48b。图10中所示的从周期性电压信号fusa
l
、fusar分离出驱动电压hv
l
、hvr可以提供电势分离的优点。由此,可以在低压范围内直接测量扭转角,并且周期性电压信号fusa
l
、fusar不必电容性耦合到驱动电压hv中。
59.在上述示例中,镜体可以被设计为仅可绕一个轴线旋转。在这种情况下,通过两个叠加有两个周期性电压信号的驱动电压示例性说明了对扭转角的检测和控制。应当注意,本文描述的概念还可以扩展到具有可绕多于一个轴线旋转的镜体的mems装置。相应地,可以基于附加的梳状驱动器、附加的驱动电压和附加的周期性电压信号来对多个扭转角进行相关的控制和检测。
60.示例
61.在下文中,使用示例解释根据本公开的方法和装置。
62.示例1是一种方法,包括:向mems装置的静电的梳状驱动器施加驱动电压;将所述驱动电压与周期性电压信号叠加;以及基于所述周期性电压信号,确定所述mems装置的镜体的扭转角。
63.示例2是根据示例1所述的方法,其中,向静电的所述梳状驱动器施加所述驱动电压包括:向所述梳状驱动器的第一定子施加第一驱动电压;以及向所述梳状驱动器的第二
定子施加第二驱动电压。
64.示例3是根据示例2所述的方法,其中,将所述驱动电压与周期性电压信号叠加包括:将所述第一驱动电压与第一周期性电压信号叠加;以及将所述第二驱动电压与第二周期性电压信号叠加。
65.示例4是根据示例3所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号基本上是相位相反的。
66.示例5是根据示例3或4所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号的频率分别高于所述mems装置的谐振频率。
67.示例6是根据示例3至5中任一项所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号的频率分别在1mhz至100mhz的范围内。
68.示例7是根据示例3至6中任一项所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号的幅度分别在0.1v至1v的范围内。
69.示例8是根据示例3至7中任一项所述的方法,还包括:确定所述梳状驱动器的转子处的测量信号,所述测量信号基于所述第一周期性电压信号和所述第二周期性电压信号。
70.示例9是根据示例8所述的方法,其中,确定所述扭转角包括:基于在所述梳状驱动器的所述转子处的测量信号与扭转角之间的存储映射,将所述测量信号映射到所述扭转角。
71.示例10是根据示例9所述的方法,还包括:在所述mems装置的校准期间,生成所述存储映射。
72.示例11是根据示例8至10中任一项所述的方法,其中,所述测量信号基于商其中:fusa
l
是第一周期性电压信号,并且fusar是第二周期性电压信号。
73.示例12是根据示例8至11中任一项所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号具有基本相同的幅度,并且满足条件uf~u
fusa
·
(c
l-cr),其中:uf是测量信号,c
l
是第一定子与转子之间的第一电容,cr是第二定子与转子之间的第二电容,并且u
fusa
是所述周期性电压信号的幅度。
74.示例13是根据示例8至11中任一项所述的方法,还包括:调节所述周期性电压信号的幅度,从而满足条件fusa
l
·cl
fusar·cr
=0,其中:fusa
l
是第一周期性电压信号,fusar是第二周期性电压信号,c
l
是第一定子与转子之间的第一电容,并且cr是第二定子与转子之间的第二电容。
75.示例14是根据前述示例中任一项所述的方法,其中,所述驱动电压是交流电压,并且所述镜体是谐振操作的镜体。
76.示例15是根据前述示例中任一项所述的方法,其中,所述驱动电压是能够调节的直流电压,并且所述镜体是准静态操作的镜体。
77.示例16是根据示例3至15中任一项所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号包括类噪声的伪随机信号。
78.示例17是根据示例3至16中任一项所述的方法,其中,所述第一周期性电压信号和所述第二周期性电压信号包括扩频信号。
79.示例18是根据前述示例中任一项所述的方法,还包括:在通过所述镜体反射电磁
辐射之前,验证所述镜体的所述扭转角。
80.示例19是一种mems装置,包括:镜体;一个或多个静电的梳状驱动器,用于基于一个或多个驱动电压来旋转所述镜体;用于将一个或多个驱动电压与一个或多个周期性电压信号叠加的单元;和用于基于一个或多个周期性电压信号确定所述镜体的扭转角的单元。
81.示例20是根据示例19所述的mems装置,还包括:用于确定在所述一个或多个梳状驱动器的转子处的测量信号的测量输出,其中所述测量信号基于所述一个或多个周期性电压信号。
82.示例21是根据权利要求20所述的mems装置,还包括:存储器,用于提供在所述测量信号与所述扭转角之间的映射。
83.尽管在此示出和描述了特定的实施例,但是对于本领域技术人员显而易见的是,在不脱离本公开的范围的情况下,各种替代和/或等同的实现方式可以代替示出和描述的特定实施例。本技术旨在覆盖本文所讨论的特定实施例的任何改编或变型。因此,意图是本公开仅由权利要求及其等同物限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。