1.本实用新型涉及工程机械技术领域,尤其涉及一种煤矿用的多臂掘锚机。
背景技术:
2.掘锚一体机是一种集掘、锚、支护于一体的综掘设备,实现了锚护工作的机械化作业,它可以有效的缩短锚护的辅助时间,大幅度提升掘进速度,降低操作者的工作强度,增加巷道开采的安全性。
3.近年,全国乃至全世界大大小小的煤机厂家都在纷纷投入到掘锚机研发队伍中。目前,在国内中使用过的掘锚机主要有两侧式掘锚机、龙门式掘锚护一体机及连锚机。
4.两侧式掘锚机,该掘锚机主要是以现有掘进机为平台,并利用掘进机的截割部,通过替换截割部与回转台和截割升降油缸销轴,完成锚护部与掘进机连接,锚杆钻机工作时需要借助截割部调整上下左右位置,加上自身摆动旋转等动作完成锚护工作,所以整机结构简单,思路简洁,容易实现,但截割部整体宽度加大,掘进机工作时易与侧帮发生干涉。其具体缺点在于:锚杆钻机易刮帮损坏;打锚杆时截割部不能落地,不满足安全要求;空顶距大,至少空顶一排锚杆;锚杆定位效率低;适应范围窄。
5.龙门式掘锚护一体机,该结构为锚护部定位安装于行走部两侧,掘进机工作时锚护部停靠于回转台上方和两侧,工作时利用两侧双级伸缩主臂将龙门架推移至设备最前端,龙门架可根据巷道高度升降调整高度,锚杆钻机可以在龙门架上左右横移,加上自身前后摆动、左右旋转等功能调整动作,从而完成临时支护、锚杆支护,克服了两侧式掘锚机的一些不足,解决了刮帮现象,截割头可以落地,加大临时支护面积,提高了锚杆定位效率,基本实现了零空顶距等。但仍然存在一些问题,如遮挡截割操作视线,主臂伸缩距离大管路不好布置等问题。目前,尚处于工业性试验阶段,未推广使用。
6.连锚机,该机是在连采机基础上,将锚杆钻机融合在一体上,理论上可以实现截割与支护作业的同步进行,从而提高工作效率。但该机由于锚杆钻机的工作位置距离设备最前端较远,且机身庞大,只适用于空顶距较大,且巷道尺寸较大,煤岩硬度较小的工况。国内绝大多数煤矿不能满足条件。并且从应用实践看,该机在正常工作时,效率较高。但由于设备过于复杂,且基本都是进口的,价格高昂,设备在井下拆装及调试过程需要大量的人力及时间。综合来看,该机的性价比不高,所以市场销售占有量较小。
技术实现要素:
7.本实用新型目的就是为了解决上述难题,提供一种多臂掘锚机,在掘进巷道施工时,可实现掘进、锚护连续作业,无需掘锚机后退,掘进后掘锚机不动便可通过锚护部各动作实现巷道顶锚杆、角锚杆、帮锚杆各锚护角度锚杆的锚固。
8.为实现本实用新型的上述目的,本实用新型提供一种多臂掘锚机,包括掘锚机本体,具有本体部、行走部、截割部、后支撑部,此外,还包括:设置于本体部上方的可对截割部掘进后形成的巷道同时进行顶锚护和帮锚护的第一锚护机构;设置于后支撑部后方的可与
第一锚护机构同时工作以对截割部掘进后形成的巷道进行帮锚护的第二锚护机构。
9.其中,所述本体部上设置有锚杆装置平台,所述第一锚护机构设置于锚杆装置平台上且可相对其滑动。
10.其中,所述第一锚护机构包括:用于对巷顶进行锚护的前顶锚杆机构;位于前顶锚杆机构后部的用于对巷帮进行锚护的前帮锚杆机构;位于前帮锚杆机构后部的用于对巷顶及巷道同时进行锚护的后顶锚杆机构。
11.其中,所述第二锚护机构为设置在后支撑部后方的后帮锚杆机构,用于对巷帮进行锚护。
12.进一步的,还包括固定于截割部上方的临时支护机构,用于对巷道顶板进行临时支护,并将锚网和钢带支撑到巷道顶板上。
13.优选的,所述锚杆装置平台上设置有与其滑动连接的操作台,所述第一锚护机构设置于操作台上。
14.进一步的,还包括设置在后支撑部上的用于为第一锚护机构和第二锚护机构同时进行锚护工作提供动力的液压系统。
15.优选的,所述前顶锚杆机构位于操作台的前侧。
16.优选的,所述前帮锚杆机构(4)位于操作台的上方。
17.优选的,所述后顶锚杆机构(5)位于操作台的后侧。
18.与现有技术相比,本实用新型的多臂掘锚机具有如下优点:
19.本实用新型的多臂掘锚机,当截割部工作时,锚护机构可收回于本体部两侧、行走部上方,不影响截割部回转,从而不影响掘锚机的截割作业,而当截割部不工作时,锚护机构可快速展开并对巷顶和巷帮同时进行锚护,因此可满足掘锚机掘进、临时支护和打锚杆的需要,实现掘进和支护工作的快速切换,降低人工劳动强度,提升巷道掘进的工作效率。
20.下面结合附图对本实用新型进行详细说明。
附图说明
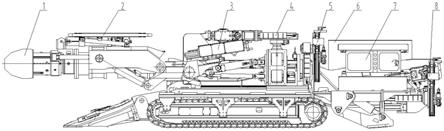
21.图1是本实用新型实施例多臂掘锚机掘进作业时的主视图;
22.图2是本实用新型实施例多臂掘锚机各锚杆机构在锚护作业时的主视图;
23.图3是本实用新型实施例多臂掘锚机各锚杆机构在锚护作业时的俯视图;
24.图4是本实用新型实施例第一锚杆机构处于工作状态时调整至各角度时的主视图;
25.图5是本实用新型实施例第一锚杆机构处于工作状态时调整至各角度时的俯视图;
26.图6是本实用新型实施例第二锚杆机构的结构示意图;
27.图7是本实用新型实施例临时支护机构处于工作状态的主视图;
28.图8是本实用新型实施例临时支护机构处于工作状态的左视图;
29.图9是本实用新型实施例机载锚杆机构的主视图;
30.图10是本实用新型实施例机载锚杆机构的俯视图。
具体实施方式
31.如图1所示,为本实用新型提供的多臂掘锚机在掘进作业时的结构示意图,如图2、图3所示,为本实用新型实施例多臂掘锚机在锚护作业时的结构示意图。由图1-图3可知,本实用新型实施例的多臂掘锚机包括:掘锚机本体1,具有掘锚机的本体部11、安装在本体部11下方的用于带动本体部11移动的行走部10、安装在本体部11前方的用于进行掘进工作的截割部9;设置于本体部11两侧和行走部10上方的可对截割部掘进后形成的巷道同时进行顶锚护和帮锚护的第一锚护机构;设置在本体部11后支撑部12后方的可与第一锚护机构同时工作以对截割部掘进后形成的巷道进行帮锚护的第二锚护机构。
32.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
33.具体的,如图1-图5所示,本实用新型实施例多臂掘锚机包括:掘锚机本体1,具有掘锚机的本体部11、安装在本体部11下方的用于带动本体部11移动的行走部10、安装在本体部11前方的用于进行掘进工作的截割部9、安装在本体部11后方的后支撑部12;设置在本体部11上的第一锚护机构,包括:设置于本体部11上且具有位于本体部11两侧和行走部10上方的部分的锚杆装置平台28;设置在锚杆装置平台28上的操作台44;设置在操作台44两侧的用于对巷顶进行锚护的一对前顶锚杆机构3、位于一对前顶锚杆机构3后部的用于对巷帮进行锚护的一对前帮锚杆机构4、位于一对前帮锚杆机构4后部的用于对巷顶及巷道同时进行锚护的一对后顶锚杆机构5;设置在后支撑部12后部的第二锚护机构,即,设置在后支撑部12后方两侧的一对后帮锚杆机构8,用于对巷帮进行锚护;设置在截割部9上方的临时支护机构2;设置在后支撑部12上的用于为第一锚护机构和第二锚护机构同时进行锚护工作提供动力的液压系统6以及控制各机构动作的电气系统7。
34.本实用新型的多臂掘锚机,截割头落地后,临时支护机构2前翻升起并展开,支撑到巷道顶板,第一锚杆机构在架体伸缩油缸和马达驱动齿轮齿条驱动下伸出至前端,一对前顶锚杆钻机锚护第一排顶锚杆,一对前帮锚杆钻机锚护滞后一排或多排的帮锚杆,一对后顶锚杆钻机锚护滞后五排或多排的顶锚杆或锚索,一对后帮锚杆钻机在最后补打最下面一根帮锚杆。而当截割头工作时,第一锚护机构可收回于本体部两侧行走部上方,不影响截割部回转,从而不影响掘锚机的截割作业,上述支护机构及锚护机构可满足掘锚机掘进、临时支护和打锚杆的需要,实现掘进和支护工作的快速切换,降低人工劳动强度,提升巷道掘进的工作效率。
35.其中,本体部11两侧和行走部10上方安装有锚杆装置平台28,在锚杆装置平台28上方安装有架体伸缩油缸27,架体伸缩油缸27活塞杆的轴向与锚杆装置平台28的长度延伸方向即掘锚机本体的长度延伸方向或掘锚机的行走方向一致,且活塞杆的伸出端与前伸架体26连接,通过架体伸缩油缸27活塞杆的伸缩运动带动前伸架体26在锚杆装置平台28上方往复移动。
36.在前伸架体26的上方安装有操作台44、操作台行走齿条25,操作台44上安装有操作台行走马达24,操作台行走马达24的输出轴上安装有与操作台行走齿条25啮合连接的齿轮,通过操作台行走马达24可带动操作台44沿着操作台行走齿条25行走,从而带动与操作
台44连接的第一锚护机构可以随着操作台44和/或前伸架体26的移动而前伸至锚杆装置平台28前端,即,本体部11前端。
37.如图4、图5所示,本实施例的前顶锚杆机构3包括前顶锚杆钻机13、左右旋转减速器14、翻转架体15、前后翻转减速器16、伸缩内筒17、臂架伸缩油缸18、臂架伸缩外筒20、臂架俯仰摆动油缸21等。其中,前顶锚杆钻机13设置在操作台44前侧,臂架俯仰摆动油缸21驱动前顶锚杆钻机13上下左右摆动,伸缩内筒17和臂架伸缩外筒20伸缩调整前顶锚杆钻机13前后距离,前后翻转减速器16驱动前顶锚杆钻机13前后翻转,左右回转减速器14驱动前顶锚杆钻机13左右旋转。
38.具体的,臂架伸缩外筒20与操作台44前侧上部铰接,且朝操作台44前方伸出。伸缩内筒17与臂架伸缩外筒20套接,且在臂架伸缩油缸18活塞杆的带动下可在臂架伸缩外筒20内前后伸缩。臂架俯仰摆动油缸21与操作台44前侧下部铰接,其活塞杆的伸出端与臂架伸缩外筒20的前端铰接,通过臂架俯仰摆动油缸21的动作可带动伸缩内筒17相对操作台44上下左右摆动。组装时,臂架伸缩外筒20与操作台44铰接的铰接轴、臂架俯仰摆动油缸21与操作台44铰接的铰接轴的轴向垂直。在伸缩内筒17前端设置有前后翻转减速器16,前后翻转减速器16的输出轴与翻转架体15固定连接,当前后翻转减速器16工作时,可驱动翻转架体15相对伸缩内筒17前后翻转。翻转架体15上安装有左右旋转减速器14,其输出轴与前顶锚杆钻机13固定连接,前顶锚杆钻机13与左右旋转减速器14前侧竖直连接,在左右旋转减速器14工作时,可驱动前顶锚杆钻机13相对翻转架体15左右旋转。
39.本实施例的前顶锚杆机构在架体伸缩油缸和马达驱动齿轮齿条驱动下伸出至掘锚机前端,前顶锚杆钻机伸缩主臂上下左右摆动调整锚杆大致位置,前后翻转、左右翻转和主臂伸缩精准调整前顶锚杆钻机到锚杆眼位,以便对第一排的巷道顶板进行锚护。
40.如图4、图5所示,本实施例的前帮锚杆机构4包括前帮锚杆钻机19、帮升降外筒22、帮升降中筒23、前帮锚杆旋转减速器37、前帮锚杆升降内筒38、前帮锚杆伸缩外筒39、前帮锚杆伸缩内筒40、前帮锚杆伸缩油缸41、前帮锚杆左右摆动缸42、前帮锚杆前后摆动缸43等。其中,前帮锚杆机构4设置在操作台44上,设置于帮升降外筒22上的前帮锚杆旋转减速器37在帮升降油缸71驱动作用下上下升降,前帮伸缩外筒39设置在前帮锚杆旋转减速器37上,通过前帮锚杆伸缩油缸41驱动前帮锚杆伸缩内筒40前后伸缩,前帮锚杆伸缩内筒40前端设置有前帮锚杆左右摆动缸42和前帮锚杆前后摆动缸43,驱动前帮锚杆钻机19前后左右旋转摆动。
41.具体的,帮升降外筒22的底部固定安装在操作台44内,帮升降中筒23下部与帮升降外筒22套接,前帮锚杆升降内筒38的下部与帮升降中筒23套接,前帮锚杆升降内筒38的上端与前帮锚杆旋转减速器37固定连接,在帮升降油缸71的驱动作用下,帮升降中筒23、前帮锚杆升降内筒38可同时或分别相对帮升降外筒22沿竖直方向上下升降移动,从而带动前帮锚杆旋转减速器37上下升降移动。前帮伸缩外筒39安装在前帮锚杆旋转减速器37的输出轴上,可随前帮锚杆旋转减速器37的旋转而旋转。前帮锚杆伸缩内筒40与前帮伸缩外筒39套接,并在前帮锚杆伸缩油缸41的驱动下相对前帮伸缩外筒39沿水平方向前后伸缩。在前帮锚杆伸缩内筒40的前端固定安装有前帮锚杆左右摆动缸42,其活塞杆的延伸方向与前帮锚杆伸缩内筒40的轴向垂直。在前帮锚杆左右摆动缸42的活塞杆伸出端上固定安装有前帮锚杆前后摆动缸43,其活塞杆的延伸方向与前帮锚杆伸缩内筒40的轴向平行,而前帮锚杆
钻机19安装在活塞杆伸出端上。随着前帮锚杆左右摆动缸42的工作,前帮锚杆前后摆动缸43沿水平方向的左右方向伸缩移动,当前帮锚杆前后摆动缸43工作时,前帮锚杆钻机19可沿水平方向的前后方向伸缩移动。因此,当前帮锚杆旋转减速器37、前帮锚杆左右摆动缸42和前帮锚杆前后摆动缸43同时工作时,前帮锚杆钻机19可相对操作台前后左右旋转摆动。
42.本实施例的前帮锚杆钻机通过升降伸缩筒上下升降,回转减速器左右摆动调整锚杆距帮距离,伸缩筒前后伸缩和伸缩筒前端的两个液压螺旋摆动缸360旋转调整距离帮锚杆的眼位,以随着前顶锚杆钻机对巷顶进行锚护的同时,对滞后一排或多排的巷帮进行锚护。
43.如图4、图5所示,本实施例后顶锚杆机构5包括后顶锚杆升降油缸29、后顶锚杆升降外筒30、后顶锚杆升降内筒31、后顶锚杆钻机32、后顶锚杆左右旋转减速器33、后顶锚杆左右摆动缸34、前后摆动架体35、前后摆动油缸36等。其中,后顶锚杆机构5通过前后摆动架体35铰接安装在操作台44后侧,并通过设置在操作台44上方的前后摆动油缸36驱动下前后摆动,后顶锚杆左右旋转减速器33设置在前后摆动架体35上,驱动后顶锚杆升降外筒30和后顶锚杆升降内筒31左右旋转,设置在后顶锚杆升降外筒30下端的后顶锚杆升降油缸29驱动后顶锚杆升降内筒31上下升降,设置于后顶锚杆升降内筒31上端的后顶锚杆左右摆动缸34驱动后顶锚杆钻机32左右旋转。
44.具体的,如图4、图5所示,前后摆动架体35铰接在操作台44后侧,前后摆动油缸36铰接安装在操作台44后侧且其活塞杆伸出端与前后摆动架体35上部连接,通过前后摆动油缸36驱动前后摆动架体35相对操作台44前后摆动。后顶锚杆左右旋转减速器33设置在前后摆动架体35上,其输出轴与后顶锚杆升降外筒30固定连接,工作时可驱动后顶锚杆升降外筒30左右旋转。后顶锚杆升降外筒30沿竖直方向安置,并与后顶锚杆升降内筒31套接,在后顶锚杆升降外筒30下端设置有后顶锚杆升降油缸29,用于驱动后顶锚杆升降内筒31相对后顶锚杆升降外筒30上下升降。在后顶锚杆升降内筒31上端安装有后顶锚杆左右摆动缸34,其活塞杆与后顶锚杆钻机32固定连接,驱动后顶锚杆钻机32左右旋转。
45.本实施例的后顶锚杆钻机32,随着前顶锚杆钻机对巷顶进行锚护、前帮锚杆钻机对巷帮进行锚护的同时,可对滞后多排的巷顶和巷帮进行锚护。
46.其中,如图6所示,为本实施例第二锚护机构的结构示意图,为通过后支撑部12安装在本体部11后部的后帮锚护机构,包括后帮锚杆伸缩油缸45、后帮锚杆伸缩内筒46、后帮锚杆伸缩外筒47、上下摆动油缸48、后帮锚杆左右旋转减速器49、后帮锚杆钻机50。其中,后帮锚杆钻机伸缩外筒47铰接在后支撑部12下端,设置在后帮锚杆伸缩外筒47上的后帮锚杆伸缩油缸45驱动后帮锚杆伸缩内筒46前后伸缩,铰接安装在后支撑部12上端的上下摆动油缸48驱动后帮锚杆伸缩外筒和后帮锚杆伸缩内筒46上下摆动,设置在后帮锚杆伸缩内筒46前端的后帮锚杆左右旋转减速器49驱动后帮锚杆钻机50左右旋转。
47.具体的,后支撑部12固定安装在本体部11后部,上下摆动油缸48分别与后支撑部(12)和后帮锚杆伸缩外筒(47)铰接连接,即,后帮锚杆伸缩外筒47与后支撑部12下方耳座铰接,后帮锚杆伸缩内筒46与后帮锚杆伸缩外筒47套接并在后帮锚杆伸缩油缸45的驱动下相对后帮锚杆伸缩外筒47伸缩运动。后帮锚杆伸缩外筒47通过上下摆动油缸48与后支撑部12铰接,并在上下摆动油缸48驱动下上下摆动,从而带动后帮锚杆钻机50上下摆动。后帮锚杆伸缩外筒47上安装有后帮锚杆左右旋转减速器49,后帮锚杆钻机50固定安装在后帮锚杆
左右旋转减速器49的输出轴上,通过左右旋转减速器49驱动后帮锚杆钻机50左右旋转。
48.本实施例的后帮锚护机构的伸缩筒铰接安装在后支撑部下方耳座上,可在上下摆动油缸驱动下上下摆动,伸缩筒可驱动后帮锚杆钻机前后伸缩,设置在伸缩筒前端的回转减速器可驱动锚杆钻机左右旋转,以便本实施例的后帮锚护机构可随着前顶锚杆钻机对巷顶进行锚护、前帮锚杆钻机对巷帮进行锚护、后顶锚护机构对巷顶和巷帮进行锚护的同时,对滞后多排的巷帮进行锚护。设计时,后帮锚杆钻机在上下摆动油缸的驱动下上下可摆动15度,以调整后帮锚杆钻机的高度,而伸缩筒有400mm伸缩行程,且伸缩内筒前端安装有旋转减速器,使得后帮锚杆钻机可180度旋转,这样,既可直立锚护顶部锚杆,也可水平锚护帮部锚杆。
49.其中,本实施例的临时支护机构2固定于截割部9上端,对巷道顶板进行临时支护,临时支护机构2还起到将锚网和钢带支撑到巷道顶板上的作用。如图7、图8所示,临时支护机构2包括支护内筒51、支护中筒52、支护外筒53、支护升降油缸54、支护铰接架55、支护俯仰油缸56、支护侧伸架体57、支护主架体58、支护翻转摆动缸59、支护铰接架体60、支护左右平衡调节弹簧61、支护外伸油缸62等。其中,支护主架体58左右两侧均设置有支护侧伸架体57,支护伸缩筒(包括支护内筒51、支护中筒52、支护外筒53)铰接安装在截割部9前端,支护伸缩筒上方设置有支护铰接架体60,支护主架体58可通过支护铰接架体60左右旋转并通过支护左右平衡调节弹簧61自动找平,支护铰接架体60上方设置有支护翻转摆动缸59。掘锚机工作完成后,截割头落地,支护伸缩筒在支护俯仰油缸驱动下翻转向前,支护升降油缸驱动支护伸缩筒伸缩移动并带动支护顶板(包括支护主架体和支护侧伸架体)向上移动,支护翻转摆动缸59驱动支护主架体前后旋转至与巷道顶板平行状态,支护升降油缸54驱动支护伸缩筒以带动支护顶板至巷道顶板。
50.具体的,支护铰接架55下部固定安装在截割部9前端的上部,支护外筒53的下部与支护铰接架55铰接,支护中筒52套装在支护外筒53内,支护内筒51套装在支护中筒52内,支护外筒53内部底端还设置有支护升降油缸54,通过支护升降油缸54驱动支护内筒51、支护中筒52相对支护外筒53伸缩运动。支护俯仰油缸56与支护外筒53和截割部9后部铰接,可驱动支护外筒53相对截割部9俯仰运动。在支护内筒51上方固定安装有支护铰接架体60,支护铰接架体60上安装有支护翻转摆动缸59,支护主架体58底部安装在支护翻转摆动缸59的活塞杆上,当支护翻转摆动缸59工作时,可带动支护主架体58相对支护铰接架体60翻转。并且,支护铰接架体60上设置支护左右平衡调节弹簧61,可通过支护左右平衡调节弹簧61自动找平。支护主架体58左右两侧均设置有支护侧伸架体57,支护侧伸架体57在对应支护外伸油缸62的驱动下相对支护主架体58伸缩。
51.其中,本实施例机载锚杆钻机采用相同的结构,并通过锚杆钻机座66对应的减速器或油缸连接。下面,结合图9、图10,对各机载锚杆钻机的结构进行详细描述。
52.如图9、图10所示,锚杆钻机包括滑动架63、马达64、动力头65、锚杆钻机座66、链条机构67、链条油缸68、滑架油缸69、夹持器70等。机载锚杆钻机的锚杆钻机座上移动设置有滑动架,锚杆钻机座上的滑架油缸驱动滑动架在锚杆钻机座上下移动,滑动架上设置有动力头、链条机构,滑动架设置有驱动链条机构带动动力头在滑动架上移动的链条油缸。
53.具体的,在锚杆钻机座66上设置滑动架63,在滑动架63上设置动力头65,在动力头65上设置马达64,在滑动架63设置上链条机构67,与动力头65连接.在锚杆钻机座66上设置
滑架油缸68,与滑动架63连接,用以驱动滑动架63在锚杆钻机座66上移动。在滑动架63上设置链条油缸68,用以驱动链条机构67带动动力头65在滑动架63上移动。滑动架63顶端还设置有夹持器70,该夹持器70可采用现有技术结构,用以对钻杆进行扶持作用,保障钻眼作业稳定性。
54.本实用新型实施例的多臂掘锚机,操作台安装到掘锚机本体的正上方,并将液压系统的泵站与操作台进行了一体化设计,减小了泵站长度,并可采用160千瓦油泵电机带动双联260排量的变量柱塞泵,充分满足8台锚杆钻机(即各两台的前顶、前帮、后顶、后帮锚杆钻机)同时工作。此外,操作台可以通过智能遥控或先导双向控制操作,即,既可远程遥控器遥控操作台相对本体部移动,也可以通过操作台上的先导阀控制操作台相对本体部移动,两者之间相互闭锁,从而避免误操作伤人。而本体部两侧、行走部上方安装前三排锚杆机构(即前顶、前帮、后顶、后帮锚杆机构),第四排锚杆机构(即后帮锚杆机构)安装在后支撑部后部两侧,多个锚杆机构的锚杆钻机可同时工作进行锚杆锚装,第一排锚杆钻机(即一对前顶锚杆钻机)完成第一排顶锚杆的锚护工作,第二排锚杆钻机(即一对前帮锚杆钻机)完成滞后1排或多排上端两根帮锚杆锚护工作,第三排锚杆钻机(即一对后顶锚杆钻机)完成滞后5排或多排上端第三根帮锚杆的锚护工作,第四排锚杆钻机完成滞后最少10排最下面一根帮锚杆的锚护工作,整机在掘进巷道施工时实现掘进、锚护连续作业,无需掘锚机后退,掘进后掘锚机不动便可通过锚护部各动作实现巷道顶锚杆、角锚杆、帮锚杆各锚护角度锚杆的锚固,完全能够满足掘进、临时支护和打锚杆的功能需要,真正实现了掘进和支护工作的快速切换,大大的降低了人工的劳动强度,提升工作效率。
55.综上所述,本实用新型多臂掘锚机具有如下优点:
56.本实用新型的多臂掘锚机,当截割部工作时,锚护机构可收回于本体部两侧、行走部上方,不影响截割部回转,从而不影响掘锚机的截割作业,而当截割部不工作时,锚护机构可快速展开并对巷顶和巷帮同时进行锚护,因此可满足掘锚机掘进、临时支护和打锚杆的需要,实现掘进和支护工作的快速切换,降低人工劳动强度,提升巷道掘进的工作效率。
57.尽管上文对本实用新型作了详细说明,但本实用新型不限于此,本技术领域的技术人员可以根据本实用新型的原理进行修改,因此,凡按照本实用新型的原理进行的各种修改都应当理解为落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
