1.本发明涉及无线通讯技术领域,尤其涉及危化品区域设备管理技术领域,具体是指一种化工行业中实现智能巡检的机器人系统及其控制方法。
背景技术:
2.目前针对化工区域场景下的异常情况检测技术适用条件有限,需要大量的样本数据做前期训练,无法准确实现对气体泄漏、管内结晶的等异常情况判断,且无实际应用示范。
3.为有效解决危化品区域管理人员缺乏问题,实现指挥中心对化工设备的日常管理、异常情况的预警及应急指挥。设计一种智能巡检机器人系统架构,在巡检机器人载体基础上,通过搭载摄像头、氢气和氯气传感器,实现厂房的自动巡检,并进行现场视频回传、现场反应设备的泄漏情况的分析和回传,现场氢气和氯气浓度的感知和数据回传;在监控中心,可通过本地软件系统,对厂房设备状况、环境状况和安全状况进行实时监管,并可调阅的历史数据、形成报表。
技术实现要素:
4.本发明的目的是克服了上述现有技术的缺点,提供了一种满足结构简单、快捷方便、性能稳定的化工行业中实现智能巡检的机器人系统及其控制方法。
5.为了实现上述目的,本发明的化工行业中实现智能巡检的机器人系统及其控制方法如下:
6.该化工行业中实现智能巡检的机器人系统,其主要特点是,所述的系统包括:
7.感知层,用于感知区域内视频图像数据、物体表面温度、位置和实时环境参数的信息;
8.网络层,与所述的感知层相连接,用于接收感知层的数据信息,并进行信息数据接入及传输控制;
9.分析层,与所述的网络层相连接,用于接收所述的网络层传输的数据信息,进行移动终端的智能巡检;
10.后台,与所述的网络层相连接,用于接收所述的网络层传输的数据信息,进行数据存储处理,进行移动终端的预警。
11.较佳地,所述的感知层包括:
12.位置信息感知模块,与所述的网络层相连接,用于感知移动终端的位置信息;
13.视频感知模块,与所述的网络层相连接,用于感知移动终端所处位置周围的图像信息;
14.红外光感模块,与所述的网络层相连接,用于感知移动终端所处位置周围物体的温度信息;
15.环境感知模块,与所述的网络层相连接,用于感知移动终端所处位置的环境参数。
16.较佳地,所述的网络层包括网络接入设备,与所述的采集层和应用层相连接,用于实现设备的局域网和公网接入,并实现前端设备和后台的数据传输。
17.较佳地,所述的分析层包括:
18.路径设计模块,与所述的网络层相连接,用于结合感知层采集的位置信息,实现巡检路径最优规划,并设置最优路线与相应的任务点;
19.图像分析模块,与所述的网络层相连接,用于根据感知层采集的视频数据,对比检测巡检区域的异常情况。
20.较佳地,所述的后台包括:
21.数据应用服务器,与所述的网络层相连接,通过所述的网络接入设备接入局域网和公网,用于进行应用服务支撑和数据存储处理;
22.预警管理模块,与所述的网络层相连接,用于对异常行为进行预警管理控制。
23.较佳地,所述的图像分析模块在化工场景下,识别管道内化学品、气体渗漏的异常情况。
24.该利用上述系统实现智能巡检控制的方法,其主要特点是,所述的方法包括智能检测的步骤,具体包括以下处理过程:
25.(1-1)获取渗漏设备的样本数据,并进行训练;
26.(1-2)根据像素帧差法,对比分析固定间隔时间段中现场设备内化学制品的变化;
27.(1-3)根据化学制品的变化检测气体泄漏、管内结晶的异常情况;
28.(1-4)对异常行为进行预警管理控制,产生报警信息。
29.较佳地,所述的方法还包括任务点设定的步骤,具体包括以下处理过程:
30.(2-1)设置巡检路线;
31.(2-2)根据前端设备的焦距、摄像范围、摄像角度的参数,设定任务点;
32.(2-3)在行进过程中根据设定的分段采样路线,每行驶预设的距离驻留预设的时间;
33.(2-4)采集路段周围的环境气体数据。
34.较佳地,所述的步骤(2-3)的预设的距离为3~5米,预设的时间为10~20秒。
35.采用了本发明的化工行业中实现智能巡检的机器人系统及其控制方法,在防爆巡检机器人载体基础上,通过搭载摄像头、氢气和氯气传感器,实现厂房的自动巡检,并进行现场视频回传、现场反应设备的泄漏情况的分析和回传,现场氢气和氯气浓度的感知和数据回传。开发监管后台软件,针对化工场景下,管道内化学品缓慢变化设计的渗漏分析方法,实现对化工场景下气体检测、渗漏等突发事件的预警及应急指挥,结构简单实用、处理过程快捷方便、工作性能稳定可靠、适用范围较为广泛,在危化品区域安全风险检测预警与控制方面有着深远的意义。
附图说明
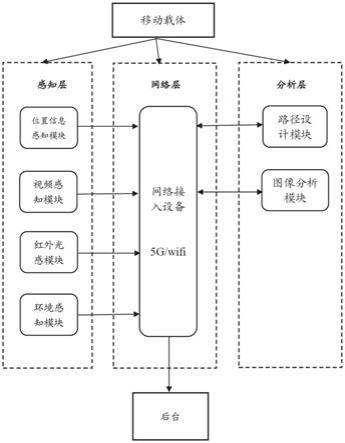
36.图1为本发明的化工行业中实现智能巡检的机器人系统的结构示意图。
37.图2为本发明的实现智能巡检控制的方法的巡检工作模式流程图。
38.图3为本发明的实现智能巡检控制的方法的任务点设定示意图。
具体实施方式
39.为了能够更清楚地描述本发明的技术内容,下面结合具体实施例来进行进一步的描述。
40.本发明的该化工行业中实现智能巡检的机器人系统,其中包括:
41.感知层,用于感知区域内视频图像数据、物体表面温度、位置和实时环境参数的信息;
42.网络层,与所述的感知层相连接,用于接收感知层的数据信息,并进行信息数据接入及传输控制;
43.分析层,与所述的网络层相连接,用于接收所述的网络层传输的数据信息,进行移动终端的智能巡检;
44.后台,与所述的网络层相连接,用于接收所述的网络层传输的数据信息,进行数据存储处理,进行移动终端的预警。
45.作为本发明的优选实施方式,所述的感知层包括:
46.位置信息感知模块,与所述的网络层相连接,用于感知移动终端的位置信息;
47.视频感知模块,与所述的网络层相连接,用于感知移动终端所处位置周围的图像信息;
48.红外光感模块,与所述的网络层相连接,用于感知移动终端所处位置周围物体的温度信息;
49.环境感知模块,与所述的网络层相连接,用于感知移动终端所处位置的环境参数。
50.作为本发明的优选实施方式,所述的网络层包括网络接入设备,与所述的采集层和应用层相连接,用于实现设备的局域网和公网接入,并实现前端设备和后台的数据传输。
51.作为本发明的优选实施方式,所述的分析层包括:
52.路径设计模块,与所述的网络层相连接,用于结合感知层采集的位置信息,实现巡检路径最优规划,并设置最优路线与相应的任务点;
53.图像分析模块,与所述的网络层相连接,用于根据感知层采集的视频数据,对比检测巡检区域的异常情况。
54.作为本发明的优选实施方式,所述的后台包括:
55.数据应用服务器,与所述的网络层相连接,通过所述的网络接入设备接入局域网和公网,用于进行应用服务支撑和数据存储处理;
56.预警管理模块,与所述的网络层相连接,用于对异常行为进行预警管理控制。
57.作为本发明的优选实施方式,所述的图像分析模块在化工场景下,识别管道内化学品、气体渗漏的异常情况。
58.本发明的该利用上述系统实现智能巡检控制的方法,其中所述的方法包括智能检测的步骤,具体包括以下处理过程:
59.(1-1)获取渗漏设备的样本数据,并进行训练;
60.(1-2)根据像素帧差法,对比分析固定间隔时间段中现场设备内化学制品的变化;
61.(1-3)根据化学制品的变化检测气体泄漏、管内结晶的异常情况;
62.(1-4)对异常行为进行预警管理控制,产生报警信息;
63.所述的方法还包括任务点设定的步骤,具体包括以下处理过程:
64.(2-1)设置巡检路线;
65.(2-2)根据前端设备的焦距、摄像范围、摄像角度的参数,设定任务点;
66.(2-3)在行进过程中根据设定的分段采样路线,每行驶预设的距离驻留预设的时间;
67.(2-4)采集路段周围的环境气体数据。
68.作为本发明的优选实施方式,所述的步骤(2-3)的预设的距离为3~5米,所述的预设的时间为10~20秒。
69.本发明的具体实施方式中,智能移动终端系统的工作场景用于化工车间的无人化、智能化巡检,检测化工气体泄漏的异常情况。
70.智能移动终端系统的工作模式,根据化工车间的实际通道间距离、设备尺寸及摄像头覆盖范围设置任务点采样的工作模式。
71.智能移动终端系统的采样模式,从时间维度,通过视频感知设备采集指定任务点范围内设备的图像数据,每隔一段时间通过图像比对算法检测气体渗漏、管道生锈、结晶等异常情况。从空间维度,通过气体传感器采集指定任务点范围内设备周围有毒有害气体的浓度;通过红外感知设备检测任务点范围内设备表面温度。
72.本发明涉及一种智能移动终端系统构架,系统构架包括感知层,由视频感知模块、红外光感模块、环境感知模块、位置感知模块组成,通过感知设备采集感知区域的视频图像数据、物体表面温度、位置、实时环境参数等信息;网络层,通过5g/wifi通讯模块将所采集的位置、温度、环境信息传输至分析层对数据进行下一步处理,同时上传至后台存储;分析层,由图像分析模块、路径规划模块、避障模块组成,实现移动终端的智能巡检功能。本发明在化工车间场景下,设计一种任务点采样的巡检工作模式,从时间、空间两个纬度,实现对车间内气体检测、渗漏等突发事件的监测与预警,并上传至中控平台应急指挥。
73.本发明中的智能移动终端系统的具体实施例中,在防爆巡检机器人载体基础上,通过搭载摄像头、位置传感器、红外传感器、氢气传感器,实现厂房的自动巡检,并进行现场视频回传、现场反应设备的泄漏情况的分析和回传,现场氢气浓度的感知和数据回传。系统架构如图1所示,具体描述如下:
74.感知层,用于感知区域内位置信息感知、图像信息感知、温度信息感知、气体信息感知。
75.感知层主要包括位置信息感知模块、红外感知模块、气体传感器、视频感知模块。位置信息感知模块采用16线激光雷达、编码器、imu、gnss-rtk/uwb高精度定位等多种传感器融合定位。红外感知模块,通过高性能红外组件任务设备感知氢气等易燃气体。高性能红外组件任务设备主要包括红外热成像仪和红外分析算法。红外热成像仪的红外探测器接收物体辐射热量,把它转换成电信号,经过后续放大、滤波、模数转换,cpu处理后在图显示器上显示。红外热成像仪具备自动对焦功能,分辨率≥(640
×
480),可在实时影像中叠加显示温度最高点位置及温度,红外热成像仪热灵敏度优于50mk,测温精度优于2k,温度显示以摄氏度为单位。其性能指标满足视觉识别系统硬件的要求。气体传感器,主要实现氯气检测,并通过接口实时传输到机器人载体,统一由机器人载体回传至后台软件。气体传感器的接口要求:rs485。视频感知模块,由光学采集云台组件组成。采用不锈钢材质,满足防爆及抗腐蚀应用需求。设备采用无挡片成像的热像仪和36倍可见光,可见光支持电子透雾功能。接
入双光处理模块,输出1路视频,可实现画中画及单画画显示,通过网络输出图像,通过网络或者485控制。
76.分析层主要包括路径分析模块和图像分析模块。路径分析模块,接收位置信息感知模块感知的位置信息,基于前端设备的焦距、摄像范围、摄像角度等参数,设定任务点,根据设定的分段采样路线,采集该路段周围的环境气体数据。图像分析模块,接收视频感知模块的图像信息,基于像素帧差法,对比分析固定间隔时间段中,现场设备内化学制品的变化。
77.网络层,用于接收所述的采集层所得到的数据信息,并进行信息数据接入、传输控制;
78.网络层,完成信息数据处理、接入、传输,主要包括网络设备、局域网等硬件设备。面向采集和后台,网络层主要实现设备的局域网接入、应用服务支撑、信息传输等功能。
79.网络层主要包括网络设备、局域网等硬件设备。经由路由器等网络设备和局域网,把数据信息上传到数据、应用服务器。
80.后台,用于接收所述的网络层传输的数据信息,进行数据存储和预警管理。
81.其中,感知层包括:
82.信息感知模块,用于感知移动终端的位置信息;
83.红外感知模块,用于感知移动终端所处位置周围物体的温度信息;
84.气体传感器,用于感知移动终端所处位置的环境参数;
85.视频感知模块,用于感知移动终端所处位置周围的图像信息。
86.其中,分析层包括:
87.路径分析模块,用于实现巡检路径最优规划,并设置任务点。
88.图像分析模块,用于化工车间内,管道内化学品、气体渗漏等异常情况的识别
89.其中,网络层包括:
90.网络接入设备,用于实现设备的局域网和公网接入,实现前端设备和后台的数据传输;
91.其中,后台包括:
92.数据应用服务器,通过所述的网络接入设备接入局域网和公网,用于应用服务支撑、数据存储处理;
93.预警管理模块,用于异常行为的预警管理控制。
94.本发明的智能移动终端系统构架,系统构架包括感知层,由视频感知模块、红外光感模块、环境感知模块、位置感知模块组成,通过感知设备采集感知区域的视频图像数据、物体表面温度、位置、实时环境参数等信息;网络层,通过5g/wifi通讯模块将所采集的位置、温度、环境信息传输至分析层对数据进行下一步处理,同时上传至后台存储;分析层,由图像分析模块、路径规划模块、避障模块组成,实现移动终端的智能巡检功能。
95.该系统可实现化工车间气体泄漏的异常检测,其流程如图2所示。该系统可实现路径最优规划与任务点设定,如图3所示。
96.采用了本发明的化工行业中实现智能巡检的机器人系统及其控制方法,在防爆巡检机器人载体基础上,通过搭载摄像头、氢气和氯气传感器,实现厂房的自动巡检,并进行现场视频回传、现场反应设备的泄漏情况的分析和回传,现场氢气和氯气浓度的感知和数
据回传。开发监管后台软件,针对化工场景下,管道内化学品缓慢变化设计的渗漏分析方法,实现对化工场景下气体检测、渗漏等突发事件的预警及应急指挥,结构简单实用、处理过程快捷方便、工作性能稳定可靠、适用范围较为广泛,在危化品区域安全风险检测预警与控制方面有着深远的意义。
97.在此说明书中,本发明已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本发明的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。