1.本发明涉及可见光通信技术领域,特别是涉及一种基于可见光通信的同时定位与校正方法。
背景技术:
2.随着近年来led照明的普及,可见光定位(vlp)成为一种非常有前途的技术。由于可以与原先照明设施复用,可见光定位同时具有精度高和成本低的优点,并对于射频信号表示出良好的抗干扰性。同时,由于cmos图像传感器近年来在各类电子设备中大量应用,尤其是在智能手机上,使其可以应用于可见光定位中的接收端。利用cmos传感器的滚动快门效应,可以得到包含不同粗细条纹信息的图像,进一步解码得到位置信息,结合图像的几何特征,则可实现定位的功能。
3.目前提出的可见光定位技术方法普遍存在定位精度不足和定位范围过小的问题,且在实际应用中需要使用较多的定位灯或标记物的辅助,或依赖于接收端其它的传感器,这些问题都给可见光定位技术的实际应用带来了困难。同时,为了得到清晰的图片,使用变焦镜头往往无法事先得到确定的焦距,这使得依赖焦距的定位算法难以得到实际应用。
4.因此,一种仅通过两盏共面圆灯实现的高精度倾斜定位并同时估算出镜头焦距的方法具有重要的实际意义。
技术实现要素:
5.本发明提供一种基于可见光通信的同时定位与校正方法,以解决现有可见光定位方法的精度不足和范围过小以及焦距估算的问题,且定位过程中无需人机交互。
6.为实现上述目的,本发明提供了如下方案:
7.一种基于可见光通信的同时定位与校正方法,包括:
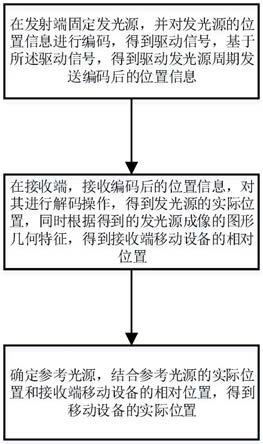
8.在发射端固定发光源,并对所述发光源的位置信息进行编码,得到驱动信号,基于所述驱动信号,得到驱动发光源周期发送编码后的位置信息;
9.在接收端,接收所述编码后的位置信息,对其进行解码操作,得到所述发光源的实际位置,同时根据得到的所述发光源成像的图形几何特征,得到接收端移动设备的相对位置;
10.确定参考光源,结合参考光源的实际位置和所述接收端移动设备的相对位置,得到所述移动设备的实际位置。
11.优选的,所述发光源为任意半径且共面的两个圆形灯,所述两个圆形灯之间没有重叠。
12.优选的,所述圆形灯的状态由可编程逻辑器件进行控制,用于对所述圆形灯的位置信息进行编码操作,得到所述编码后的位置信息,并发送至所述接收端。
13.优选的,所述接收端包括移动设备,通过所述移动设备对所述两个圆形灯以任意角度进行拍摄,得到具有两个圆灯的图像,其中,所述图像中的每个圆形灯被遮挡的面积不
超过圆形灯面积的一半。
14.优选的,在实际定位应用之前,进行传感器的校正,所述移动设备的拍摄平面与所述圆形灯的平面保持平行,测量出此时所述移动设备的镜头光心到灯平面的距离h。
15.优选的,基于所述镜头光心到灯平面的距离h,并通过相似性质计算出焦距的值f0。
16.优选的,对所述图像进行处理,检测出所述圆形灯在所述图像上形成的椭圆图像的边界,得到椭圆轮廓,通过所述椭圆的轮廓,利用最小二乘法拟合点集得到两个椭圆的方程。
17.优选的,基于所述椭圆轮廓提取出椭圆图像作为感兴趣区域,检测所述感兴趣区域中的明暗条纹并进行解码,得到所述两个圆形灯的实际位置。
18.优选的,通过所述两个椭圆的方程,以及所述移动设备的拍摄平面与所述圆形灯的平面的旋转关系,分别得到两个圆形灯所在平面的法向量n;其中,得到所述旋转关系的过程包括:以其中任意一盏灯作为参考灯,其圆心为原点建立世界坐标系,x轴为两圆心连线的方向,利用法向量n得到在相机坐标下的世界坐标系的各个基向量,确定旋转矩阵,得到所述旋转关系。
19.优选的,基于所述参考灯的坐标和所述旋转矩阵求解出平移向量,得到在所述世界坐标系下所述移动设备的坐标,结合所述参考灯的实际坐标得到所述移动设备的实际坐标和姿态,完成定位。
20.本发明的有益效果为:
21.本发明与现存的定位方法相比,只需一次拍摄即可同时得到焦距和相机位姿,完成定位,且不依赖其他额外的传感器或标记物,定位过程无需进行交互。与此同时,在难以事先预估得到焦距的大致值时,仍可得到估算的焦距和相机的位姿,且能有较好的精度。因此,本发明适用于多种用途和实际情况下的定位系统,具有广阔的应用前景。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
23.图1为本发明实施例方法流程图;
24.图2为本发明实施例中平行状态下相似性质示意图;
25.图3为本发明实施例中两个共面圆灯在传感器上成像示意图;
26.其中,d为两个圆心之间的距离,h为光心到灯的距离,d为图像上两个圆心之间的距离,f为焦距,c1,c2分别为两个圆形灯,oxyz为灯坐标系,oxcyczc为相机坐标系。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
28.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
29.本发明提供一种基于可见光通信的同时定位与校正方法,具体包括(如附图1所示):
30.在发射端固定发光源,并对所述发光源的位置信息进行编码,得到驱动信号,基于所述驱动信号,得到驱动发光源周期发送编码后的位置信息;
31.在接收端,接收所述编码后的位置信息,对其进行解码操作,得到所述发光源的实际位置,同时根据得到的所述发光源成像的图形几何特征,得到接收端移动设备的相对位置;
32.确定参考光源,结合参考光源的实际位置和所述接收端移动设备的相对位置,得到所述移动设备的实际位置。
33.首先,定位装置的制作。在一个平面上(如天花板)共面地安装两盏圆形的灯,灯具半径的大小任意,要注意两灯不要有重叠的部分。在本实施例中,两灯的开关状态由单片机进行控制,单片机对各灯的实际位置信息进行编码后,加上固定的首部通过各灯持续发送。单片机对测量得到的各灯的实际位置信息进行编码,然后采用二进制启闭键控对灯进行调制,使其能够发送信息。
34.其次,估算焦距。如附图2所示,放置摄像机到大致定位高度上,使摄像机与灯平面平行,测量出此时镜头光心到灯平面的距离h,利用相似性质求出此时焦距的大致值f0。
35.用手机或其他摄像机(任意姿态)拍摄定位灯,得到一幅具有两个椭圆灯像的图像,图像中每个灯都不应有超过一半的面积被遮挡。通过镜头调整对焦使成像清晰。在本实施例中使用的相机内参除焦距外已经经过标定,因此可以忽略畸变。
36.图像处理,找出椭圆。对得到的图像进行灰度化、二值化、闭操作处理,消除条纹信息的影响,用canny算子找出边缘,然后用最小二乘法拟合椭圆轮廓点集,得到椭圆方程。
37.位置信息的解码。将得到的椭圆轮廓作为roi感兴趣区域从图中提取出来,检测其中的明暗条纹并进行解码,得到各灯的实际位置信息。
38.由于接收端相机的cmos传感器具有滚动快门效应(逐行曝光),使得灯的明暗变化能够以黑白条纹的形式被记录下来,在图像上就得到了明暗条纹。通过对该条纹进行合适地采样,然后采用合适的灰度阈值将明暗条纹解码成01信号,就得到实际位置信息。
39.求解法向量。如附图3所示,对于在以光心为原点的灯坐标系(oxyz)中圆灯边界与过原点的线形成的斜圆锥,在本实施例中表示为:
[0040][0041]
其中,(x0,y0,z0)为圆心,
[0042]
p=[x y z0]
t
,
[0043][0044]
对于在相机图像上的椭圆像与过原点的线形成的在相机坐标系(oxcyczc)下的斜椭圆锥可表示为:
[0045]
p
t
qp=0
[0046]
其中p=[x
i y
i-f]
t
,两坐标系的原点相同。
[0047]
因此,有矩阵r满足p=rpc时,则两坐标系下有kr
t
qr=qc,且k≠0,将q对角化得到q=vλv
t
,其中λ=diag{λ1,λ2,λ3},则有kr
vt
λrv=qc,rv=v
t
r,由此代入qc就可以解出在相机坐标系下灯平面的其中一个法向量(即灯坐标系z轴方向),同理可得出另一个法向量。
[0048]
求解优化问题,得出焦距。迭代求解优化问题ming=(n1·n2-1)2得出相机的焦距fj,j=1,2,3
…
,,判断该焦距是否落在由阈值t给出的范围[f
i-t,fi t]内,阈值t按fi的一定比例给出,i=0,1,2
…
。若fj落在区间内,则对图3中得到的焦距fj进行校正,校正后的焦距为:
[0049]fi 1
=(1-α)fi 0fj[0050]
其中,α是焦距的更新率,且0《α《1;否则,取α=0。
[0051]
求解各圆心。
[0052]
得到校正焦距后代入到q,计算出坐标r为对应灯的半径,则圆心为:
[0053][0054]
同理,可求得另一个圆心。
[0055]
建立世界坐标系,确定旋转矩阵。选其中一盏灯c1作为参考灯,令其圆心为原点o,两圆心连线的方向为x轴,c1,c2为圆心,取灯平面的单位法向量n=k,则有j=k
×
i,因此i,j,k就可以确定世界坐标系的x,y,z三个方向。由于相机坐标系的基同为正交单位基,所以旋转矩阵r
′
=[i j k]
t
。
[0056]
最后,确定平移向量,完成摄像机定位。参考灯在相机坐标系下的坐标经过旋转矩
阵r
′
线性变换以后的结果就是摄像机相对参考灯的平移向量t=-r
′
g1,摄像机的姿态(三轴欧拉角α,β,γ)能够从旋转矩阵中得到:
[0057]
利用平移向量求解出在世界坐标系下相机的坐标,结合参考灯的实际坐标和旋转矩阵得到待定位设备的实际坐标和姿态,完成定位。
[0058]
与现有技术方法相比,本发明只需一次拍摄即可同时得到焦距和相机位姿,完成定位,且不依赖其他额外的传感器或标记物,定位过程无需进行交互。与此同时,在难以事先预估得到焦距的大致值时,仍可得到估算的焦距和相机的位姿,且能有较好的精度。因此,本发明适用于多种用途和实际情况下的定位系统,具有广阔的应用前景。
[0059]
以上所述的实施例仅是对本发明优选方式进行的描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。