技术特征:
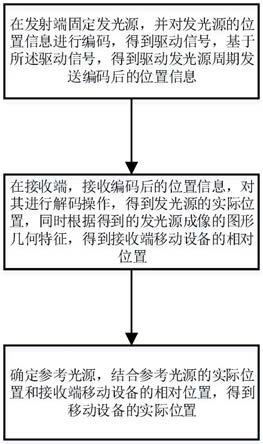
1.一种基于可见光通信的同时定位与校正方法,其特征在于,包括:在发射端固定发光源,并对所述发光源的位置信息进行编码,得到驱动信号,基于所述驱动信号,得到驱动发光源周期发送编码后的位置信息;在接收端,接收所述编码后的位置信息,对其进行解码操作,得到所述发光源的实际位置,同时根据得到的所述发光源成像的图形几何特征,得到接收端移动设备的相对位置;确定参考光源,结合参考光源的实际位置和所述接收端移动设备的相对位置,得到所述移动设备的实际位置。2.根据权利要求1所述的基于可见光通信的同时定位与校正方法,其特征在于,所述发光源为任意半径且共面的两个圆形灯,所述两个圆形灯之间没有重叠。3.根据权利要求2所述的基于可见光通信的同时定位与校正方法,其特征在于,所述圆形灯的状态由可编程逻辑器件进行控制,用于对所述圆形灯的位置信息进行编码操作,得到所述编码后的位置信息,并发送至所述接收端。4.根据权利要求3所述的基于可见光通信的同时定位与校正方法,其特征在于,所述接收端包括移动设备,通过所述移动设备对所述两个圆形灯以任意角度进行拍摄,得到具有两个圆灯的图像,其中,所述图像中的每个圆形灯被遮挡的面积不超过圆形灯面积的一半。5.根据权利要求4所述的基于可见光通信的同时定位与校正方法,其特征在于,在实际定位应用之前,进行传感器的校正,所述移动设备的拍摄平面与所述圆形灯的平面保持平行,测量出此时所述移动设备的镜头光心到灯平面的距离h。6.根据权利要求5所述的基于可见光通信的同时定位与校正方法,其特征在于,基于所述镜头光心到灯平面的距离h,并通过相似性质计算出焦距的值f0。7.根据权利要求4所述的基于可见光通信的同时定位与校正方法,其特征在于,对所述图像进行处理,检测出所述圆形灯在所述图像上形成的椭圆图像的边界,得到椭圆轮廓,通过所述椭圆的轮廓,利用最小二乘法拟合点集得到两个椭圆的方程。8.根据权利要求7所述的基于可见光通信的同时定位与校正方法,其特征在于,基于所述椭圆轮廓提取出椭圆图像作为感兴趣区域,检测所述感兴趣区域中的明暗条纹并进行解码,得到所述两个圆形灯的实际位置。9.根据权利要求7所述的基于可见光通信的同时定位与校正方法,其特征在于,通过所述两个椭圆的方程,以及所述移动设备的拍摄平面与所述圆形灯的平面的旋转关系,分别得到两个圆形灯所在平面的法向量n;其中,得到所述旋转关系的过程包括:以其中任意一盏灯作为参考灯,其圆心为原点建立世界坐标系,x轴为两圆心连线的方向,利用法向量n得到在相机坐标下的世界坐标系的各个基向量,确定旋转矩阵,得到所述旋转关系。10.根据权利要求9所述的基于可见光通信的同时定位与校正方法,其特征在于,基于所述参考灯的坐标和所述旋转矩阵求解出平移向量,得到在所述世界坐标系下所述移动设备的坐标,结合所述参考灯的实际坐标得到所述移动设备的实际坐标和姿态,完成定位。
技术总结
本发明涉及一种基于可见光通信的同时定位与校正方法,包括:在发射端固定发光源,并对发光源的位置信息进行编码,得到驱动信号,基于所述驱动信号,得到驱动发光源周期发送编码后的位置信息;在接收端,接收所述编码后的位置信息,对其进行解码操作,得到发光源的实际位置,同时根据得到的发光源成像的图形几何特征,得到接收端移动设备的相对位置;确定参考光源,结合参考光源的实际位置和接收端移动设备的相对位置,得到移动设备的实际位置。本发明在难以事先预估得到焦距的大致值时,仍可得到估算的焦距和相机的位姿,且能有较好的精度。因此,本发明适用于多种用途和实际情况下的定位系统,具有广阔的应用前景。具有广阔的应用前景。具有广阔的应用前景。
技术研发人员:文尚胜 陈俊烨 关伟鹏
受保护的技术使用者:广东光寻技术有限公司
技术研发日:2021.10.28
技术公布日:2022/1/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。