1.本发明涉及医药类行业中配药设备上使用的机械手领域,具体涉及一种用于夹持西林瓶的夹头式机械手。
背景技术:
2.目前,医院中配置药物的方式主要是通过医护人员手工操作,这种手工配置药物的方式,需要医护人员手动操作注射器进行药物的抽吸,在西林瓶内药物的配置过程中,通常需要先将母液注射入西林瓶中,然后进行多次摇晃以使得西林瓶中粉末状的药物与母液进行摇匀混合,从而实现药物的溶解,然后再利用注射器将溶解后的药液抽吸出来,注射到吊瓶中进行使用或者直接进行打针操作。
3.上述粉末状的药物与母液的混合过程需要医护人员进行手工摇匀,医护人员工作强度高,尤其是在大型医院的医护站,每天需要进行非常多的西林瓶的药物配置;此外有的药物还存在一定的毒性,对医护人员的安全也有着不小的危险。
4.随着技术的发展,市面上出现了自动配药系统,通过机械手对西林瓶进行定位和夹持以实现对西林瓶内的药物抽吸注射等操作,例如中国专利202021197232.8所公开的一种用于配药机器人的多用手爪,再例如中国专利201210233918.1所公开的配药机器人的机械手爪,又例如中国专利201821136398.1所公开的配药机器人的夹持机构等。
5.在自动化配药过程中,需要同时进行西林瓶的批量上药、夹持和下药操作,现有技术中存在上下药操作繁琐、夹持效果差的缺陷;因此,需要进行改进。
技术实现要素:
6.针对现有技术的缺陷,本发明提供了一种用于夹持西林瓶的夹头式机械手,具有上下药操作便捷、夹持效果好的优点。
7.为了实现上述目的,本发明提供了一种用于夹持西林瓶的夹头式机械手,用于自动化配药系统中进行多个西林瓶的批量上药、夹持和下药操作,夹头式机械手包括盒体和设置于盒体内的多个夹头,盒体上设有用于西林瓶穿过的通孔,夹头包括:两个抓手构件,其对应于通孔设置,两个抓手构件配合进行夹紧或放松西林瓶;其中抓手构件包括抓手本体、啮合部和拉结部,啮合部和拉结部分别位于抓手本体的两端,抓手本体呈v形以进行不同规格西林瓶的夹持,啮合部上设有啮合齿;回转轴,其设置于盒体上,啮合部通过回转轴转动连接在盒体上,其中两个抓手构件上的啮合齿之间相啮合;拉簧,拉簧的两端分别连接在两个抓手构件的拉结部上;推块,推块作用于其中一个抓手构件;其中推块上设有沿推块的推动方向设置的第一推块和第二推块,第一推块位于该其中一个抓手构件的左侧,第二推块位于该其中一个抓手构件的右侧;利用持续向右推进的第一推块与该其中一个抓手构件相抵,驱动两个抓手构件对
向闭合以夹持西林瓶;利用持续向左推进的第二推块与该其中一个抓手构件相抵,驱动两个抓手构件背向打开以放松西林瓶;当第一推块与该其中一个抓手构件之间超过设定间距时,两个抓手构件能够被打开以放入西林瓶并利用拉簧对西林瓶进行预夹紧。
8.在本发明的上述技术方案中,通孔可以是单个圆形孔,也可以是连续的条形孔或者槽,多个夹头可以具有与其一一对应的通孔,也可以是不同的夹头对应于同一个通孔,这里的通孔应当作为广义的理解。
9.作为本发明的另一种具体实施方式,该其中一个抓手构件上设有挡块,挡块设置于推块的运动路径上,其中第一推块位于挡块的左侧,第二推块位于挡块的右侧。
10.作为本发明的另一种具体实施方式,多个夹头形成为线性分布的一组或横纵阵列分布的多组。
11.作为本发明的另一种具体实施方式,夹头式机械手进一步包括驱动用的可动推杆,推块还包括连接部,连接部位于第一推块、第二推块的一侧,其中同组的夹头中的推块均通过其上的连接部固定设置于可动推杆上。
12.作为本发明的另一种具体实施方式,盒体上设有滑动支撑座,可动推杆滑动设置于滑动支撑座上。
13.作为本发明的另一种具体实施方式,夹头式机械手进一步包括用于驱动不同的可动推杆进行同步运动的联动机构,联动机构包括旋转手柄、旋转轴、推出拨杆、退回拨杆和推板;旋转手柄通过旋转轴设置于盒体上;推出拨杆设置于旋转轴上并与旋转手柄进行同步转动;退回拨杆设置于旋转轴上并与旋转手柄进行同步转动,其中推出拨杆与退回拨杆在水平面的投影存在夹角,且在旋转轴的轴向高度方向上,退回拨杆位于推出拨杆的上方;推板分别连接不同的可动推杆;其中推板设置于推出拨杆的旋转路径上,推出拨杆的正向旋转过程中能与推板相抵以推动推板向右运动;其中推板的上方设有抵接用的止挡柱,止挡柱设置于退回拨杆的旋转路径上,退回拨杆的反向旋转过程中能与止挡柱相抵以推动推板向左运动。
14.作为本发明的另一种具体实施方式,夹头式机械手还包括锁定机构,锁定机构用于对旋转手柄的位置进行锁定,其包括锁定齿轮、锁定手柄、锁定转轴和两个防反锁定器;锁定齿轮设置于旋转轴上并与旋转手柄同步转动;锁定手柄通过锁定转轴设置于盒体上;两个防反锁定器设置于盒体上,两个防反锁定器分别用于正向锁定锁定齿轮和反向锁定锁定齿轮;其中锁定手柄的转动能切换两个防反锁定器的位置,改变两个防反锁定器与锁定齿轮的相对状态,从而实现对锁定齿轮的正向锁定、反向锁定和放松。
15.作为本发明的另一种具体实施方式,防反锁定器包括:固定块,设置于盒体上;防反挡板,防反挡板的一端转动连接在盒体上,防反挡板的另一端设有斜齿,斜齿能与锁定齿轮相咬合;
复位弹簧,复位弹簧的一端连接在固定块上,复位弹簧的另一端连接在防反挡板的中部;其中锁定转轴上设有凸起部,通过转动锁定手柄,锁定转轴进行同步转动以使凸起部与防反挡板相抵接,从而使斜齿与锁定齿轮510分离;和,通过转动锁定手柄,锁定转轴进行同步转动以使凸起部与防反挡板分离,利用复位弹簧,斜齿能与锁定齿轮相咬合。
16.作为本发明的另一种具体实施方式,盒体包括底壳和上盖,上盖扣合连接在底壳上,其中上盖和底壳上均设有通孔,上盖的通孔与底壳的通孔的孔径大小相同或不相同。
17.作为本发明的另一种具体实施方式,底壳和上盖均设有支撑凸台,支撑凸台对应于抓手构件的啮合部和拉结部,其中抓手构件的抓手本体与底壳、上盖之间不接触。
18.本发明具备以下有益效果:本发明的夹头具有三种位置,即夹紧位置、中间位置和放松位置,其中在夹紧位置下通过两个抓手构件夹紧西林瓶,此时可以进行正常的抽吸注射和摇匀操作;中间位置用于进行西林瓶的上药操作,此时推块(第一推块和第二推块)均不对抓手构件进行限位,采用拉簧进行限位,在较小外力作用下西林瓶能够迫使两个抓手构件打开进而完成上药,并通过拉簧的作用力对西林瓶进行预夹紧;放松位置用于将摇匀操作后的西林瓶进行一次性快速下药操作,此时两个抓手构件完全放开所夹持的西林瓶,西林瓶可以自动脱离或者手动脱离;本发明具有上下药操作便捷的优点。
19.此外抓手构件采用呈v形的抓手本体以进行不同规格西林瓶的夹持,同时具有夹持效果好的优点。
20.本发明的夹头可以实现完全锁定,通过锁定机构对旋转手柄的位置进行锁定,进而确保旋转手柄所对应的夹头处于夹紧位置、中间位置或放松位置,在摇匀过程中可以保持西林瓶的稳定夹持。
21.下面结合附图对本发明作进一步的详细说明。
附图说明
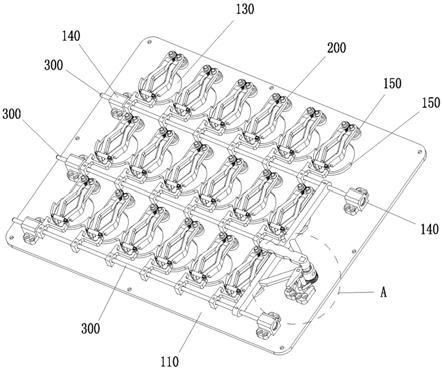
22.图1是本发明实施例1夹头机械手的结构示意图;图2是图1底部视角的结构示意图;图3是本发明实施例1夹头机械手的内部示意图;图4是本发明实施例1夹头机械手的内部投影示意图;图5是图4中c处的放大示意图;图6是图5另一状态的示意图;图7是图3中a处的放大示意图;图8是图4中b处的放大示意图。
具体实施方式
23.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
24.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可
以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
25.实施例1本实施例提供了一种用于夹持西林瓶的夹头式机械手,用于自动化配药系统中进行多个西林瓶的批量上药、夹持和下药操作,如图1-4所示,夹头式机械手包括盒体100和多个夹头200,多个夹头200设置于盒体100内,本实施例中以18个夹头200为例进行详细介绍,其中18个夹头200以3x6方式形成为横纵阵列分布的三组。
26.其中盒体100包括底壳110和上盖120,上盖120扣合连接在底壳110上,其中上盖120和底壳110上均设有通孔130,上盖120的通孔130与底壳110的通孔130的孔径大小相同或不相同,如图1-2所示,本实施例中上盖120的通孔孔径略小于底壳110上的通孔孔径,具体的,通过在底壳110和上盖120设置不同孔径大小的通孔130可以适应于更多种类型的西林瓶。
27.相应的,在其他示例中,通孔130也可以设置为连续的条形通槽。
28.夹头200包括两个抓手构件210、两个回转轴220、拉簧230和推块240;两个抓手构件210对应于通孔130设置,通过两个抓手构件210配合进行夹紧或放松西林瓶,抓手构件210包括抓手本体211、啮合部212和拉结部213,啮合部212和拉结部213分别位于抓手本体211的两端,其中抓手本体211呈v形以进行不同规格西林瓶的夹持,啮合部212上设有啮合齿214;回转轴220设置于盒体100上,啮合部212通过回转轴220转动连接在盒体100上,其中两个抓手构件210上的啮合齿214之间相啮合,在两个抓手构件210产生相对转动时,两个抓手构件210上的啮合齿214产生同步地配合转动。
29.拉簧230的两端分别连接在两个抓手构件210上的拉结部213;推块240作用于其中一个抓手构件210,如图4-5所示,本实施例中的推块240作用于左侧的抓手构件210,其中推块240上设有第一推块241和第二推块242,第一推块241和第二推块242沿推块240的推动方向设置,具体的,在左侧的抓手构件210上设有挡块215,挡块215设置于推块240的运动路径上;进一步的,第一推块241位于挡块215的左侧,第二推块242位于挡块215的右侧。
30.如图5-6所示,利用持续向右推进的第一推块241与挡块215相抵,驱动两个抓手构件210对向闭合以夹持西林瓶,利用持续向左推进的第二推块242与挡块215相抵,驱动两个抓手构件210背向打开以放松西林瓶,当第一推块241与挡块215之间超过设定间距(这里的设定间距大小只要超过待夹持西林瓶在夹持时需要打开的距离即可,例如图6所示的设定间距为第一推块241与第二推块242之间的距离)时,两个抓手构件210能够被打开以放入西林瓶并利用拉簧230对西林瓶进行预夹紧。
31.本实施例的夹头200具有三种位置,即夹紧位置、中间位置和放松位置,其中在夹紧位置下通过两个抓手构件210夹紧西林瓶,此时可以进行正常的抽吸注射和摇匀操作;中间位置用于进行西林瓶的上药操作,此时推块240(第一推块241和第二推块242)均不对抓手构件210进行限位,采用拉簧230进行限位,在较小外力作用下西林瓶能够迫使两个抓手构件210打开进而完成上药,并通过拉簧230的作用力对西林瓶进行预夹紧;放松位置用于将摇匀操作后的西林瓶进行一次性快速下药操作,此时两个抓手构件210完全放开所夹持
的西林瓶,西林瓶可以自动脱离或者手动脱离,具有上下药操作便捷的优点。
32.为了进行本实施例中三组夹头200进行同步运动,如图3-4所示,夹头式机械手进一步包括驱动用的可动推杆300和驱动不同的可动推杆300进行同步运动的联动机构400,其中推块240还包括连接部243,连接部243位于第一推块241、第二推块242的一侧,其中同组的夹头200中的推块240均通过其上的连接部243固定设置于可动推杆300上。
33.具体的,盒体100上设有滑动支撑座140,可动推杆300滑动设置于滑动支撑座140上。
34.如图7-8所示,联动机构400包括旋转手柄410、旋转轴420、推出拨杆430、退回拨杆440和推板450;旋转手柄410通过旋转轴420设置于盒体100上,推出拨杆430设置于旋转轴420上并与旋转手柄410进行同步转动,退回拨杆440设置于旋转轴420上并与旋转手柄410进行同步转动,其中推出拨杆430与退回拨杆440在水平面的投影存在夹角,且在旋转轴的轴向高度方向上,退回拨杆440位于推出拨杆430的上方,以形成错位;其中,推板450分别连接三个不同的可动推杆300,其中推板450设置于推出拨杆430的旋转路径上,推出拨杆430的正向(逆时针方向)旋转过程中能与推板450相抵以推动推板450向右运动;再具体的,推板450的上方设有抵接用的止挡柱451,止挡柱451设置于退回拨杆440的旋转路径上,退回拨杆440的反向(顺时针方向)旋转过程中能与止挡柱451相抵以推动推板450向左运动,在退回拨杆440的反向旋转过程中,退回拨杆440与推板450不产生直接接触。
35.当需要进行可动推杆300向右推出时,逆时针转动旋转手柄410,通过推出拨杆430抵接在推板450上带动可动推杆300向右,当需要可动推杆300向左推出时,顺时针转动旋转手柄410,通过退回拨杆440抵接在止挡柱451上进行可动推杆300向左退回,带动可动推杆300向左。
36.此外,本实施例还包括锁定机构500,锁定机构500用于对旋转手柄410的位置进行锁定,如图7-8所示,其包括锁定齿轮510、锁定手柄520、锁定转轴530和两个防反锁定器540;锁定齿轮510设置于旋转轴420上并与旋转手柄410同步转动,锁定手柄520通过锁定转轴530设置于盒体100上,两个防反锁定器540设置于盒体100上,两个防反锁定器540分别用于正向锁定锁定齿轮510以使得锁定齿轮510无法正向转动,和反向锁定锁定齿轮510以使得锁定齿轮510无法反向转动;其中锁定手柄520的转动能切换两个防反锁定器540的位置,改变两个防反锁定器540与锁定齿轮510的相对状态,从而实现对锁定齿轮510的正向锁定、反向锁定和放松。
37.本实施例中一种具体的防反锁定器540包括固定块541、防反挡板542和复位弹簧543;固定块541设置于盒体100上,防反挡板542的一端转动连接在盒体100上,防反挡板542的另一端设有斜齿544,斜齿544能与锁定齿轮510相咬合,复位弹簧543的一端连接在固定块541上,复位弹簧543的另一端连接在防反挡板542的中部;其中锁定转轴530上设有凸起部531,通过凸起部531位置的切换进行改变两个防
反锁定器540与锁定齿轮510的相对配合位置,以实现对锁定齿轮510(旋转手柄410)的正向锁定、反向锁定和放松,具体为:1)通过转动锁定手柄520带动锁定转手进行同步转动,以使凸起部531与防反挡板542相抵接,从而使斜齿544与锁定齿轮510分离;2)通过转动锁定手柄520带动锁定转手进行同步转动,以使凸起部531与防反挡板542分离,利用复位弹簧543,斜齿544能与锁定齿轮510相咬合。
38.本发明中利用锁定机构500可以实现夹头200的完全锁定,通过锁定机构500对旋转手柄410的位置进行锁定,进而确保旋转手柄410所对应的夹头200处于夹紧位置、中间位置或放松位置,在摇匀过程中可以保持西林瓶的稳定夹持。
39.在本发明的优选示例中,底壳110和上盖120均设有支撑凸台150,如图3所示,支撑凸台150对应于抓手构件210的啮合部212和拉结部213,其中基于支撑凸台150的存在,抓手构件210的抓手本体211与底壳110、上盖120之间不接触。
40.虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
