1.本发明涉及一种激光传感器模块,其中,该激光传感器模块具有检测该激光传感器模块的发射窗的污物的能力。激光传感器模块能够测量颗粒密度、流体速度、姿势、到物体的距离和/或物体的存在。本发明还涉及一种包括激光传感器模块的装置、特别是包括激光传感器模块的检测器装置或移动通信装置。本发明还涉及一种检测激光传感器模块的发射窗的污物的方法和相应的计算机程序。
背景技术:
2.wo2018/104153 a1公开了一种用于使用干涉或自混合干涉测量颗粒的颗粒密度的激光传感器模块。激光传感器模块包括适于发射测量激光束的激光器。光学布置结构将测量光束聚焦到测量体积。激光束被发射穿过激光传感器模块的发射窗。在激光传感器模块的发射窗被大颗粒阻挡的情况下,建议通过以预定时间周期以调制的驱动电流驱动激光器之一来检测阻挡物体。然而,该文件没有公开如何以可靠的方式执行阻挡物体的检测。
3.可靠地检测激光传感器模块的发射窗的污物,即使污物仅由装置用户的指纹产生,对于利用激光传感器模块进行可靠的测量也很重要,因为这样的污物会对测量的准确性产生影响。
4.us2008/0088702 a1公开了一种车辆的相机系统,其包括具有光束路径的相机,该相机具有至少一个光学元件以将图像信息引导至光敏图像传感器。至少一个测试光束可以耦合到布置在光束路径前面的输入侧的透明测试元件上,根据测试元件的污物程度,指示污物的至少一部分光束可从测试元件被定向到用于接收指示污物的该部分光束的传感器。
5.us2009/0279070 a1公开了一种半导体激光器,其操作为使得振荡波长单调增加的第一振荡周期和振荡波长减小的第二振荡周期交替存在。光电二极管将从激光器发出的激光和来自测量目标的返回光转换为电信号。计数单元对在第一和第二振荡周期的每一个周期中从光电二极管的输出信号获得的干涉波形分量的数量进行计数。计算装置根据计数单元对干涉波形分量的数量进行计数期间的最短激光波长和最长激光波长以及由计数单元获得的计数结果来计算距测量目标的距离。这使得可以测量距移动测量目标的距离和测量目标的速度。
技术实现要素:
6.本发明的目的是提供一种激光传感器模块,该激光传感器模块对利用传感器模块执行的测量具有提升的可靠性。
7.另一个目的是提供一种具有这种改进的激光传感器模块的装置。
8.另一个目的是提供一种可靠地检测激光传感器模块的发射窗的污物的方法。
9.另一个目的是提供一种相应的计算机程序,该计算机程序可以由激光传感器模块或具有激光传感器模块的装置执行。
10.本发明由独立权利要求限定。下面提供的说明书和从属权利要求限定了有利的实
施例。
11.根据第一方面,提供了一种激光传感器模块。该激光传感器模块可以适合于测量颗粒的颗粒密度、流体速度、姿势、到物体的距离和/或物体的存在。激光传感器模块包括至少一个激光二极管、用于向激光二极管提供驱动电流的电驱动器、检测器和用于将激光束聚焦到聚焦区域的光学布置结构。激光二极管布置为能够使激光束发射穿过光学布置结构到达聚焦区域,其中,光学布置结构包括发射窗。检测器布置为能够确定干涉信号。激光传感器模块包括污物检测单元,该污物检测单元配置为能够在预定时间周期内以变化幅度来变化激光束的波长,以基于在激光束的波长变化期间的干涉信号提供指示发射窗污物的污物检测信号。变化幅度和预定时间周期设定为能够生成具有1khz至100mhz、优选地1khz至50mhz、进一步优选地10khz至1mhz的范围内的频率的污物检测信号。优选地,波长变化的预定时间周期使得污物检测信号的持续时间在1μs至5ms、优选地10μs至1ms的范围内。
12.干涉信号可以是激光二极管的激光腔内的光波的自混合干涉(smi)信号。干涉信号或自混合干涉信号可以由被至少一个颗粒或物体反射或散射的激光束的激光生成,也可以由来自污物的散射生成。激光传感器模块可以包括两个、三个、四个或更多个激光二极管和相应的检测器。使用多个激光束代替一个激光束进行污物检测可以具有以下优点:可以减小由于污物处的散斑引起的污物检测信号的变化以及增大污物检测信号的幅度,如下文将进一步描述的。由不同激光器发射的激光束在透射穿过发射窗时可以相对于彼此倾斜。
13.激光束在设定或预定时间周期内的波长变化使得能够从波长变化期间的干涉信号检测激光传感器模块的发射窗的污物。在预定时间周期内,波长变化在激光二极管和发射窗之间产生光学路径长度差(波数)。预定时间周期选择为能够提供具有可由传感器模块或具有传感器模块的装置的前端电子器件顺利地检测的频率和持续时间的污物检测信号。
14.实验表明,例如基于干涉特别是自混合干涉测量的对颗粒密度的测量对于发射激光束或激光束所穿过的发射窗的污物是敏感的。发射窗的污物或赃物可能会降低发射激光和背反射激光的强度(导致相应的两倍传输损耗)。此外,污物也可能影响测量体积中的光斑质量。这两种缺陷都会导致检测到的颗粒浓度出现不期望的降低。发射窗的污物或赃物导致激光的散射。该散射激光的一部分将被反射或散射回激光二极管的激光腔。赃物越多,反射到激光腔的激光就越多。这种反射激光仅会引起激光输出的直流功率的微小变化,这也取决于反射激光相对于激光腔中驻波图案的相位差。因此,不能将来自赃物或污物的散射光以直接的方式用在使用干涉或自混合干涉来检测污物中。从理论和实验可知,如果改变激光束的波长,则反射激光的路径长度会发生变化。这些光学路径长度变化(波数)将生成可检测的干涉信号。然而,更深入的见解表明,仅改变激光束的波长不足以可靠地检测发射窗上的污物、特别是指纹或非常细小的灰尘。对于污物的可靠检测,合适的检测信号的频率和检测信号的持续时间是污物的最佳检测的先决条件。进一步的见解表明,检测信号的频率和检测信号的持续时间取决于波长变化的时间尺度。换句话说,波长变化的速度应该设定为使得:污物检测信号的频率在1khz到100mhz、优选地1khz到50mhz、进一步优选地10khz到1mhz的范围内,并且污物检测信号的持续时间在1μs至5ms、优选地10μs至1ms的范围内。
15.污物检测信号的频率f可通过f≈(1/t)
·
2d
·
(
△
λ/λ2)与预定时间周期t、激光二极管与发射窗之间的光学距离d和波长变化
△
λ相关,其中,λ是激光二极管发射的激光束的
标称波长。由于d是固定的,并且对于激光二极管
△
λ被限制在标称波长λ附近,因此可以适当地选择时间周期t(或变化速度
△
λ/t)以实现可靠的污物检测所需的检测信号的频率和持续时间。如果检测信号的频率太低和/或持续时间太短,则可能不能以可靠的方式进行污物检测。
16.可以通过单独增大、单独减小、或者增大和减小波长来改变波长。
17.光学布置结构可以包括用于将激光束聚焦到聚焦区域的光学元件、例如透镜。光学元件的一个表面可以包括发射窗。发射窗可以例如是透镜的外表面。发射窗可替代地与光学元件物理分离、例如是覆盖光学元件的盖玻璃。
18.用于污物检测的波长变化可以基于激光二极管的驱动电流变化和/或偏置电压变化和/或温度变化。驱动电流变化优于温度变化,因为它允许比温度变化更好地控制和设定预定时间周期。对于足够的波长变化的温度变化发生在较长的时间尺度上,从而导致生成的污物检测信号频率较低。使用驱动电流变化允许将预定时间周期设定得更短,从而导致更高的检测频率。
19.有利地,驱动电流变化的斜率可以设定为使得信号中存在至少3个正弦波、例如3、4或5个正弦波可用于正确检测。斜率可以是单斜率或多斜率。
20.斜率可以在0.05ma/ms至1000ma/ms、优选地在1.5ma/ms至150ma/ms、进一步优选地在5ma/ms至50ma/ms的范围内。
21.污物检测单元可以布置为能够使电驱动器向激光二极管提供在预定时间周期内变化的驱动电流,其中,驱动电流变化的幅度在例如0.5ma至2ma的范围内、优选地为1ma左右。驱动电流在给定范围内的幅度变化可能导致足够的波长偏移,并且结合典型的激光二极管标称波长和从激光二极管到发射窗的典型距离在检测信号中生成足够数量的波以适用于可靠的信号读出。
22.波长变化的预定时间周期可以在1μs至5ms的范围内、例如10μs至200μs的范围内。已经发现在该给定范围内的改变激光束的波长的预定时间周期非常适合于生成具有在期望范围内的频率和持续时间的污物检测信号。
23.污物检测单元可以布置为能够使电驱动器向激光二极管提供在预定时间周期内以一定斜率变化以使得激光束的波长在预定时间周期内线性变化的驱动电流。
24.随时间线性地改变激光束的波长是有利的,因为污物检测信号则具有固定的单一频率。单一频率有利于检测。然而,检测信号也可以具有变化的频率、例如随时间线性变化的频率。
25.在发射波长对给定激光二极管的驱动电流的依赖性是线性的情况下,污物染检测单元可以布置为能够使电驱动器向激光二极管提供在预定时间周期范围内以线性斜率变化的驱动电流。在发射波长对驱动电流的依赖性是非线性的情况下,污物检测单元可以布置为能够使电驱动器向激光二极管提供具有适于在预定时间周期内实现线性波长分布的电流变化分布或非线性斜率的驱动电流。
26.用于驱动激光二极管以改变激光束的波长的驱动电流可以在预定时间周期期间以单一斜率或以多斜率变化、例如以锯齿轮廓的形式变化。
27.污物检测单元可以布置为能够使电驱动器向激光二极管提供根据波形在预定时间周期内变化的驱动电流。这种波形可以是三角波形或正弦波形。
28.用于污物检测的变化驱动电流可以低于在激光传感器模块的测量模式下提供到激光二极管的驱动电流。激光传感器模块的测量模式是激光传感器模块操作以执行测量、例如颗粒密度、流体速度、姿势、距物体的距离和/或物体的存在的测量的模式。通常,激光二极管在对眼睛无害的输出功率范围内工作。因此,上述措施在激光传感器模块的污物检测操作期间也确保了眼睛安全。
29.进一步的见解是,由于发射窗上的污物位置处、例如指纹处的散斑图案,污物检测信号的幅度可能会发生巨大变化。污物检测信号的这些幅度变化会降低污物检测的可靠性。在一个实施例中,如果激光传感器模块包括多于一个激光二极管、例如两个、三个、四个或更多个激光二极管,其中,每个激光二极管根据上述和本说明书中的任何实施例发射具有波长变化的激光束,则可以减小这些幅度变化。根据存在的激光束的数量,在污物位置处将出现相应数量的独立且最有可能不同的散斑图案。因此,在污物处反向散射的激光束中的至少一个生成具有更高幅度的检测信号的可能性增加。激光束可以同时或以时间交错的方式发射。
30.优选地,激光束由光学布置结构定向为使得它们在基本相同的位置穿过发射窗。激光束优选地以不同的角度穿过发射窗,从而在污物位置处生成不同的散斑图案。
31.减小信号的幅度变化的另一种措施可以是改变散斑图案本身,在提供或不提供多于一个激光束的情况下。这种散斑图案变化可以通过相对于发射窗移动激光二极管或通过移动光学布置结构使得例如激光束以不同的角度穿过发射窗来实现。通过执行多次污物检测测量,在该实施例中也增加了获得具有足够幅度的检测信号的可能性。
32.根据第二方面,提供了一种包括根据第一方面的激光传感器的装置。
33.该装置可以是颗粒检测器、流体速度检测器、手势检测器、物体检测器、空气净化器、通风罩或诸如移动通信装置的可穿戴装置。
34.该装置可以包括指示器,该指示器布置为基于污物检测信号向该装置的用户提供指示。指示器可以包括适合于通知用户的任何种类的接口。指示器可以例如包括扬声器或显示器。指示器可以例如是移动通信装置的显示器。指示器可以例如基于指示信号向用户呈现校正的测量值、例如颗粒密度,其中,根据发射窗的污物程度,校正值可以例如为绿色(没有相关污物)、黄色或红色(严重污物)。指示可以替代地是指示发射窗以严重方式被污染或弄脏的视觉的、听觉的或触觉的信号。
35.该装置还可以布置为能够基于污物检测信号确定发射窗的污物的定量测量,并且在颗粒检测的情况下,基于确定的污物的定量测量来校正测量的颗粒密度。借助于检测器测量的原始数据可以经由接口传输到装置。该装置可以包括评估器以基于由激光传感器模块提供的原始数据确定该定量测量。上述功能也可以由激光传感器装置本身来执行。
36.根据第三方面,提供了一种检测激光传感器模块的发射窗的污物的方法。该方法包括以下步骤:
37.使激光束发射穿过发射窗,
38.在预定时间周期内变化激光束的波长,
39.基于变化的波长确定干涉信号,
40.基于在波长变化期间确定的干涉信号提供指示发射窗的污物的污物检测信号。
41.根据第四方面,提供了一种计算机程序。计算机程序包括程序代码工具,当所述计
算机程序在第一方面的激光传感器模块的处理器或第二方面的装置的处理器上执行时,所述程序代码工具使第一方面的激光传感器模块或第二方面的装置执行第三方面的方法的步骤。
42.应当理解,第一方面的激光传感器模块、第二方面的装置和第三方面的方法具有相似和/或相同的实施例。
43.应当理解,本发明的优选实施例还可以是从属权利要求与相应独立权利要求的任意组合。
44.其他的有利实施例在下文限定。
45.本发明的这些和其他方面将通过参考附图在下文中描述的实施例而变得显而易见并被阐明。
附图说明
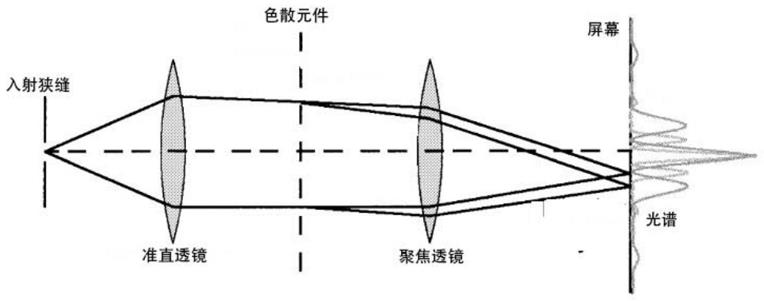
46.图1示出了用于激光传感器模块的光学配置结构的原理示意图;
47.图2示出了根据一个实施例的激光传感器模块的原理示意图;
48.图3示出了随驱动电流变化的斜率变化的污物检测信号的频率的示图;
49.图4示出了随驱动电流变化的斜率变化的污物检测信号的持续时间的示图;
50.图5示出了当使用一束激光束进行污物检测时,因散斑引起的污物检测信号的幅度分布的示图;
51.图6示出了当使用多束单独的激光束进行污物检测时,因散斑引起的污物检测信号的幅度分布的示图;
52.图7示出了用于包括三个激光二极管的激光传感器模块的光学布置结构的实施例;
53.图8示出了一种移动通信装置的原理示意图;以及
54.图9示出了一种检测激光传感器模块的发射窗的污物的方法的原理示意图。
55.在图中,相同的附图标记始终指代相同的物体。图中的物体不一定按比例绘制。
具体实施方式
56.在描述本发明的实施例之前,将提供自混合干涉(smi)的基本描述。
57.自混合干涉用于检测物体的运动和到物体的距离。关于自混合干涉的背景信息在通过引用合并于此的
“″
laser diode self
‑
mixing technique for sensing applications
″
,giuliani,g.;norgia,m.;donati,s.&bosch,t.,laser diode self
‑
mixing technique for sensing applications,journal of optics a:pure and applied optics,2002,4,p.283
‑
p.294”中被描述。在第wo 02/37410号国际专利申请中详细描述了在光学输入装置中检测指尖相对于传感器的运动,该国际专利申请通过引用合并于此。基于第wo 02/37410号国际专利申请中呈现的示例来讨论自混合干涉的原理。具有激光腔的激光二极管被设置用于发射激光或测量光束。该装置在其一侧处设有透明窗,物体、例如手指在该透明窗上移动。在激光二极管与所述窗之间布置透镜。该透镜聚焦激光束。如果在激光束中存在物体,则它将散射测量光束。测量光束的辐射的一部分在照射光束的方向上散射,并且该部分被透镜朝向激光二极管的发射表面会聚,并重新进入该激光器的腔。
重新进入激光二极管的腔的辐射引起激光器增益的变化,从而引起由激光器发射的辐射强度的变化,这种现象被称为激光二极管中的自混合效应。
58.由激光器发射的辐射或激光腔中的光波的强度的变化可以由光电二极管或检测器来检测,所述光电二极管或检测器布置为确定跨激光腔的阻抗变化。二极管或阻抗检测器将辐射变化转换为电信号,电子电路被设置用于处理该电信号。
59.图1示出了用于基于smi的激光传感器模块的光学配置结构10的构件的示例,其示例性地配置用于颗粒检测。光学配置结构10包括激光二极管/检测器布置结构12。激光二极管/检测器布置结构12可以包括与光电二极管集成的垂直腔面发射激光器,二者一起用附图标记14标记。这样的布置结构14也缩写为vip。
60.光学配置结构10还包括光学布置结构16,该光学布置结构16可以包括光学构件18、例如透镜。光学布置结构16还包括发射窗20。发射窗20可以是装置、例如包括光学配置结构10的移动通信装置的盖玻璃。然而,发射窗20也可以是光学构件18的发射表面22、例如透镜发射表面。vip 14发射具有一定波长的激光束24。例如,波长可以是850nm。波长可以长于或短于850nm。通常,vcsel形式的激光二极管可以发射近红外或红外光谱波长范围内的激光。激光束24穿过光学布置结构16。光学构件18将激光束24聚焦到聚焦区域26。聚焦区域26中的颗粒或物体(未示出)将激光散射回来,并且至少部分激光通过光学构件18重新进入激光二极管。激光重新进入激光二极管的谐振腔。vip 14的光电二极管如上所述地检测自混合干涉信号。
61.在颗粒检测的情况下,自混合干涉信号可以例如以短信号突发或多个信号突发为特征。在这些信号中观察到的多普勒频率是用于沿着光轴的颗粒速度的量度。因此,可以优选地引用直流驱动电流来简化信号检测和信号分析。可以使用调制的驱动电流以便例如借助于自混合干涉信号来确定颗粒的位置或速度,所述自混合干涉信号可以通过激光在较大颗粒或妨碍物体处的反射而生成。可以在一次测量内或在随后的测量步骤中确定距离(以及可选的速度)。
62.当发射窗20被污染或弄脏时、例如由于指纹或灰尘污染或弄脏时,如箭头28所示的激光束24的散射将也会发生在污物或赃物上。该散射激光的一部分将被反射回激光二极管14中。重新进入激光二极管14的散射激光也生成smi信号。污物或赃物越多,朝向激光二极管14反射或散射回的激光就越多。然而,这种散射或反射的激光只会引起激光二极管输出的直流功率的微小变化,这也取决于返回的激光相对于激光二极管中的激光的相位差。因此,从污物或污染散射的激光不能以直接的方式用在使用smi激光传感器模块检测污物或赃物中。
63.在下文中,将描述基于干涉信号、特别是smi信号可靠地检测发射窗的污物或赃物的激光传感器模块以及方法。发射窗20的污物或赃物的检测对于颗粒检测的可靠性和准确性是必不可少的。
64.污物或赃物可以是激光束24穿过(或跨过)发射窗20的位置处的指纹。污物也可以是发射窗20上的细小灰尘颗粒。
65.图2示出了激光传感器模块40的一个实施例的原理示意图。激光传感器模块40在本实施例中配置用于测量在流体、例如空气中的具有小于20μm、优选地小于10μm的尺寸的颗粒42的颗粒密度。激光传感器模块40包括激光二极管44。应当理解,激光传感器模块40可
以包括不止一个激光二极管44、例如三个或甚至更多个激光二极管44,如下文将进一步描述的。激光传感器模块40还包括电驱动器46,其用于向激光二极管44提供驱动电流,使得当激光二极管44被提供有足够强度的电驱动电流时,激光二极管44发射激光束48。激光传感器模块40还包括检测器50。如上所述,检测器50可以是与激光二极管44集成的光电二极管。激光二极管44可以是与检测器或光电二极管50集成的垂直腔面发射激光器(vcsel),使得激光二极管44和检测器50的布置结构是vip。检测器50可以确定激光二极管44的激光腔中的自混合干涉信号。根据一个替代实施例(未示出),检测器50可以是单独的光电二极管,其布置为能够接收基于发射的激光和反射的激光的干涉的干涉信号。激光二极管44布置为能够将激光(如激光束48)发射到包括透镜54的光学布置结构52。透镜54的外表面包括激光传感器模块40的发射窗56。在其他实施例中(见图1)发射窗56可由如从移动通信装置已知的盖玻璃的外表面形成。光学布置结构52将激光束48聚焦到聚焦区域58。聚焦区域58中的颗粒42将激光的一部分反射或散射回透镜54并最终反射或散射到激光二极管44的激光腔,导致激光腔中驻波图案与反射激光的自混合干涉。相应的自混合干涉信号借助于检测器50被检测并且相应的测量信号被传输到评估器60,评估器60用于评估干涉信号,以便例如测量颗粒密度。
66.当发射窗56被污染或弄脏时,如污物62所示,将发生激光在该污物62上的散射,如箭头64所示。该散射光的一部分(由箭头66指示)将重新进入激光二极管44。赃物或污物62越多,朝向激光二极管44散射或反射的激光就越多。这种反射光只会引起激光输出的直流功率的微小变化,这也取决于返回的激光相对于激光二极管44中的激光的相位差。因此,从污物或赃物62散射的激光不能以直接的方式用在使用自混合干涉激光传感器检测赃物中。
67.为了使激光传感器模块40能够可靠地检测发射窗56的污物62,激光传感器模块40包括污物检测单元70。污物检测单元70配置为能够在预定时间周期内改变激光束48的波长,以基于在激光束48的波长变化期间由检测器50检测到的干涉信号提供指示发射窗56的污物62的污物检测信号,如下面将更详细描述的。检测器50可以在波长变化期间确定污物检测干涉信号,并且评估器60可以评估或进一步处理污物检测信号、例如以便向用户生成警告和/或校正测量参数、例如颗粒密度。
68.激光二极管44的发射的激光的波长变化导致光学路径长度变化(波数)。
69.激光束48的波长变化可由驱动电流变化和/或偏置电压变化和/或温度变化引起。
70.当激光二极管44的驱动电流接通时,波长变化的一个来源是激光二极管44本身。这导致波长增大,由参数
△
λ/
△
i或dλ/di给出,其中,
△
λ或dλ是波长变化,
△
i或di是电流变化。对于标称输出波长为850nm的vcsel激光二极管,dλ/di的典型值为0.65nm/ma。0.5mw输出功率的典型激光二极管驱动电流为1.75ma。这意味着实际上大约1ma的电流变化可用于具有足够信噪比(snr)的可靠检测。在非常低的输出功率下,snr太差。因此,在幅度为1ma的电流变化下,可以实现0.65nm的波长变化。这种波长变化几乎是瞬时发生的,时间尺度约为1μs。
71.由于激光二极管44在接通时的加热而出现波长变化的另一个来源。这种温度变化发生在大约1s的时间尺度上,与发射波长随着驱动电流的变化而变化的时间尺度相比,该时间尺度更长。根据温度变化的波长变化约为0.065nm/k。例如温度升高30度,这会导致波长偏移约2nm。
72.驱动电流变化以及温度变化基本上可以用于改变激光束48的波长以生成用于检测发射窗56的污物62的合适的污物检测干涉信号。
73.对于合适和可靠的污物检测信号,发生波长变化的时间尺度可能很重要。假设激光二极管在t秒内以线性斜率接通(或正在升温)。由波长变化引起的污物检测信号的频率变化由f≈(1/t)
·
2d
·
(
△
λ/λ2)给出,其中,f是污物检测信号的频率,t是波长变化的上升时间(预定时间周期),d是从激光二极管44到发射窗56的光学距离,
△
λ是波长变化以及λ是激光二极管44的标称或工作波长。
74.对于每个检测系统、例如由检测器50给出的检测系统,对波长变化的上升时间t(预定时间周期)和污物检测信号的持续时间的要求可能有所不同。通过选择合适的t值,可以调整检测信号的频率和检测信号的持续时间,从而获得最佳检测性能。这导致由发射窗56上的诸如指纹或其他脏物的污物导致的检测信号的最高snr值。这将在下面进一步描述。
75.为了最可靠地检测由污物62引起的干涉信号,期望以单一频率生成污物检测信号。在波长变化优选地由驱动电流变化产生的情况下,这意味着驱动电流变化应该随时间线性变化。在激光器驱动电流到波长的非线性转换的情况下,可以使用稍微调整的电流分布以获得线性波长变化分布。因此,如果污物检测单元70布置为能够使电驱动器46在预定时间周期t内向激光二极管提供变化的驱动电流,使得激光束48的波长在预定时间周期内线性变化,则这是优选的。
76.尽管污物检测信号的单一频率具有优势,但根据本发明的原理,其他特性、例如污物检测信号的频率随时间线性变化不被排除。
77.在检测器50方面,其电子器件应该能够确定关于由激光器功率变化引起的大斜率信号的小频率信号,该激光器功率变化由驱动电流变化引起。
78.激光传感器模块40能够检测由来自污物62的杂散激光结合上述波长变化生成的污物检测信号的频率。原则上,与用于检测颗粒相同的方法、例如快速傅立叶变换(fft)树解决方案,可用于检测生成的污物检测信号的频率。
79.为了实现可靠的检测,污物检测信号的频率应该在可检测的频率范围内。如上所述,污物检测信号的频率取决于发生波长变化的上升时间t。该上升时间在本公开中也称为预定时间周期。例如,污物检测信号的合适频率范围在1khz至10mhz之间。因此,污物检测单元70配置为能够设定预定时间周期使得生成的污物检测信号的频率范围在1khz至100mhz、优选地1khz至50mhz、进一步优选地10khz至1mhz的范围内。这种频率范围适用于例如使用fft树解决方案来检测信号。
80.如果激光束48的波长变化基于温度变化,则所得检测信号的频率可能太低。例如,对于1s的上升时间t,在该上升时间t,波长因升温而变化,可以生成频率低至约15hz的检测信号。该频率对于可靠检测来说可能太低。此外,由于加热的典型指数函数,检测信号的频率将随时间变化,这不是最佳的。因此,更优选地,用于污物检测的波长变化基于驱动电流变化。
81.当使用驱动电流变化以产生激光束48的波长变化时,产生波长变化的时间尺度或上升时间t可以设定为较低的值以获得足够高的污物检测信号的频率以用于正确检测。
82.这可以通过以期望的上升时间t接通激光器驱动电流来实现。驱动电流变化的幅度应约为1ma。这是因为激光二极管44必须充分接通以可靠地检测污物检测信号。另一个原
因是为了可靠的信号检测,优选地例如大约有5个正弦波可用。例如,具有0.65nm/ma的波长偏移、结合从激光二极管44到发射窗56的典型光学距离2.5mm和850nm的标称激光波长,这引起4.5个正弦波。因此,污物检测单元70可以布置为能够使电驱动器46向激光二极管44提供在预定时间周期t内以0.05ma至2ma范围内、优选地为约1毫安的幅度变化的驱动电流。此外,污物检测单元70可以布置为能够使电驱动器46向激光二极管44提供在预定时间周期t内以斜率、例如线性斜率变化的驱动电流。
83.图3示出了随激光器驱动电流的斜率变化的最终的smi频率f。激光器驱动电流的斜率以ma/ms为单位给出。激光器驱动电流的斜率是波长变化幅度和上升时间t的量度,并因此决定了污物检测信号的频率f。如上所述,污物检测信号的频率范围可以在1khz至10mhz之间。为了生成该范围内的污物检测信号的频率,激光器驱动电流变化的斜率可以在2ma/ms至1000ma/ms之间的范围内。该范围是激光器驱动电流变化的斜率的优选工作范围,并由图3中的箭头74指示。
84.可以使用具有小的幅度变化的短上升时间t或通过使用具有大的幅度变化的相对长的上升时间t来生成驱动电流变化的前述斜率。对于从激光二极管44到发射窗56的短距离,优选大的幅度变化以生成足够的正弦信号波。这种优选的另一个原因是生成具有足够长的信号持续时间的污物检测信号。
85.采用fft算法作为污物检测算法,,污物检测信号的持续时间应大于用于可靠检测的一个检测块。对于最高检测频率,检测块的典型长度可以对应于4.5μs,对于最低检测频率,该典型长度大约为0.6ms。
86.图4示出了示出针对各单一变化斜率,随驱动电流变化的斜率变化的污物检测信号的持续时间t的示图。该示图是针对1ma幅度变化和典型的850nm vcsel特性绘制的。当驱动电流变化的斜率在1.5ma/ms至150ma/ms之间的范围内时,污物检测信号的0.005ms至0.5ms范围内的持续时间t与特定asic设计的检测窗相匹配。因此,从污物检测信号的持续时间和污物检测信号的频率的角度来看,对于大约10ma/ms至100ma/ms的驱动电流变化的斜率,可以获得良好的检测结果。污物检测模块可以配置为能够使电驱动器46向激光二极管44提供以斜率变化、例如以线性单一斜率变化的驱动电流,该斜率在1.5ma/ms至1000ma/ms的范围内、优选地1.5ma/ms至150ma/ms的范围内、进一步优选地10ma/ms至100ma/ms的范围内。
87.上述以ma/ms为单位的数字是针对幅度变化为1ma的单一驱动电流变化斜率。在较低的幅度变化下,检测信号将变得太短而无法进行可靠的检测,因此优选地将用于检测的驱动电流变化瞄准为约1ma。对于这样的幅度,电流变化的上升时间或预定时间周期t应该在10μs至100μs之间。这基本上可以使用阶梯式电流增加(dac)来实现。例如,可以将步长设为5μa,从而在200个步长中实现100μs斜率,每个步长为0.5μs。替代地,可以使用能够产生线性驱动电流斜坡的模拟电路。
88.当考虑激光二极管的输出功率时,对于具有0.4mw/ma的输出功率斜率的典型激光二极管,1ma激光器驱动电流变化导致0.4mw输出功率变化。对于与光电二极管集成的vcsel(vip),在1mw激光二极管输出功率下的光电二极管电流通常为1ma。这意味着将存在400μa的光电二极管电流变化。光电二极管模拟前端应该能够处理这种光电二极管电流变化。这可以通过在模拟前端使用合适的带通滤波来完成。替代地,可以以模拟方式或数字方式主
动消除直流电流。光电二极管模拟前端通常具有数字直流电流消除功能。在这种情况下,避免模拟前端削波的解决方案是应用阶梯式激光器驱动电流,也应用光电二极管电流消除的阶梯式适应。
89.作为一个实际示例,可以首先确定用于正确激光功率的正确激光驱动电流。这可以是最终控制中激光功率设定微调的一部分,其中,随激光器驱动电流变化的激光二极管功率被测量。在这个微调过程之后,光电二极管的电流斜率也是已知的,并且知道如何控制激光器的驱动电流和光电二极管的电流消除。
90.之后,标称激光功率可针对激光器的驱动电流的1ma以下的值被降低,并且污物检测信号的评估可被执行。使用这样的方法,保证了眼睛安全。因此,在预定时间周期内变化的驱动电流优选地低于当测量颗粒密度时提供给激光二极管44的驱动电流。
91.基于检测到的污物,在固件中可以基于所确定的污物检测信号的信号强度决定对测量的颗粒密度进行校正。替代地,可以警告用户在测量颗粒密度之前清洁发射窗56。
92.可以设想除上述实施例之外的其他实施例。例如,代替单一驱动电流变化斜率,污物检测单元70可以布置为能够使电驱动器46向激光二极管44提供根据波形在预定时间周期t内变化、即在预定时间周期t内增大和减小的驱动电流。特别地,波形可以是三角波。这可能是有利的,因为可以增加污物检测信号的持续时间。当使用三角驱动电流波形时,调整幅度变化使得smi信号在过渡点附近没有相位跳跃可能是有益的。在这种情况下,信号斜率与fft的同步不相关。
93.激光反射也可能发生在印刷电路板(pcb)上,其路径是从污物散射或反射的激光的2倍。这意味着在检测方法中,可以在污物检测信号和源自激光传感器模块40的其他位置的最终其他信号之间进行区分。
94.此外,带通滤波器、陷波滤波器、匹配滤波器、缩放fft等可用于污物检测信号的频率的最优检测。可选地,可以使用附加的数字消除趋势。如果需要,则可以调整fft设计(块大小和中心率),以便更适于优化检测发射窗56上的指纹等污物。
95.另外将参照图5至图7描述污物检测的另一方面。
96.图2中发射窗56的污物62(例如指纹、细尘、污迹)可在污物位置处造成激光束48的散斑图案。散斑导致污物检测信号的幅度的较大变化,这使污物检测信号劣化并因此降低了污物检测的可靠性。图5示出了当仅使用固定在空间中的一束激光束48(1个发射轴线)进行污物检测时,散斑对检测信号的幅度的影响。图5示出了测量的源自扩散板(模拟污物)的检测信号的强度的示例分布。图5中的示图中的横轴示出相对检测信号电平(相对于测量到的最大信号电平),纵轴示出相对信号电平在测量中出现的次数。从图5中可以看出,最小的信号强度具有最高的发生概率。这对于检测发射窗的污物是不利的。
97.当有散斑时改善污物检测的一种措施是有更多的激光束用于污物检测、例如两个、三个、四个甚至更多的激光束。当多个激光束被发射并穿过发射窗56时,相应数量的独立散斑图案将出现在发射窗上的污物位置处。这意味着具有更高可用的信号电平的散斑图案的机会增加。图6示出了与图5类似的图,其中,现在3个(作为示例)激光束用于污物检测。图6示出了当单独使用从三个光束的信号中获得的最大信号强度时的信号强度分布。获得来自发射窗56上的污物的可测量信号的可能性大大增加。当使用多个激光束时,所有激光束最好在大约相同的位置穿过发射窗56(盖玻璃或透镜54的外表面),使得针对所有激光,
测量位置都相同,并且测量位置等同于可能因污物62而导致计数率降低的位置。
98.激光传感器模块40因此可以具有多个激光二极管44和相应数量的检测器50。图7示出了激光传感器模块40的一个实施例的一部分,该激光传感器模块包括例如发射激光束48a、48b、48c的三个激光二极管44a、44b、44c。光学布置结构包括透镜54,该透镜设计为将激光束48a、48b、48c定向为穿过盖玻璃57,使得激光束如图7所示地基本上在相同位置处穿过发射窗56,发射窗56在此是盖玻璃57的外表面。对于污物检测,激光束的波长如本文所述变化。激光束48a、48b、48c可以同时或顺序地发射。
99.减小信号的幅度变化的另一个实施例可以是改变散斑图案本身,在提供或不提供不止一个激光束的情况下。这种散斑图案变化可以通过相对于发射窗移动激光二极管或通过移动光学布置结构使得例如激光束以不同的角度穿过发射窗来实现。通过执行多次污物检测测量,获得具有足够幅度的检测信号的可能性增加。
100.图8示出了包括如上所述的激光传感器模块40的移动通信装置90的原理示意图。激光传感器模块40适于发射一个或多个激光束48,如上文关于图7所述。移动通信装置90包括可配置为触摸屏的用户接口92。移动通信装置90还包括主处理装置94和与其连接的主存储装置96。主处理装置94还与激光传感器模块40连接。主处理装置94可包括上面描述的评估器60的至少部分功能。主处理装置94将例如与颗粒检测相关的数据存储在主存储装置96中。在一个替代实施例中,主处理装置94和主存储装置96也可以仅用于准备或调整借助于激光传感器模块40提供的数据,使得数据可以通过用户接口92呈现给移动通信装置90的用户。激光传感器模块40可以借助于移动通信装置90的电源供电。主处理装置94可以布置为能够在如上所述的激光束48的波长变化期间如上所述确定激光传感器模块40的发射窗的污物。主处理装置94还可布置为能够基于污物检测信号计算和校正颗粒密度或发起误差信号。相同的原理可以用在包括激光传感器模块40的其他装置中。空气净化器或通风罩、速度检测器、手势检测器、物体检测器可以例如包括激光传感器模块40。
101.图9示出了检测激光传感器模块的发射窗、比如如上所述的激光传感器模块40的发射窗56的污物的方法100的原理示意图。在步骤102中,使激光束48发射穿过发射窗56到达聚焦区域。在步骤104中,在预定时间周期t内改变激光束48的波长。在步骤106中,预定时间周期t期间确定干涉信号。在步骤108中,基于在预定时间周期确定的干涉信号,提供指示发射窗5的污物的污物检测信号。步骤108之后可以是基于污物检测信号校正测量的颗粒密度。替代地或附加地,步骤108之后可以是基于污物检测信号输出指示。
102.检测发射窗的污物的功能可以作为计算机程序存储在装置90的存储器96中。装置90或激光传感器模块可以在激光传感器模块40每次启动时执行污物检测、特别是在装置90的测量模式、例如用于颗粒检测的测量模式每次被激活时执行污物检测。也可以在执行测量期间、例如颗粒检测、速度测量等期间不时地激活污物检测。
103.虽然已经在附图和前述说明中详细说明和描述了本发明,但是这样的说明和说明被认为是说明性的或示例性的而不是限制性的;本发明不限于所公开的实施例。通过对附图、公开内容和所附权利要求的研究,本领域技术人员在实践要求保护的发明时可以理解和实现所公开的实施例的其他变型。
104.在权利要求中,“包括”一词不排除其他元件或步骤,单数形式不排除多个。单个元件或其他单元可以实现权利要求中记载的多个项目的功能。一些措施在互不相同的从属权
利要求中记载的这一事实并不意味着不能有利地使用这些措施的组合。
105.权利要求中的任何附图标记不应被解释为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。