技术特征:
1.一种用于借助于驱动系统(3)执行将开关(17)从当前开关状态(sj)切换到目标开关状态(sj k)的方法,其特征在于如下步骤:
‑
通过所述驱动系统(3)从控制设备(2)接收切换信号;
‑
通过反馈系统(4)的反馈信号来确定所述驱动系统(3)的驱动轴(16)的第一位置(pi)的至少一个值;
‑
通过所述控制设备(2)依据所述开关(17)的所要去往的目标开关状态(sj k)来确定所述驱动轴(16)的第二位置(ph)的值;
‑
通过所述控制设备(2)来确定所述驱动轴(16)的第一位置(pi)的值与所述驱动轴的第二位置(ph)的值之差;
‑
使所述控制设备(2)根据所述反馈信号来作用于电机(12),直至达到所述驱动轴(16)的第二位置(ph)的值。2.根据权利要求1所述的方法,其中,在确定在当前开关状态(sj)下所述驱动轴(16)的第一位置(pi)的所述至少一个值之后,将所述驱动轴(16)的第一位置(pi)的所述值与上一次去往的目标开关状态(sj)的驱动轴(16)的位置(ph)的值进行比较;如果当前开关状态(sj)的驱动轴(16)的第一位置(pi)的值与上一次去往的开关状态(sj)的驱动轴(16)的位置(ph)的值不一致,则所述控制设备(2)根据反馈信号来作用于所述电机(12),直至达到上一次去往的开关状态(sj)的驱动轴(16)的位置(ph)的值。3.根据上述权利要求中任一项所述的方法,其中,在确定所述驱动轴(16)的第一位置(pi)的值之后,通过反馈系统(4)的反馈信号来检查所述位置(pi)是否处在预先限定的容限范围内。4.根据权利要求3所述的方法,其中,如果驱动轴(16)的第一位置(pi)处在预先限定的容限范围内,则执行从当前开关状态(sj)到目标开关状态(sj k)的切换。5.根据上述权利要求中任一项所述的方法,其中,所述开关(17)从当前开关状态(sj)到目标开关状态(sj k)的切换被执行成,使得切换步长(k)具有值 1或
‑
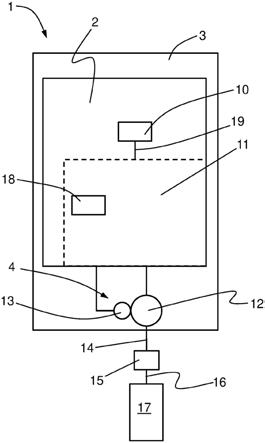
1。6.根据上述权利要求中任一项所述的方法,其中,利用编码器系统(13)来检测所述驱动轴(16)的位置(p1,p2,...,ph),所述编码器系统是所述反馈系统(4)的一部分,而且在此所述编码器系统(13)与所述驱动轴(16)直接或间接耦联。7.根据上述权利要求中任一项所述的方法,其中,在所述控制设备(2)的存储器(18)中,寄存所述开关(17)的开关状态(s1,s2,...,sn)与所述驱动轴(16)的位置(p1,p2,...,ph)的值的分配。8.一种用于开关(17)的用于执行从当前开关状态(sj)到目标开关状态(sj k)的切换的驱动系统(3),所述驱动系统包括:
‑
驱动轴(16),所述驱动轴将所述驱动系统(3)与所述开关(17)连接;电机(12),所述电机用于对所述驱动轴(16)进行驱动;和控制设备(2),所述控制设备产生针对所述驱动系统(3)的切换信号,其特征在于
‑
反馈系统(4),所述反馈系统在功能上被分配给所述驱动轴(16)并且与所述驱动系统(3)的功率部件(11)连接,其中,所述反馈系统(4)被设立为:确定所述驱动系统(3)的驱动
轴(16)的第一位置(pi)的值,并且基于所述位置来产生反馈信号;和
‑
所述控制设备(2)的控制单元(10),所述控制单元与所述功率部件(11)连接,所述控制单元被设立为:根据切换信号和反馈信号来运行所述电机(12),直至到达所述目标开关状态(sj k)。9.根据权利要求8所述的驱动系统(3),其中,所述控制设备(2)包括存储器(18);而且所述功率部件(11)用于对所述电机(12)供应能量;而且在所述存储器(18)中寄存有所述开关(17)的开关状态(s1,s2,...,sn)与所述驱动轴(16)的位置(p1,p2,...,ph)的值的分配。10.根据权利要求8至9中任一项所述的驱动系统(3),其中,所述反馈系统(4)包括编码器系统(13),所述编码器系统与所述驱动轴(16)直接或间接耦联。11.根据权利要求11所述的驱动系统(3),其中,所述编码器系统(13)是绝对值编码器、多圈绝对值编码器、单圈旋转编码器、虚拟旋转编码器或者具有至少一个辅助触点的虚拟旋转编码器。12.根据权利要求11所述的驱动系统(3),其中,所述编码器系统(13)是单圈旋转编码器或者具有至少一个辅助触点的虚拟旋转编码器。13.根据上述权利要求8至12中任一项所述的驱动系统(3),其中,电机轴(14)通过变速器(15)与用于所述开关(17)的驱动轴(16)连接。
技术总结
公开了一种用于执行开关(17)的切换的方法和一种用于开关(17)的用于执行切换的驱动系统(3)。将开关(17)从当前开关状态(SJ)切换到目标开关状态(SJ K)。利用反馈系统(4)来确定驱动系统(3)的驱动轴(16)的第一位置(PI)的第一值。此外,依据开关(17)的所要去往的目标开关状态(SJ K)来确定驱动轴(16)的第二位置(PH)的值。根据第一位置(PI)的值与第二位置(PH)的值之差,对电机(12)相对应地进行控制,直至达到驱动轴(16)的第二位置(PH)的值并且借此达到目标开关状态(SJ K)。借此达到目标开关状态(SJ K)。借此达到目标开关状态(SJ K)。
技术研发人员:S
受保护的技术使用者:赖茵豪森机械制造公司
技术研发日:2020.04.23
技术公布日:2021/12/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。