技术特征:
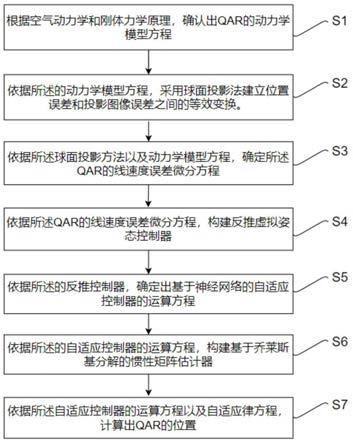
1.一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于,包括以下步骤:s1.根据空气动力学和刚体力学原理,确认出四旋翼飞行器(qar)的动力学模型方程;s2.依据所述的动力学模型方程,采用球面投影法建立位置误差和投影图像误差之间的等效变换;s3.依据所述球面投影方法以及动力学模型方程,确定所述qar的线速度误差微分方程;s4.依据所述qar的线速度误差微分方程,构建反推虚拟姿态控制器;s5.依据所述的反推控制器,确定出基于神经网络的自适应控制器的运算方程;s6.依据所述的自适应控制器的运算方程,构建基于乔莱斯基分解的惯性矩阵估计器;s7.依据所述自适应控制器的运算方程以及自适应律方程,计算出qar的位置。2.根据权利要求1所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:在步骤s1中,根据空气动力学和刚体力学原理,确定出qar的动力学方程:其中,r(θ)∈so3是机体坐标系与惯性坐标系之间的旋转矩阵;m(θ)是相机坐标系(与qar机身坐标系一致)和右手惯性坐标系之间的旋转速度的变换矩阵,公式如下:之间的旋转速度的变换矩阵,公式如下:是qar的姿态向量,θ,ψ分别是滚转角、俯仰角和偏航角,表示坐标系下qar质心的位置;代表线速度,表示在坐标系下的角速度,m(θ)为无人直升机姿态角度与角速度之间的转换矩阵,sk(
·
)表示斜对称矩阵,如对于sk(a)b=a
×
b;m是qar的质量;c
z
=(0,0,1)
t
;表示围绕其质心的qar常数惯性矩阵;是沿z方向的外生力;表示坐标系中的转动力矩,将qar电机提供的f和t作为自适应控制器的控制输入变量。3.根据权利要求2所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:
在步骤s2中,依据所述的动力学模型方程,采用球面投影法建立位置误差和投影图像误差之间的等效变换;球面投影法:用一个常量向量表示坐标系中第i个目标点的坐标,其中i=1,
…
,n,n为目标特征个数,由qar的动力学方程可得其中表示坐标系中第i个目标点对应的坐标;将目标特征投影到等效球面像面上,等效像平面的光学等效点s
i
满足如下公式:其中可测量向量f为所使用的针孔相机的焦距,(u
i
,v
i
,f)
t
是一种使用基本的图像检测技术可以测量的透视投影,即为可测量向量。r
i
(s
i
)=||s
i
||/f’是相对于单位焦距f’的相对深度;qar位置之间的关系如下公式上述公式是根据变换后的目标特征计算出s
i
的时间微分,接着根据非归一化球面质心(usc)建立图像投影与qar位置之间的关系再对所有目标点相对于时间t的usc微分;其视觉误差δs的时间微分公式如下:即位置跟踪控制问题已经转化为图像误差δs的稳定问题。4.根据权利要求3所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:在步骤s3中,依据所述球面投影方法以及动力学模型方程,确定所述qar的线速度误差微分方程;视觉误差δs的时间微分公式变为上式是使用平移速度v来稳定图像误差δs,实际线速度v和虚拟线速度v
*
之间的误差表示为其中k1是一个标量因子,虚拟控制速度v
*
设为v
*
=k1δs;随后需要稳定速度δv,使图像误差δs收敛到零,qar的动力学模型方程中的第4个子方程转换为如下公式:
其中c
z
是一个单位矢量,上述误差动力学是欠驱动的,这意味着仅使用推力在物理上是不可能直接稳定它的;这种误差系统可以看作是先前等研究的严格反馈非线性系统的扩展情况;为此,从这些理论工作中引入反推技术来解决一个工程问题,即欠驱动问题。5.根据权利要求4所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:在步骤s4中,依据所述qar的线速度误差微分方程,构建反推虚拟姿态控制器;基于lipschitz条件和反正切函数的自然饱和性质的反推虚拟姿态控制器:虚拟姿态控制器被定义为θ
*
=θ
‑
δθ,不失一般性,控制设计中将期望的偏航角选择为中间控制器θ
*
的设计为θ
*
=(φ
*
,θ
*
,ψ
*
)
t
,ψ
*
=0,θ
*
=arctan(k1k2δv1/g),且φ
*
=
‑
arctan(k1k2δv2/gcosθ
*
),进而将期望推力构造为t=m(
‑
gcosφ
*
cosθ
*
‑
k2δv3)可进一步转换为其中k2是一个标量因子。由于正切函数的自然饱和约束,虚控制器θ
*
和φ
*
必须被约束在(
‑
π/2,π/2)中,由此推断k2是一个对称正定矩阵;速度误差系统δv的稳定性主要取决于姿态误差δθ的收敛性,一旦满足条件θ
→
θ
*
,可以推导出r
t
(θ)
→
r
t
(θ
*
),从而进一步保证平移速度误差δv的收敛性,随后,主要工作集中于姿态误差系统的稳定δθ;根据qar的动力学模型方程中的第二子方程,得到如下公式:其中,δω=ω
‑
ω
*
表示实际角速度和虚角速度之间的差。描述为需要注意的是,在中,由于无法实时测量相对深度r
i
(s
i
),图像雅可比矩阵q(
·
)的准确值是未知的;组合非线性ξ1(θ,δv,s1,...,s
n
)也是未知的,因此它不能被虚角速度抵消。6.根据权利要求5所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:在步骤s5中,依据所述的反推控制器,确定出基于神经网络的自适应控制器的运算方程;采用rbfnn对不确定组合项ξ1(θ,δv,s1,
…
,s
n
),等于其中z1=(θ
t
,δ
t
v,s1,
…
,s
n
)
t
是神经网络的输入是一个理想化的权矩阵,是高斯径向基函数向量,其分量形式为指数形式,n1为隐藏的神经网络节点数,b1(z1)是可以充分减小到小于任何给定界的近似误差,即为了稳定姿态误差,中间控制器ω
*
可以构造为
其中a1和是两个可调参数,将已开发的中间控制器ω
*
代入可以得到其中,a1和是两个正向设计参数,式中是对定义为的理想常数w1的在线估计实际上,从上面的定义可以看出,w1与理想权矩阵φ1的最大奇异值的平方成正比;回顾传统的基于神经网络的自适应控制算法,通过对应的自适应矩阵直接估计理想的权值矩阵φ1,随着神经元数量的增加,将导致繁重的在线计算,给应用程序蒙上阴影,所述的优化自适应神经结构来消除这种计算负担,如上两式所示,代替权重矩阵本身,其最大奇异值的平方通过自适应调谐律来估计,使得仅剩下一个在线参数,这显著减轻了繁重的在线计算,姿态误差δθ的稳定性主要依赖于角速度误差δω为零,因此,接下来的任务是稳定角速度误差δω,首先,我们给出δω的变化率如下其中ξ2(z2)=ξ
21
ξ
22
是组合非线性函数,类似类似使用rbfnn来逼近不确定函数ξ2(z2),因此,我们有在这个近似器中,对于给定的常数此外,符号φ2和s2(z2)分别表示理想化的权重矩阵和高斯基函数向量,遵循w1的定义,与理想化权重矩阵φ2的最大奇异值的平方成比例的常数被定义为其中n2是神经网络节点的数量,此外,用表示其在线估计,转换为:7.根据权利要求6所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:在步骤s6中,依据所述的自适应控制器的运算方程,构建基于乔莱斯基分解的惯性矩阵估计器,新的基于乔莱斯基分解的惯性矩阵估计器:是辅助控制器如下:其中估计误差被定义为期望控制转矩随后被构造为a2和是两个设计参数,逆矩阵j
‑1可以分解为j
‑1=υυ
t
,其中υ是所有对角元素都是严格正的下三角矩阵,其逆矩阵用υ
‑1表示。将自适应控制扭矩f代入得到
其中a2和是两个正标量。惯性矩阵估计器在技术上设计为其中d和d0是两个正标量因子,γ是一个spd矩阵。8.根据权利要求7所述的一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,其特征在于:在步骤s7中,所述自适应控制器的运算方程以及自适应律方程,其公式如下:其中r
i
、k
0i
、h
i
和h
0i
(i=1,2)是一些正标量,k
0i
,h
0i
是修正参数,r
i
,h
i
是设计参数;自适应律方程:v
*
=k1δsθ
*
=(φ
*
,θ
*
,ψ
*
)
tt
技术总结
本发明公开了一种基于视觉反馈的四旋翼飞行器自适应神经网络定位控制方法,包括以下步骤:S1.根据空气动力学和刚体力学原理,确认出四旋翼飞行器(QAR)的动力学模型方程;S2.依据所述的动力学模型方程,采用球面投影法建立位置误差和投影图像误差之间的等效变换;S3.依据所述球面投影方法以及动力学模型方程,确定所述QAR的线速度误差微分方程;S4.依据所述QAR的线速度误差微分方程,构建反推虚拟姿态控制器;S5.依据所述的反推控制器,确定出基于神经网络的自适应控制器的运算方程;S6.依据所述的自适应控制器的运算方程,构建基于乔莱斯基分解的惯性矩阵估计器;S7.依据所述自适应控制器的运算方程以及自适应律方程,计算出QAR的位置,实现了QAR视觉位置跟踪控制。实现了QAR视觉位置跟踪控制。实现了QAR视觉位置跟踪控制。
技术研发人员:林创权 赖冠宇 刘治
受保护的技术使用者:广东工业大学
技术研发日:2021.08.11
技术公布日:2021/12/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。