1.本发明涉及一种用于用来施涂施涂剂的施涂设备、特别是用于用来涂装机动车辆车身部件的涂装设备的监测方法。此外,本发明包括相应地设计的施涂设备。
背景技术:
2.在用于涂装机动车辆车身部件的现代涂装设备中,操作由控制信号控制,其中许多传感器检测涂装设备的操作变量并生成原始传感器数据,使得可以通过评估原始传感器数据和控制信号来监测涂装设备的操作状态。然而,迄今为止用于监测涂装设备的操作的监测方法还不能完全令人满意。
3.de 10 2007 062 132 a1公开了一种用于用来施涂施涂剂的施涂设备、特别是用于用来涂装机动车辆车身部件的涂装设备的监测方法。在这里,确定原始传感器数据并记录控制信号并用于功能检查。
4.de 10 2018 214 170 a1公开了一种用于对技术系统进行质量评估的方法和装置,其中原始传感器数据(“图像数据”)和控制信号(“观察条件数据”)用作用于机器学习算法的数据基础。
5.公开文献de 10 2016 217 948 a1描述了一种用于预测粘附剂接头的质量的方法,其中,所述粘附剂接头由粘附剂加工装置施加,所述粘附剂加工装置特别具有用于施涂粘附剂的施涂装置。测量数据的分析是通过与数据模型进行比较来进行的。借助于多变量分析方法创建的统计数据模型由此可以通过机器学习进行优化。
技术实现要素:
6.因此,本发明基于创建改进的监测方法和相应的施涂设备的任务。
7.所述任务通过根据本发明的监测方法或通过据本发明的相应施涂设备来解决。
8.本发明基于这样的技术知识,即机器学习方法可以有利地用于监测施涂设备(例如涂装设备),例如从fayyad u.;patetsky
‑
shapiro,g.;smyth,p.:“from data mining to knowledge discovery in databases”,ai magazine,卷17,第3期(1996年)获知的那些。机器学习方法的另一个文献来源是bremer,m.:“principles of data mining”,springer
‑
verlag(2009)。
9.根据已知的监测方法,根据本发明的监测方法首先提供用于确定反映施涂设备的操作变量的第一原始传感器数据。例如,第一原始传感器数据可以反映作为操作变量的用于形成旋转雾化器的喷雾射流的成形空气的成形空气压力。然而,第一原始传感器数据也可以反映施涂设备的其它操作变量,如将在下面更详细地解释的。
10.此外,根据本发明的监测方法还根据已知的监测方法提供获取用于控制施涂设备的第一控制信号。例如,第一控制信号可以定义用于形成旋转雾化器的喷雾的成形空气流的目标值。然而,第一控制信号也可以用于设置施涂设备的其它操作变量,如将在下面更详细地解释的。
11.因此,控制信号与原始传感器数据一起形成在本发明的范围内被分析处理的信号集。例如,信号集可以考虑作为控制信号的成形空气流的设定值和作为原始传感器数据的成形空气压力的实际信号。然而,信号集也可以包括一个以上的实际信号和一个以上的控制信号。一般来说,信号集可以包括1...m个不同的控制信号和1...k个不同的实际信号,借此这些信号也可以属于不同的控制回路。
12.根据本发明的监测方法与现有技术的区别在于从第一原始传感器数据中提取所谓的特征,所述特征包括与第一原始传感器数据相比减少的数据量并且用作用于机器学习算法的数据基础。
13.在本发明的上下文中使用的术语“特征”首先具有通过特征提取减少数据量的含义,即与原始传感器数据相比,提取的特征具有减少的数据量。
14.此外,在本发明的上下文中使用的“特征”的概念具有从确切的操作过程中抽象出来的特征而不丢失与状态检测相关的信息的含义。例如,不再需要仅比较相同工件变量(例如车身变量)的完全相同的序列。相反,例如,在完全不同的汽车车身中比较类似的“刷子”就足够了。
15.此外,在本发明的上下文中使用的术语“特征”具有特征适合作为用于机器学习算法的数据基础的含义,其中已知的机器学习算法本身基于提取的特征。因此,这些特征在原始传感器数据与机器学习算法之间形成桥梁,这通常只能通过可以用有限资源掌握的机器学习算法来实现稳定的数据分析处理。
16.在本发明的一个优选实施例中,确定反映施涂设备的不同操作变量的第一和第二原始传感器数据,并且从第一原始传感器数据和第二原始传感器数据两者中提取特征,然后可以用作用于机器学习算法的数据库。例如,第一原始传感器数据可以将成形空气流表示为操作变量,而第二原始传感器数据可以表示旋转雾化器的驱动器涡轮机的速度。然而,第一和第二原始传感器数据也可以反映施涂设备的其它操作变量,如下面将更详细地描述的。
17.优选地,分别从第一和第二原始传感器数据中提取特征如下地执行。
18.在一个步骤中,首先定义观察时段窗口,在所述观察时段窗口内待分析处理第一或第二原始传感器数据。例如,观察时段窗口可以是汽车车身周期,即在将待涂装的机动车辆车身送入涂装间与下一个机动车辆车身送入涂装间之间的时段。这具有在正常生产期间可以进行状态和监测的优点。然而,关于观察窗口,在本发明的范围内存在各种可能性,这将在下面详细描述。
19.在进一步的步骤中,然后将观察时段窗口分为单独的区段,即所谓的比较时段。这样,可以通过控制信号的变化(跳跃)来定义比较时段。例如,每次在一个车身周期内改变与施涂相关的控制信号时,就开始一个新的比较时段。例如,可以为此分析处理旋转雾化器的成形空气流的设定值。然而,在本发明的范围内,也可以分析处理各种其它控制信号以确定比较时段,如将详细描述的。
20.在进一步的步骤中,然后将比较时段本身细分为多个相继的子区段,所述细分由参数预先确定。
21.例如,比较时段可以分为0...n个初始调节阶段、0...m个后续经调节阶段和0...l个后续余留阶段作为子区段。
22.调节阶段处于比较时段内的初始时间阶段,其中第一和/或第二原始传感器数据对第一和/或第二控制信号的跳跃作出反应,从而还不能说是静止状态。
23.经调节阶段处于调节阶段之后的时段,其中第一和/或第二原始传感器数据至少部分地对控制信号跳跃作出反应。
24.为了避免误解,应该指出的是,所述方法本身并不检查在调节阶段或在经调节阶段中的原始传感器数据是否有振荡。相反,调节阶段和经调节阶段的细分由参数固定,即由调节阶段的预定义的持续时间和经调节阶段的同样预定义的持续时间固定。
25.另一方面,余留阶段是调节阶段和经调节阶段之后直到比较时段结束的剩余时段。在这种情况下,比较时段可能包含单个余留阶段或根本没有余留阶段。例如,如果调节阶段和经调节阶段的总和正好等于比较时段的持续时间,则比较时段不包含任何余留阶段。
26.在这里应该注意的是,在比较时段足够长从而除了调节阶段之外还包括经调节阶段和余留阶段的情况下,经调节阶段和余留阶段是可选的。然而,如果比较时段比较短,则比较时段可以仅分为调节阶段和余留阶段。如果比较时段很短,甚至有可能比较时段只包含一个调节阶段而根本没有经调节阶段。
27.在进一步的步骤中,然后为第一和/或第二原始传感器数据的各个子区段计算至少一个统计参数,并且如果需要,为各个子区段内的另外的原始传感器数据计算至少一个统计参数,所计算的统计参数是提取的特征的组成部分。
28.上面已经简要提到,比较时段可能会受到控制信号的跳跃或变化的限制,即控制信号的一个变化开始比较时段,控制信号的下一个变化结束当前比较时段并开始下一个比较时段。
29.在本发明的一个变体中,比较时段受同一控制信号的变化(跳跃)的限制。在这种情况下,当确定比较时段时仅分析处理一个控制信号,例如旋转雾化器的成形空气流的设定值。另一方面,在本发明的该变体中,其它控制信号的可能跳跃不用于确定比较时段。
30.另一方面,在另一个发明变体中,使用多个控制信号来定义比较时段。在这里,比较时段也受到控制信号的变化或跳跃的限制。然而,不同类型的控制信号被分析处理。例如,一个控制信号的跳跃可以标记比较时段的开始,而另一个控制信号的跳跃则标记当前比较时段的结束和下一个比较时段的开始。
31.上面已经简要提到,在比较时段的各个子区段中确定的统计特征是提取的特征的组成部分。然而,在本发明的范围内,提取的特征还可以包含进一步的信息。例如,这些特征可以包括控制信号中的设定值变化量和自上次变化以来的时间段,仅举几个示例。
32.此外,上面已经提到,比较时段被细分为子区段,即例如0...n个调节阶段、0...m个经调节阶段和0...1个余留阶段。在这一点上再次指出,比较时段不必包含多个调节阶段和多个经调节阶段。例如,比较时段也可能只包含一个调节阶段。在这里可以根据原始传感器数据的时间常数来确定子区段的数量和子区段的持续时间。为此,确定第一和/或第二原始传感器数据的时间常数,然后根据确定的时间常数来确定比较时段中的子区段的数量、单个调节阶段的持续时间和/或单个经调节阶段的持续时间。每个用例仅选择一个时间常数,其中还可能包含多个控制和传感器数据。
33.然而,替代性地也可以随机确定各个调节阶段和/或各个经调节阶段的持续时间。
34.上面已经提到,观察时段窗口可以是例如车身周期。这是与待涂覆的部件、即特别是与待涂装的机动车辆车身部件有关的部件相关的时间段。然而,观察时段窗口也可以替代性地是另一个与部件相关的时间段,例如,准备施涂设备以用于待涂覆的部件的后续涂覆所需的时间段。
35.此外,在本发明的范围内,观察时段窗口可以是与施涂设备相关的时间段,例如设置操作、测试操作、手动操作或维护操作的时间段。
36.此外,观察时段窗口也可以是与时间相关的时间段,例如一小时、一天、一周、一个月、一个季度或一年。作为观察时段窗口的与时间相关的时段的另一个示例是工作班次的班次长度。
37.上面已经提到,在各个子区段中确定统计参数,然后所述统计参数是提取的特征的组成部分。
38.在本发明的一个变体中,所述统计参数是仅考虑一种类型的原始传感器数据的单变量参数。这种单变量统计参数的示例是子区段内的算术或几何平均值、中值、方差、最大值或最小值,其中单变量统计参数始终与同一原始传感器数据相关,即与单个操作变量相关。
39.在本发明的另一个变体中,统计参数是从不同的原始传感器数据计算的多变量统计参数。这种多变量统计参数的示例是pearson相关系数和秩相关系数。然而,多变量统计参数也可能考虑信号集的三个或更多个不同的原始传感器数据。
40.此外,应当注意,本发明不限于待分析处理的原始传感器数据。相反,在本发明的范围内,可以分析处理在施涂设备的操作期间生成的各种各样的原始传感器数据。以下原始传感器数据可以作为示例提到:
41.‑
旋转雾化器的涡轮机的速度,
42.‑
用于驱动旋转雾化器的涡轮机的驱动空气的空气压力,
43.‑
涂料压力调节器处的涂覆剂压力,
44.‑
静电涂覆剂充填系统的充填电流,
45.‑
静电涂覆剂充填系统的充填电压,
46.‑
涂覆间中的湿度,
47.‑
用于形成涂覆剂喷雾的成形空气的空气压力,
48.‑
用于形成涂覆剂喷雾的成形空气的流动速率,
49.‑
涂覆间中的空气温度,
50.‑
施涂装置的涂料撞击点的位置,
51.‑
施涂装置的涂料撞击点的运动速度,
52.‑
阀、特别是涂覆剂阀、冲洗剂阀、脉冲空气阀或润滑剂阀的阀位置,
53.‑
驱动器的驱动变量、特别是机器人驱动器的驱动变量,特别是位置、速度、加速度、电流、电压、功率或温度,
54.‑
涂覆剂泵或配量单元的流率,
55.‑
将待涂覆的部件输送通过施涂器的线性输送器的位置,
56.‑
物料的流率、温度和压力,
57.‑
旋流施涂器的速度。
58.上面已经提到,作为根据本发明的监测过程的一部分,可以分析处理各种原始传感器数据。在对不同原始传感器数据的这种监测中,原始传感器数据的上述示例的任何组合都是可能的。例如,旋转雾化器的涡轮机的旋转速度可以与涂覆剂的流率一起分析处理,仅举一个示例。此外,在本发明的范围内还可以对多于两种不同类型的原始传感器数据进行分析处理,其中原始传感器数据的上述示例的任意组合是可能的。
59.例如,原始传感器数据可以反映施涂设备的以下部件中的一个的操作变量:
60.‑
电机,
61.‑
涂覆机器人的机器人接头,
62.‑
涂覆机器人的机器人驱动器的驱动器控制器,
63.‑
用于驱动旋转雾化器的涡轮机,
64.‑
用于通过成形雾化器的喷雾来控制成形空气的流动的成形空气控制器,
65.‑
泵、特别是涂覆剂泵,
66.‑
用于计量涂覆剂的计量装置,
67.‑
阀、特别是比例阀,
68.‑
涂料压力调节器,
69.‑
用于静电涂覆剂拾取的高压发生器,
70.‑
开关,
71.‑
传感器,
72.‑
加热器,
73.‑
控制系统,
74.‑
电保险丝,
75.‑
电池,
76.‑
不间断的电源,
77.‑
不间断的信号传输,
78.‑
变压器,
79.‑
用于运输流体、特别是涂覆剂、浓稠材料、粘附剂、稀释剂、空气或水的流体管线、特别是软管或管道,
80.‑
旋流施涂器。
81.关于原始传感器数据的提供,在本发明的范围内存在各种可能性。例如,可以连续测量原始传感器数据,然后进行分析处理。替代性地,原始传感器数据可以从数据库中读出,前提是原始传感器数据是较早的时间延迟测量的。
82.上面提到,从原始传感器数据中提取的特征用作用于机器学习算法的数据库。这些机器学习算法通常使用应用于特征的所谓的规则,并允许推断设备的操作状态。要创建此规则,可以使用较早测量和存储的历史原始传感器数据,其中所谓的标签反映了在测量历史原始传感器数据期间施涂设备的操作状态(例如,无故障或有故障)。然后以上述方式从历史原始传感器数据中提取特征。随后,借助于机器学习算法从历史原始传感器数据中提取的特征和从已知的标签中提取的特征来确定规则。以这种方式确定的规则随后可以应用于从当前测量的原始传感器数据中提取的特征。
83.例如,可以使用对从当前测量的原始传感器数据中提取的特征的分析处理来识别
施涂设备的操作状态。例如,可以检测以下情况中的一个:
84.‑
涂料压力控制器的磨损或缺陷,
85.‑
将涂覆剂的多种成分相互混合的混合器的磨损或缺陷,
86.‑
泵、特别是涂覆剂泵的磨损或缺陷,
87.‑
阀、特别是用于控制涂料、浓稠物质、粘附剂、稀释剂、空气或水的阀的磨损或缺陷,
88.‑
加热器的磨损或缺陷,
89.‑
驱动器电机的磨损或缺陷,
90.‑
电接触缺陷,
91.‑
检测涂料中的气泡或涂料供应的中断,
92.‑
施涂设备的操作介质的特性、特别是空气、水、清漆、粘附剂或浓稠物质的特性,
93.‑
分析处理机器部件或设备上的应力的施加和运动程序,
94.‑
检测旋转雾化器的旋杯的喷射,
95.‑
检测雾化器上的污染和/或湿气,
96.‑
检测电机、泵、活塞、成形空气、风扇、涡轮机、高压、压力流量调节器的操作行为中的异常,
97.‑
总体检测信号曲线与正常曲线的显著偏差的意义上的异常,
98.‑
预测维护间隔。
99.此外,应该提到的是,在本发明的上下文中使用的术语施涂设备应以一般术语来理解并且尤其包括用于涂装机动车辆车身部件的涂装设备。然而,本发明也可以用于例如用于结合、密封或绝缘的系统中。因此,在本发明的上下文中使用的施涂剂的概念应以一般术语来理解并且尤其包括涂料和浓稠材料、例如粘附剂或绝缘材料。
100.此外,应该提到的是,本发明不仅要求保护上述根据本发明的监测方法。相反,本发明还要求保护相应的施涂设备,所述施涂设备包括施涂器(例如,旋转雾化器)、机械手(例如,多轴涂装机器人)、用于测量原始传感器数据的传感器以及控制施涂设备的控制装置。根据本发明的施涂设备的特征在于控制装置执行根据本发明的上述监测方法。
101.在这里应该提到的是,在这个意义上的控制装置可以分布在多个硬件部件上。还应该提到的是,它不一定是施涂设备控制。监测可以在与施涂设备控制完全无关的完全不同的硬件上运行。
附图说明
102.本发明的其它有利的进一步实施例在从属权利要求中指出或在下面参考附图连同本发明的优选实施例的描述一起更详细地解释。附图示出:
103.图1是根据本发明的用于监测施涂设备的系统结构的示意性表示,
104.图2是分析软件的结构的示意性图示,
105.图3是用于特征提取的分析软件的操作模式的示意性图示,
106.图4是说明根据本发明的监测方法的流程图,
107.图5是说明特征提取的时序图,
108.图6是说明根据本发明的监测方法的流程图,以及
109.图7是说明考虑多个控制信号和多个原始传感器数据的特征提取的时间图。
具体实施方式
110.图1示出了根据本发明的系统的系统结构,所述系统具有:机器1、具有嵌入式分析软件3的控制器2、具有分析软件5的分析硬件4、可视化装置6和属于外部系统的硬件7。
111.在本实施例中,机器1是用于涂装机动车辆车身部件及其所有部件的涂装设备。
112.在这里,控制器2向机器1输出控制信号并从机器1接收原始传感器数据,并且原始传感器数据可以由分析软件3进行分析。
113.此外,原始传感器数据也可以通过分析硬件4的分析软件5来分析处理。
114.图2示出了分析软件3或5的模块化结构的示意性表示。
115.因此,分析软件3可以访问数据存储器8和网关9,以便与诸如机器1或硬件7的其它部件通信。
116.此外,分析软件3包括特征提取模块10、规则生成模块11和规则应用模块12。
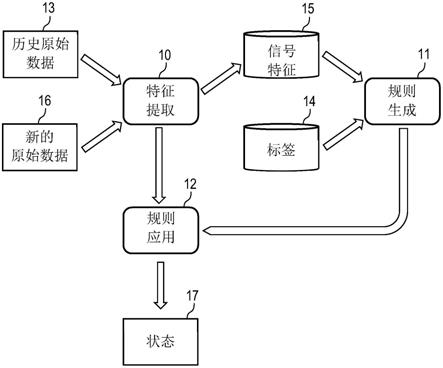
117.图3示出了说明根据本发明的监测方法的示意图。
118.首先,特征提取模块10从先前在机器1的已知操作状态下测量的历史原始数据13中提取特征,其中机器1的已知操作状态由标签14表示。然后,特征提取模块10从历史原始传感器数据13中提取特征15,如将详细描述的。模块10的特征提取具有减少历史原始传感器数据13的数据量的任务,使得随后的机器学习算法可以基于特征15。
119.然后,模块11使用提取的特征15和已知的标签14来创建规则,这些规则随后用于稍后分析处理当前测量的原始数据16。
120.在正常的操作过程中,模块10然后再次从当前测量的新的原始传感器数据16中提取特征,并且模块12将先前确定的规则应用于提取的特征以确定机器1的状态17。
121.在下面,现在将参考根据图5的时序图来描述根据图4的流程图。
122.在第一步骤s1中,控制施涂设备,借此记录原始信号,即记录由传感器测量并表示施涂设备的操作变量的用于控制施涂设备的控制信号和实际信号(原始传感器数据)。
123.然后在步骤s2中存储原始信号(控制信号和实际信号)。
124.在步骤s3中,然后检索各个应用情况的先前定义的参数。一方面,这包括观察时段窗口[t
a
,t
e
],例如其可以是汽车车身周期。另一方面,检索到的参数还定义了期望的信号集的选择,即待分析处理的控制信号和实际信号。最后,检索到的参数还包括用于将比较时段[t1,t2]分为子区段的参数,例如调节阶段d
dyn
的数量n、调节阶段d
dyn
的持续时间和经调节阶段d
stat
的持续时间。在减去调节阶段d
dyn
之后,静态经调节阶段d
stat
的数量仍然适合比较时段。
[0125]
在步骤s4中,然后检索先前存储的原始信号(控制信号和实际信号)的数据,特别对于在步骤s3中确定的观察时段窗口[t
a
,t
e
]和信号集。
[0126]
在步骤s5中,然后确定所考虑的控制信号的变化,在此这些变化在根据图5的时间图中在时间t1和t2发生。
[0127]
随后,在步骤s6中,确定至少一个比较时段[t1,t2],该比较时段从时间t1处控制信号的变化开始,到时间t2处控制信号的下一次变化结束。通常,会考虑多个比较时段。
[0128]
在步骤s7中,然后根据在步骤s3中检索到的参数将该比较时段[t1,t2]分为子区
段。根据比较时段[t1,t2]的持续时间、调节阶段d
dyn
的持续时间和经调节阶段d
stat
的持续时间,比较时段[t1,t2]然后分为0...n个调节阶段d
dyn
、0...m个经调节阶段d
stat
和0...1个余留阶段。在根据图5的时间图中,比较时段[t1,t2]由三个调节阶段d
dyn
和两个经调节阶段d
stat
组成。然而,这只是一个示例,即比较时段[t1,t2]也可以以不同的方式由子区段组成。
[0129]
在步骤s8中,为单独的区段中的每一个确定原始传感器数据的单变量统计特征,即由传感器测量并表示施涂设备的操作变量的实际信号。根据图5的时间图具体示出了旋转雾化器的成形空气流被测量为实际信号。然而,根据在步骤s3中检索到的信号集,也可以使用其它实际信号来计算统计参数。例如,单变量统计参数可以是算术平均值,仅举一个示例。
[0130]
在步骤s9中,然后确定特征,其中在步骤s8中计算的单变量统计特征是这些特征的组成部分。特征的其它组成部分是目标值和目标值的变化。
[0131]
在步骤s10中,然后使用特征来确定施涂设备的状态,这可以以简单(手动参数化)规则或机器学习算法来完成。
[0132]
图6示出了流程图,除了在步骤s1中测量原始传感器数据和在步骤s2中提取特征之外,还示出了在步骤s3中将规则应用于提取的特征。
[0133]
图7示出了根据图5的时间图的修改,其中示出了两个控制信号和两个实际信号。比较时段受两个控制信号的跳跃的限制。
[0134]
第一比较时段位于时间t1与t2之间。第二比较时段位于时间t2与t3之间。
[0135]
然后,可以以上述方式再次将上述比较时段分为子区段。
[0136]
此外,对于各个子区段再次计算统计参数,尽管这些参数也可以是例如从两个实际信号计算的多变量参数。这种多变量统计参数的一个示例是pearson相关系数。
[0137]
本发明不限于上述优选实施例。相反,大量的变体和变型也是可能的,它们也利用了本发明的概念并因此落入保护范围内。特别地,本发明还要求保护独立于在每种情况下所引用的权利要求的从属权利要求的主题和特征,并且特别地也没有独立权利要求的特征。因此,本发明包括彼此独立地享有保护的本发明的不同方面。
[0138]
附图标记列表
[0139]1ꢀꢀꢀꢀꢀꢀꢀꢀ
机器
[0140]2ꢀꢀꢀꢀꢀꢀꢀꢀ
控制器
[0141]3ꢀꢀꢀꢀꢀꢀꢀꢀ
分析软件
[0142]4ꢀꢀꢀꢀꢀꢀꢀꢀ
分析硬件
[0143]5ꢀꢀꢀꢀꢀꢀꢀꢀ
分析软件
[0144]6ꢀꢀꢀꢀꢀꢀꢀꢀ
可视化装置
[0145]7ꢀꢀꢀꢀꢀꢀꢀꢀ
硬件
[0146]8ꢀꢀꢀꢀꢀꢀꢀꢀ
数据存储器
[0147]9ꢀꢀꢀꢀꢀꢀꢀꢀ
网关
[0148]
10
ꢀꢀꢀꢀꢀꢀꢀ
特征提取模块
[0149]
11
ꢀꢀꢀꢀꢀꢀꢀ
规则创建模块
[0150]
12
ꢀꢀꢀꢀꢀꢀꢀ
规则应用模块
[0151]
13
ꢀꢀꢀꢀꢀꢀꢀ
历史原始数据
[0152]
14
ꢀꢀꢀꢀꢀꢀꢀ
标签
[0153]
15
ꢀꢀꢀꢀꢀꢀꢀ
特征
[0154]
16
ꢀꢀꢀꢀꢀꢀꢀ
新的原始数据
[0155]
17
ꢀꢀꢀꢀꢀꢀꢀ
机器的状态
[0156]
d
dyn
ꢀꢀꢀꢀꢀꢀ
调节阶段
[0157]
d
stat
ꢀꢀꢀꢀꢀ
经调节阶段
[0158]
[t
a
,t
e
] 观测时间窗口
[0159]
[t1,t2] 比较时段
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。