1.本实用新型涉及一种物流分拣机器人,尤其涉及一种便于拆装的物流分拣机器人。
背景技术:
2.物流分拣机器人用于对快递进行分拣,分拣机器人为机械手,是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣,通过机械手臂与抓取头的配合,将快递一个地点转移至另一地点。现有的分拣机器人通过调节螺栓安装在安装座上,安装座固定在地面上,实现对分拣机器人的固定。
3.现有技术中,目前常见的物流分拣机器人在使用时,物流仓库需安装多个的分拣机器人,分拣机器人通过多个调节螺栓固定在安装座上,需将分拣机器人底座上的调节螺栓孔对正安装座的螺纹孔,将调节螺栓穿过调节螺栓孔后拧入螺纹孔中,将分拣机器人固定住,拆卸时,需将多个调节螺栓拆下才可将分拣机器人拆下,拆装操作繁琐,从而导致分拣机器人的拆装较为麻烦。
技术实现要素:
4.为了克服现有技术的不足,本实用新型的目的在于提供一种便于拆装的物流分拣机器人,具备拆装方便的优点,以解决现有技术中的物流分拣机器人的拆装操作繁琐,从而导致分拣机器人拆装较为麻烦的问题。
5.本实用新型的目的采用如下技术方案实现:
6.一种便于拆装的物流分拣机器人,包括机器人主体、底座、安装座、限位块和调节组件,所述底座与机器人主体连接,所述底座上设有连接块,所述安装座上开设有连接槽,所述连接块嵌设于连接槽中,所述连接块上开设有限位槽,所述限位块的一端活动安装在安装座上,所述限位块的另一端进入限位槽中并能与所述限位槽卡接,所述调节组件用于使所述限位块从一个位置移动到另一个位置,从而能够限制所述限位块脱离限位槽。
7.进一步地,所述调节组件包括内螺纹管、调节螺栓、滑块和弹簧,所述安装座的侧壁上开设有活动开口,所述活动开口与连接槽连通,所述内螺纹管的内腔与活动开口连通,所述调节螺栓穿过内螺纹管的内腔、活动开口,且所述调节螺栓与内螺纹管螺纹连接,所述滑块与限位块连接,所述滑块安装在活动开口中并用于与调节螺栓抵接,所述弹簧的一端固定在滑块上,所述弹簧的另一端固定在安装座的内壁上。
8.进一步地,所述调节螺栓上设有压盘,所述滑块上开设有用于供压盘进入的豁口。
9.进一步地,所述调节组件还包括导向杆,所述安装座上还开设有导向槽,所述导向槽与活动开口连通,所述导向杆位于导向槽中,所述导向杆与滑块连接且所述弹簧套装在导向杆上。
10.进一步地,所述调节组件还包括螺杆和螺帽,所述安装座的底部开设有通槽,所述螺杆穿过通槽并与所述滑块连接,所述螺杆穿过所述螺帽的中心孔并与螺帽螺纹连接。
11.进一步地,所述限位块的形状为l形。
12.进一步地,所述限位块的数量为两个。
13.进一步地,所述安装座和所述底座两者中的一个设有凸块,这两者中的另一个设有凹槽,所述凸块与凹槽卡接。
14.相比现有技术,本实用新型的有益效果在于:
15.(1)该便于拆装的物流分拣机器人,通过设置连接块、限位块、螺栓和螺杆,在使用时,将底座的连接块放入安装座的连接槽中,转动螺栓使限位块与限位槽紧密贴合,将连接块卡住,再将螺帽拧在螺杆上,将螺帽拧紧,即可将底座固定住,从而将机器人主体固定住,拆卸时,将螺帽拧松,再反向转动螺栓使螺栓不在挤压滑块,限位块即可在弹簧弹力作用下不在卡在限位槽中,向上移动底座即可将机器人主体拆下,拆装方式简便,达到了拆装更加方便的效果,以解决现有技术中拆装分拣机器人时的操作繁琐,从而导致分拣机器人拆装较为麻烦的问题。
16.(2)该便于拆装的物流分拣机器人,通过设置凸块和凹槽,在使用时,连接块卡在连接槽中后,凸块的表面与凹槽的内壁紧密贴合,提高安装座与底座的连接紧密性。
附图说明
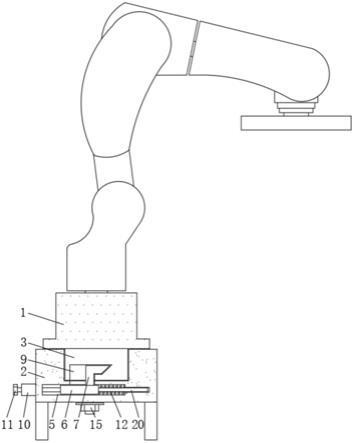
17.图1为本实用新型实施例中便于拆装的物流分拣机器人的结构示意图;
18.图2为图1的局部结构示意图;
19.图3为图2的剖视结构示意图;
20.图4为图2的另一种角度的剖视结构示意图;
21.图中:1、底座;2、安装座;3、连接块;4、连接槽;5、活动开口;6、滑块;7、限位块;8、滑槽;9、限位槽;10、内螺纹管;11、调节螺栓;12、弹簧;13、螺杆;14、通槽;15、螺帽;16、凸块;17、凹槽;18、豁口;19、压盘;20、导向杆;21、导向槽。
具体实施方式
22.下面,结合附图以及具体实施方式,对本实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
23.请参阅图1
‑
4,本实用新型实施例公开了一种便于拆装的物流分拣机器人,包括机器人主体、底座1、安装座2、限位块7和调节组件,其中,调节组件包括内螺纹管10、调节螺栓11、滑块6、弹簧12、导向杆20、螺杆13和螺帽15。
24.作为优选的实施方式,底座1与机器人主体连接,底座1的底部固定连接有连接块3,安装座2的顶部开设有连接槽4,连接槽4用于对连接块3进行定位,连接块3的表面与连接槽4的内壁活动连接,安装座2的内部开设有活动开口5,活动开口5为滑块6的移动提供空间,活动开口5位于连接槽4的下方,活动开口5的内壁与滑块6的表面活动连接,滑块6的上表面固定连接有限位块7,限位块7的正剖图呈l形,活动开口5内壁的顶部开设有滑槽8,滑槽8为限位块7的移动提供空间,滑槽8的内壁与限位块7的表面活动连接,连接块3的底部开设有限位槽9,限位块7的表面与限位槽9的内壁活动连接,安装座2的侧面固定连接有内螺纹管10,内螺纹管10的内壁与调节螺栓11的表面螺纹连接,调节螺栓11靠近滑块6的一端贯
穿安装座2并与滑块6的侧面活动连接,滑块6表面远离调节螺栓11的一侧固定连接有弹簧12,当调节螺栓11不在挤压滑块6后,弹簧12的弹力通过滑块6带动限位块7不在与限位槽9紧密贴合,即可将连接块3拆下,弹簧12远离滑块6的一端与活动开口5内壁远离内螺纹管10的一侧固定连接,滑块6的下表面固定连接有螺杆13,活动开口5内壁的底部开设有通槽14,通槽14的内壁与螺杆13的表面活动连接,螺杆13的表面与螺帽15的内壁螺纹连接,螺帽15的顶部与安装座2的底部活动连接。
25.在本实施例中,连接块3的形状优选为方形。限位块7的数量优选为两个。
26.作为优选的实施方式,底座1的顶部固定连接有凸块16,安装座2的顶部开设有凹槽17,凸块16的表面与凹槽17的内壁活动连接。
27.本实施方案中,连接块3与连接槽4的内壁贴合后,凸块16的表面与凹槽17的内壁贴合,提高底座1与安装座2的连接紧密性。
28.作为优选的实施方式,凸块16呈等腰梯形,凹槽17的形状与凸块16的形状相适配。
29.本实施方案中,凸块16的正剖图呈等腰梯形,增加凸块16与凹槽17的接触面积,提高底座1与安装座2的连接紧密性。
30.作为优选的实施方式,限位块7表面远离内螺纹管10的一侧为斜面,限位槽9的内壁与限位块7的表面活动连接。
31.本实施方案中,限位块7的斜面挤压限位槽9内壁的斜面,使连接块3与连接槽4的内壁紧密贴合,将连接块3固定住。
32.作为优选的实施方式,滑块6表面靠近内螺纹管10的一侧开设有豁口18,调节螺栓11靠近滑块6的一侧固定连接有压盘19,压盘19的表面与豁口18的内壁活动连接。
33.本实施方案中,转动调节螺栓11时调节螺栓11带动压盘19挤压豁口18内壁的右侧,使滑块6带动限位块7与限位槽9内壁紧密贴合,从而将连接块3固定住。
34.作为优选的实施方式,滑块6远离内螺纹管10的一侧固定连接有导向杆20,活动开口5内壁远离内螺纹管10的一侧开设有导向槽21,导向杆20的表面与导向槽21的内壁活动连接,弹簧12活动套接在导向杆20的表面。
35.本实施方案中,滑块6在移动时带动导向杆20沿着导向槽21的镍币运动,导向杆20对滑块6起到导向作用,使滑块6始终处于水平运动状态。
36.在使用时,将底座1的连接块3放入安装座2的连接槽4中,转动调节螺栓11,调节螺栓11转动并带动压盘19向右运动,压盘19挤压豁口18内壁的右侧使滑块6沿着活动开口5的内壁向右运动,滑块6带动限位块7和螺杆13向右运动,限位块7与限位槽9紧密贴合使限位块7的斜面挤压限位槽9内壁的斜面,使连接块3处于向下运动状态,使连接块3与连接槽4紧密贴合,将连接块3卡住,再将螺帽15拧在螺杆13上,将螺帽15拧紧,螺帽15的顶部与安装座2的底部紧密贴合,即可将底座1固定住,从而将机器人主体固定住。
37.拆卸时,将螺帽15拧松,使螺帽15与安装座2分离,再反向转动调节螺栓11使调节螺栓11不在带动压盘19挤压滑块6,滑块6在弹簧12弹力作用下沿着活动开口5的内壁向左移动,滑块6带动限位块7不在卡在限位槽9中,当压盘19与活动开口5内壁的左侧贴合后,无法继续反向转动调节螺栓11,此时限位块7不在卡在限位槽9中,向上移动底座1即可将机器人主体拆下,拆装方式简便,安装方便,提高机器人主体的安装效率,拆卸方便,方便对机器人主体进行维修。
38.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。