桌面机械臂的驱动结构、桌面机械臂和机器人
1.本发明为2020年11月11号申请的申请号为“202011259842.0”,发明创造名称为“桌面机械臂的驱动结构、桌面机械臂和机器人”的分案申请。
技术领域
2.本发明涉及桌面机械臂技术领域,特别涉及一种桌面机械臂的驱动结构、桌面机械臂和机器人。
背景技术:
3.桌面机械臂作为机械臂的一个细分品类,由底座、转台、大臂、小臂、末端以及转台驱动电机、大臂驱动电机、小臂驱动电机构成,转台与底座可旋转的连接,大臂分别与转台和小臂连接,小臂与末端连接,末端用于设置执行器,转台驱动电机用于驱动转台相对于底座转动,大臂驱动电机用于驱动大臂运动,小臂驱动电机用于驱动小臂运动,大臂与小臂利用平行四边形原理以可驱动末端在工作空间内运动。例如申请号为cn201620105515.2的中国专利所公开的机械臂及机器人。
4.目前,桌面机械臂通常为教育型桌面机械臂,其末端所抓取的重量较轻,负载较小,对于控制精度以及驱动动力要求不高,桌面机械臂的转台驱动电机、大臂驱动电机和小臂驱动电机通常采用步进电机;然而,随着工业水平的提高,为适应市场需求,桌面机械臂逐渐朝向工业级应用发展,如应用至视觉分拣、流水线搬运等领域,其被要求抓取更重的物体,负载变大,所以桌面机械臂的转台驱动电机、大臂驱动电机和小臂驱动电机采用步进电机,其虽具有体积小、成本低的优点,但却不能够适应工业级的应用。
技术实现要素:
5.本发明的主要目的是提出一种桌面机械臂驱动结构,旨在解决上述背景技术中的技术问题。
6.为实现上述目的,本发明提出一种桌面机械臂驱动结构,该桌面机械臂驱动结构包括底座、转台和执行电机;
7.所述底座中设有转台驱动电机以及转台驱动轴,所述转台驱动电机与所述转台驱动轴传动连接,所述转台驱动轴与所述转台传动连接,所述转台上设有大臂驱动电机和小臂驱动电机,所述转台驱动电机、所述大臂驱动电机和所述小臂驱动电机均为包括绝对值编码器的伺服电机;
8.所述执行电机设置于末端。
9.其中,所述转台驱动轴设置于所述底座的中心区域,所述转台驱动电机错位设置于所述转台驱动轴周围;所述转台包括基座,所述大臂驱动电机与所述小臂驱动电机设置于所述基座的后侧。
10.其中,还包括:转台减速组件,所述转台驱动电机通过所述转台减速组件与所述转台驱动轴传动连接;大臂减速组件,所述大臂减速组件与所述大臂驱动电机传动连接;小臂
减速组件,所述小臂减速组件与所述小臂驱动电机传动连接。
11.其中,所述转台减速组件包括转台一级同步带轮和转台二级同步带轮;所述转台一级同步带轮的一端与所述转台驱动电机传动连接,另一端与所述转台二级同步带轮的一端传动连接,所述转台二级同步带轮的另一端与所述转台驱动轴传动连接。
12.其中,所述底座内构造有在水平方向上延展的隔板,所述转台一级同步带轮设置在所述隔板顶面上,所述转台驱动电机设置于所述隔板底面之下,所述转台驱动电机的输出轴穿出所述隔板与所述转台一级同步带轮的一端传动连接,所述转台二级同步带轮设置在所述隔板底面上。
13.其中,所述转台驱动轴通过推力轴承设置在所述隔板上。
14.其中,所述隔板上构造容纳腔,所述容纳腔构造有与所述推力轴承的外环下缘相适配的承接结构,所述推力轴承设置于所述容纳腔之内,且所述推力轴承的外环下缘与所述承接结构相接,所述转台驱动轴在竖直方向上自上而下的插入所述推力轴承的内环设置,所述转台驱动轴构造有承载段、插装段和连接段,所述承载段与所述推力轴承的内环上缘抵接,所述插装段与所述推力轴承的内环内抵接,所述连接段与所述转台二级同步带轮传动连接。
15.其中,所述转台一级同步带轮包括转台一级主动轮、转台一级从动轮和转台一级同步带,所述转台一级主动轮和所述转台一级从动轮通过所述转台一级同步带传动连接;所述转台二级同步带轮包括转台二级主动轮、转台二级从动轮和转台二级同步带,所述转台二级主动轮和所述转台二级从动轮通过所述转台二级同步带传动连接。
16.其中,所述底座还包括转台传动轴,且所述隔板构造有供所述转台传动轴穿过的轴孔,所述转台传动轴包括安装套、两个轴承以及轴体,所述两个轴承分别过盈配合地设置于所述安装套的两端,所述轴体设置于所述安装套之内并同时与所述两个轴承内环相连接,所述轴体一端通过所述轴孔与所述转台一级从动轮连接,另一端与所述转台二级主动轮连接。
17.其中,还包括:
18.多个第一固定螺钉以及第一张紧机构;
19.所述隔板构造有多个第一腰型孔,所述第一固定螺钉通过所述第一腰型孔与所述安装套固定连接;
20.所述第一张紧机构包括第一支架和第一转动螺栓,所述第一支架构造有第一连接端和第一螺纹端,所述第一张紧机构通过所述第一连接端与所述隔板固定连接,所述第一张紧机构位于所述隔板之下,所述第一转动螺栓与所述第一螺纹端可转动地连接,所述第一转动螺栓的螺头靠近所述安装套设置,通过转动所述第一转动螺栓可以调整所述第一转动螺栓在水平方向上的位置,使所述第一转动螺栓的螺头与所述安装套相抵接,并通过挤压所述安装套,使所述安装套在沿所述第一腰型孔对应的轨迹移动。
21.其中,还包括:多个第二固定螺钉以及第二张紧机构;
22.所述隔板构造有多个第二腰型孔,所述第二固定螺钉通过所述第二腰型孔与所述转台驱动电机固定连接;
23.所述第二张紧机构包括第二支架和第二转动螺栓,所述第二支架构造有第二连接端和第二螺纹端,所述第二张紧机构通过所述第二连接端与所述隔板固定连接,所述第二
张紧机构位于所述隔板之下,所述第二转动螺栓与所述螺纹端可转动地连接,所述第二转动螺栓的螺头靠近所述转台驱动电机设置,通过转动所述第二转动螺栓可以调整所述第二转动螺栓在水平方向上的位置,使所述第二转动螺栓的螺头与所述转台驱动电机相抵接,并通过挤压所述转台驱动电机,使所述转台驱动电机在沿所述第二腰型孔对应的轨迹移动。
24.其中,所述大臂驱动电机和所述小臂驱动电机上下层叠设置,所述大臂减速组件和所述小臂减速组件分别位于所述基座的左右两外侧面。
25.其中,所述大臂减速组件包括大臂一级同步带轮和临近所述基座设置的大臂二级同步带轮;
26.所述小臂减速组件包括小臂一级同步带轮和临近所述基座设置的小臂二级同步带轮。
27.本发明还提出一种桌面机械臂,该桌面机械臂包括前述所记载的桌面机械臂驱动结构,该桌面机械臂驱动结构包括底座、转台和执行电机;
28.所述底座中设有转台驱动电机以及转台驱动轴,所述转台驱动电机与所述转台驱动轴传动连接,所述转台驱动轴与所述转台传动连接,所述转台上设有大臂驱动电机和小臂驱动电机,所述转台驱动电机、所述大臂驱动电机和所述小臂驱动电机均为包括绝对值编码器的伺服电机;
29.所述执行电机设置于末端。
30.本发明还提出一种机器人,该机器人包括前述所记载的桌面机械臂,该桌面机械臂包括桌面机械臂驱动结构,该桌面机械臂驱动结构包括底座、转台和执行电机;
31.所述底座中设有转台驱动电机以及转台驱动轴,所述转台驱动电机与所述转台驱动轴传动连接,所述转台驱动轴与所述转台传动连接,所述转台上设有大臂驱动电机和小臂驱动电机,所述转台驱动电机、所述大臂驱动电机和所述小臂驱动电机均为包括绝对值编码器的伺服电机;
32.所述执行电机设置于末端。
33.与现有技术相比,本发明实施例的有益效果在于:
34.本发明实施例所提出的桌面机械臂驱动结构,其底座中所设转台驱动电机与转台驱动轴传动连接,转台驱动轴与转台传动连接,并且转台上设有大臂驱动电机和小臂驱动电机,所涉及的控制转台、大臂和小臂的驱动电机分别采用伺服电机,并对应配置绝对值编码器,可提高控制精度和驱动动力,并且所采用的绝对值编码器,其相较于一般的增量式编码器,无需断电记忆以及开机重新找零或参考位,抗干扰性强且数据可靠性高,从而使桌面机械臂适应于工业级应用。
附图说明
35.图1为现有技术中一桌面机械臂的结构示意图;
36.图2为本发明桌面机械臂驱动结构一实施例的结构示意图;
37.图3为图2所示的桌面机械臂驱动结构的爆炸示意图;
38.图4为本发明桌面机械臂驱动结构的底座的内部结构示意图;
39.图5为本发明桌面机械臂驱动结构的转台驱动电机、转台驱动轴及转台减速组件
的装配结构图;
40.图6为本发明桌面机械臂驱动结构的转台驱动电机、转台驱动轴及转台减速组件的爆炸示意图;
41.图7为本发明桌面机械臂驱动结构的底座的剖视图;
42.图8为本发明桌面机械臂驱动结构的底座的爆炸图;
43.图9为本发明桌面机械臂驱动结构的转台的结构示意图;
44.图10为本发明桌面机械臂驱动结构的底座的部分剖视图;
45.图11为本发明桌面机械臂驱动结构的底座的部分剖视图;
46.图12为本发明桌面机械臂驱动结构的底座的底部结构示意图;
47.图13为本发明桌面机械臂驱动结构的第一张紧机构的结构示意图;
48.图14为本发明桌面机械臂驱动结构的转台与大臂和小臂的装配结构示意图;
49.图15为图14中c处的局部放大示意图;
50.图16为本发明桌面机械臂驱动结构的转台的一部分结构示意图;
51.图17为本发明桌面机械臂驱动结构的转台的又一部分结构示意图;
52.图18为本发明桌面机械臂一实施例的结构示意图;
53.图19为图18中桌面机械臂另一视角下的结构示意图;
54.图20为本发明桌面机械臂驱动结构的基座的爆炸示意图;
55.图21为本发明桌面机械臂驱动结构的转台的一部分爆炸结构示意图;
56.图22为本发明桌面机械臂驱动结构的转台的又一部分爆炸结构示意图;
57.图23为本发明桌面机械臂又一实施例的结构示意图。
具体实施方式
58.下面将结合本发明实施例中的附图,对本发明实施例中的方案进行清楚完整的描述,显然,所描述的实施例仅是本发明中的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
59.桌面机械臂作为机械臂的一个细分品类,由底座、转台、大臂、小臂、末端以及转台驱动电机、大臂驱动电机、小臂驱动电机构成,转台与底座可旋转的连接,大臂分别与转台和小臂连接,小臂与末端连接,末端用于设置执行器,转台驱动电机用于驱动转台相对于底座转动,大臂驱动电机用于驱动大臂运动,小臂驱动电机用于驱动小臂运动,大臂与小臂利用平行四边形原理以可驱动末端在工作空间内运动。例如如图1所示的申请号为cn201620105515.2的中国专利所公开的机械臂及机器人。
60.目前,桌面机械臂通常为教育型桌面机械臂,其末端所抓取的重量较轻,负载较小,对于控制精度以及驱动动力要求不高,桌面机械臂的转台驱动电机、大臂驱动电机和小臂驱动电机通常采用步进电机;然而,随着工业水平的提高,为适应市场需求,桌面机械臂逐渐朝向工业级应用发展,如应用至视觉分拣、流水线搬运等领域,其被要求抓取更重的物体,负载变大,所以桌面机械臂的转台驱动电机、大臂驱动电机和小臂驱动电机采用步进电机,其虽具有体积小、成本低的优点,但却不能够适应工业级的应用。
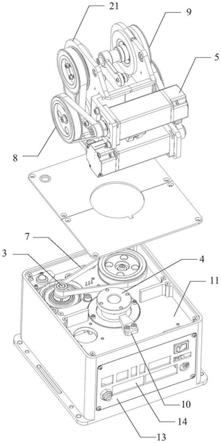
61.为解决上述技术问题,本发明提出一种桌面机械臂驱动结构,参照图2至图4,该桌
面机械臂驱动结构包括底座1、转台2;
62.底座1中设有转台驱动电机3以及转动驱动轴4,转台驱动电机3与转台驱动轴4传动连接,转台驱动轴4与转台2传动连接,转台2上设有大臂驱动电机5和小臂驱动电机6,转台驱动电机3、大臂驱动电机5和小臂驱动电机6均为包括绝对值编码器的伺服电机。
63.本实施例中,底座1被构造为矩形状,矩形状的底座1内构造有容置腔,容置腔用于安装转台驱动电机3和转台驱动轴4,转台驱动电机3、转台驱动轴4、转台2依次传动连接,所采用的传动连接结构可为同步带减速组件、齿轮减速组件等,包括但不限于此,当然,转台2也可直接与转台驱动轴4相连以随其转动。作为优设,转台驱动轴4为中空转轴,以通过中空转轴对底座1与大臂驱动电机5和小臂驱动电机6之间的线缆走线。
64.在本桌面机械臂驱动结构中,所涉及的控制转台2、大臂500和小臂2000的驱动电机分别采用伺服电机,并对应配置绝对值编码器,可提高控制精度和驱动动力,并且所采用的绝对值编码器,其相较于一般的增量式编码器,无需断电记忆以及开机重新找零或参考位,抗干扰性强且数据可靠性高,从而使桌面机械臂适应于工业级应用。
65.在一较佳实施例中,底座1或转台2上设有与大臂驱动电机5和小臂驱动电机6的绝对值编码器电连接的电池或电池仓或用于连接电池的端子或用于连接电池的端口。
66.底座1或转台2上设有与转台驱动电机3的绝对值编码器电连接的电池或电池仓或用于连接电池的端子或用于连接电池的端口。
67.在本实施例中,通过电池对大臂驱动电机5、小臂驱动电机6、转台驱动电机3上的绝对值编码器供电,其供电设置形式以及结构可为多种,比如上述的绝对值编码器与电池直连,或者绝对值编码器与电池仓电连接,亦或者绝对值编码器电连接有端子或端口,以通过端子或端口连接电池,通断方便,操作简单。
68.在一较佳实施例中,转台驱动电机3、大臂驱动电机5和小臂驱动电机6的绝对值编码器均为多圈绝对值编码器。其中,相对于单圈绝对值编码器,多圈绝对值编码器具备安装调试简单、无需找零点、多功能输出法和使用寿命长等优点,故在转台驱动电机3、大臂驱动电机5和小臂驱动电机6选用绝对值编码器时,可优先选择多圈绝对值编码器。
69.在一较佳实施例中,大臂驱动电机5和小臂驱动电机6均还包括断电抱闸的电磁抱闸器。本实施例中,通过所设电磁抱闸器,大臂驱动电机5和小臂驱动电机6在断电后迅速停转以进行机械制动,从而可避免在断电后,桌面机械臂的大臂以及小臂自动掉落,提高安全性。
70.在一较佳实施例中,参照图2至图4,转台驱动轴4设置于底座1的中心区域,转台驱动电机3错位设置于转台驱动轴4周围;
71.转台2包括基座21,大臂驱动电机5与小臂驱动电机6设置于基座21的后侧。
72.本实施例中,转台驱动轴4位于容置腔的中心区域,转台驱动电机3位于转台驱动轴4的周围,以在底座1的容置腔内形成错位布置,错位布置的转台驱动轴4和转台驱动电机3可降低桌面机械臂的整体高度,从而降低桌面机械臂的重心,进而保证桌面机械臂在抓取重物时不会发生晃动或侧翻。转台驱动电机3可正装或倒装,本领域技术人员可根据实际情况进行设计,其仅需保证转台驱动电机3与转台驱动轴4错位布置在底座1内。转台驱动电机3正装时,其输出轴朝向底座1上方,转台驱动电机3倒装时,其输出轴朝向底座1下方。作为优选,本发明实施例所提出的转台驱动电机3呈正装设置在底座1内,此仅为实例性的,而非
限制性的。
73.转台包括基座21,基座21的前侧设有用于抓取物品的大臂500和小臂2000,基座21的后侧设有大臂驱动电机5和小臂驱动电机6,以通过大臂驱动电机5和小臂驱动电机6与大臂500和小臂2000形成平衡,避免桌面机械臂的重心偏离底座1的中心位置,从而保证桌面机械臂在抓取重物时不会因重心偏向大臂500和小臂2000所在一侧而导致晃动或侧翻。
74.在一较佳实施例中,参照图3,本桌面机械臂驱动结构还包括:
75.转台减速组件7,转台驱动电机3通过转台减速组件7与转台驱动轴4传动连接;
76.大臂减速组件8,大臂减速组件8与大臂驱动电机5传动连接;
77.小臂减速组件9,小臂减速组件9与小臂驱动电机6传动连接。
78.本实施例中,转台驱动轴4通过转台减速组件7减速传动,转台减速组件7起到匹配转速和传递转矩的作用。具体的,转台驱动电机3产生的转矩会先传递给转台减速组件7,再由转台减速组件7对传递的转矩的转速进行匹配,而后再将匹配转速后的转矩传递给转台驱动轴4,以使得转台驱动轴4带动转台2转动。大臂驱动电机5所产生的转矩也会先传递给大臂减速组件8,再由大臂减速组件8对传递的转矩的转速进行匹配,而后再将匹配转速后的转矩传递给大臂500,以带动大臂500转动。小臂驱动电机6所产生的转矩也会先传递给小臂减速组件9,再由小臂减速组件9对传递的转矩的转速进行匹配,而后再将匹配转速后的转矩传递给小臂2000,以带动小臂2000转动。
79.在一较佳实施例中,参照图5,转台减速组件7包括转台一级同步带轮71和转台二级同步带轮72;转台一级同步带轮71的一端与转台驱动电机3传动连接,另一端与转台二级同步带轮72的一端传动连接,转台二级同步带轮72的另一端与转台驱动轴4传动连接。
80.本实施例中,转台减速组件7包括有转台一级同步带轮71和转台二级同步带轮72,通过转台一级同步带轮71与转台二级同步带轮72对转台驱动电机3所产生的转矩进行二级减速,以保证减速后的转矩能够满足转台驱动轴4的使用需求。具体的,转台驱动电机3所产生的转矩先由转台一级同步带轮71进行一级减速,一级减速后的转矩再经由转台二级同步带轮72进行二级减速,二级减速后的转矩再传递给转台驱动轴4,以通过转台驱动轴4带动转台2转动。
81.在一较佳实施例中,参照图3和图7,底座1内构造有在水平方向上延展的隔板11,转台一级同步带轮71设置在隔板11顶面上,转台驱动电机3设置于隔板11底面之下,转台驱动电机3的输出轴穿出隔板11与转台一级同步带轮71的一端传动连接,转台二级同步带轮72设置在隔板11底面上。
82.本实施例中,此时根据底座1的布置状态,如图7中所示a代表隔板11顶面,b代表隔板11底面,优选底座1内水平设置有隔板11,以将底座1的内部空间分割两个空间,且优选隔板11与底座1顶部之间的距离小于隔板11与底座1底部之间的距离,而转台一级同步带轮71设置在隔板11的顶面上,转台二级同步带轮72和转台驱动电机3均位于设置在隔板11的底面上。本实施例中,通过在底座1内设置隔板11来安装转台驱动电机3、转台一级同步带轮71和转台二级同步带轮72等部件,从而有利于增加固定上述部件的稳定性。在另外的实施例中,在隔板11上安装转台驱动电机3、转台一级同步带轮71和转台二级同步带轮72的方式可以是隔板11与底座1为可拆卸连接,首先将转台驱动电机3、转台一级同步带轮71和转台二级同步带轮72固定在隔板11上,而后将隔板11固定在底座1内即可。
83.在一较佳实施例中,参照图8,底座1的一侧构造有安装板缺口12,底座1还包括安装板13,安装板13设置于安装板缺口12处,安装板13构造有若干个接口卡口14。
84.本实施例中,在底座1的一侧构造有安装板缺口12,该安装板缺口12通过安装板13盖合,安装板13上设有多个接口卡口14,以通过接口卡口14安装电路接口。由于本发明实施例所提出的接口卡口14是设置在安装板13上的,而安装板13又是与底座1可拆卸连接的,因此,在电路接口发生变化时只需更换对应的安装板13即可,或者将原有的安装板13取下后再在其上开设与新增的电路接口相对应的接口卡口14,此外,还可方便底座1的拆装维修。
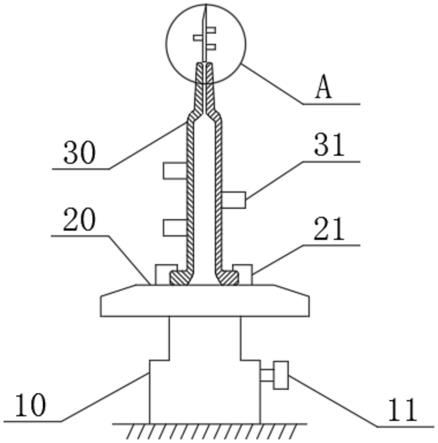
85.在一较佳实施例中,参照图3和图9,隔板11上临近安装板13的一侧设有止挡板10,止挡板10位于转台2下方,转台2上设有用于与止挡板10抵接的转台限位柱20,转台限位柱20位于靠近大臂500和小臂2000的一侧。
86.本实施例中,转台驱动轴4为空心轴,桌面机械臂的线缆通过转台驱动轴4进行走线。可以理解的是,从转台驱动轴4穿出的线缆的一端是固定在底座1内的,而另一端是固定在转台2上的,在转台驱动轴4带动转台2转动时,固定于转台2上的线缆也会随之转动。若转台2朝同一个方向连续转动,则线缆会在此旋转方向上收卷,而由于线缆与底座1固定且线缆的长度有限,因此在转台2朝同一方向连续转动的过程中,会扯断线缆。为此,本实施例在隔板11上设有用于限定转台驱动轴4转动角度的止挡板10,止挡板10位于转台驱动轴4的周向上,而在转台驱动轴4或转台2上设有用于止挡板10抵接的转台限位柱20,以通过转台限位柱20与止挡板10的抵接配合对转台驱动轴4的转动角度进行限定。具体的,止挡板10位于转台2的后侧方向上,在转台驱动轴4旋转过程中,若转台限位柱20与止挡板10接触并抵接,则停止朝此方向继续转动,以避免继续转动而扯断线缆。
87.在一较佳实施例中,止挡板10包括与隔板11连接的固定部和朝向转台驱动轴4延伸的限位部,限位部的两侧壁朝向转台驱动轴4收缩。
88.本实施例中,固定部与隔板11连接,固定部上连接有朝向转台驱动轴4延伸的限位部,以通过限位部与止挡板10的抵接配合,限制转台2的转动角度。具体的,限位部朝向转台驱动轴4的端面为圆弧面,该圆弧面与转台驱动轴4的周向弧面相适配,以避免转台驱动轴4在转动过程中发生碰撞。作为优选,本发明实施例所提出的限位部的两侧壁的延长线相交所构成的夹角范围在5至60度之间,当夹角为5度时,转台驱动轴4的转动角度为177.5度,而当夹角为60度时,转台驱动轴4的转动角度为150度。
89.在一较佳实施例中,参照图10,转台驱动轴4通过推力轴承30设置在隔板11上。
90.本实施例中,优选转台驱动轴4通过推力轴承30设置在隔板11上,且转台减速组件7(即转台二级同步带轮72)通过转台驱动轴4与转台2传动连接,以此避免转台减速组件7直接承受转台2的重量,从而有利于增加转台减速组件7的寿命,即当转台减速组件7的输出轴直接与转台2连接时需要直接承受转台2的重量,从而使得转台减速组件7受力较大,从而相当于提升了转台减速组件7的负载重量。此时,优选转台驱动轴4位于隔板11的中心位置。
91.在一较佳实施例中,参照图10,隔板11上构造容纳腔40,容纳腔40构造有与推力轴承30的外环下缘相适配的承接结构50,推力轴承30设置于容纳腔40之内,且推力轴承30的外环下缘与承接结构50相接,转台驱动轴4在竖直方向上自上而下的插入推力轴承30的内环设置,转台驱动轴4构造有承载段41、插装段42和连接段43,承载段41与推力轴承30的内环上缘抵接,插装段42与推力轴承30的内环内抵接,连接段43与转台二级同步带轮72传动
连接。
92.本实施例中,优选隔板11的中心位置构造有安装推力轴承30的容纳腔40,且腔体的底部设置有与可承接推力轴承30的外环下缘的承载结构,此时优选承载结构为环体,而推力轴承30安装在容纳腔40内后,承接结构50既可与推力轴承30的外环下缘抵接,以实现承接推力轴承30的目的,至于转台驱动轴4则在竖直方向上自上而下的插入推力轴承30的内环中即可。同时,转台驱动轴4分为自下至上分为连接段43、插装段42和承载段41(即插装段42的直径小于承载段41的直径,此时优选连接段43与插装段42的直径一致),其中插装段42可插装在推力轴承30的内环内,而连接段43则穿过推力轴承30并与转台二级同步带轮72传动连接,承载段41靠近插装段42的一端可与推力轴承30的内环上缘抵接,以使推力轴承30承接转台2的重量。
93.在一较佳实施例中,参照图10,桌面机械臂驱动结构还包括:轴承压板60,轴承压板60构造为中空环形,轴承压板60设置于推力轴承30之上并与推力轴承30的外环抵接,轴承压板60与隔板11固定连接。
94.本实施例中,优选底座1还包括轴承压板60,且优选轴承压板60呈环形板体,该轴承压板60可套设在承载段41上,此时轴承压板60可封堵容纳腔40的开口端并可与推力轴承30的外环上缘.抵接。此时优选轴承压板60与隔板11为可拆卸连接,如通过螺钉固定,从而有利于防止位于容纳腔40内的推力轴承30滑出。
95.在一较佳实施例中,推力轴承30为双列角接触轴承。
96.本实施例中,优选推力轴承30为双列角接触轴承,由于双列角接触轴承只占用较小的轴向空间,从而有利于减小转台驱动轴4的长度,进而降低底座1的高度。同时,由于双列角接触球轴承还可以提供刚性较高的轴承配置,并能承受倾覆力矩。
97.在一较佳实施例中,参照图6,转台一级同步带轮71包括转台一级主动轮711、转台一级从动轮712和转台一级同步带713,转台一级主动轮711和转台一级从动轮712通过转台一级同步带713传动连接;
98.转台二级同步带轮72包括转台二级主动轮721、转台二级从动轮722和转台二级同步带723,转台二级主动轮721和转台二级从动轮722通过转台二级同步带723传动连接。
99.本实施例中,优选转台一级同步带轮71包括转台一级主动轮711、转台一级从动轮712和转台一级同步带713,其中转台一级主动轮711套设在转台驱动电机3的输出轴上,转台一级从动轮712通过转台2传动轴设置在隔板11上,而转台一级同步带713分别连接转台一级主动轮711和转台一级从动轮712即可,至于转台一级主动轮711和转台一级从动轮712的传动比则根据实际需要减速的情况进行布置即可。
100.优选转台二级同步带轮72包括转台二级主动轮721、转台二级从动轮722和转台二级同步带723,其中转台二级主动轮721套设在转台2传动轴上(此时转台2传动轴的一端由上至下穿过隔板11布置),转台二级从动轮722套设在转台驱动轴4上(此时转台驱动轴4的一端由上至下穿过隔板11布置),而转台二级同步带723分别连接转台二级主动轮721和转台二级从动轮722即可,至于转台二级主动轮721和转台二级从动轮722的传动比则根据实际需要减速的情况进行布置即可。
101.在一较佳实施例中,参照图11,底座1还包括转台传动轴70,且隔板11构造有供转台传动轴70穿过的轴孔,转台传动轴70包括安装套701、两个轴承702以及轴体703,两个轴
承702分别过盈配合地设置于安装套701的两端,轴体703设置于安装套701之内并同时与两个轴承702内环相连接,轴体703一端通过轴孔与转台一级从动轮712连接,另一端与转台二级主动轮721连接。
102.本实施例中,优选转台传动轴70包括安装套701、轴体703以及两个轴承702,且轴体703通过两个轴承702安装在安装套701内,安装套701固定在隔板11上,优选安装套701位于隔板11的下方,且隔板11上具有与安装套701对应的轴孔,以使安装在安装套701内的轴体703穿过。此时,转台一级从动轮712与轴体703位于隔板11之上的一端连接,转台二级主动轮721与轴体703位于隔板11之下的一端连接。
103.在一较佳实施例中,参照图12和图13,桌面机械臂驱动结构还包括:
104.多个第一固定螺钉以及第一张紧机构90;
105.隔板11构造有多个第一腰型孔111,第一固定螺钉通过第一腰型孔111与安装套701固定连接;
106.第一张紧机构90包括第一支架901和第一转动螺栓902,第一支架901构造有第一连接端和第一螺纹端,第一张紧机构90通过第一连接端与隔板11固定连接,第一张紧机构90位于隔板11之下,第一转动螺栓902与第一螺纹端可转动地连接,第一转动螺栓902的螺头靠近安装套701设置,通过转动第一转动螺栓902可以调整第一转动螺栓902在水平方向上的位置,使第一转动螺栓902的螺头与安装套701相抵接,并通过挤压安装套701,使安装套701在沿第一腰型孔111对应的轨迹移动。
107.本实施例中,优选隔板11上具有多个第一腰型孔111,此时安装套701可以与穿过第一腰型孔111的第一固定螺钉连接,以此将安装套701固定在隔板11上,同时还可利用第一固定螺钉在第一腰型孔111内移动,以此带动位于轴体703上的转台二级主动轮721朝向或远离转台二级从动轮722移动,从而方便调节转台二级同步带723的张紧度。
108.同时,底座1内还设置有第一张紧机构90,且第一张紧机构90设置在隔板11的底面上并位于转台二级主动轮721和转台二级从动轮722之间,第一张紧机构90包括与隔板11连接的第一支架901和第一转动螺栓902,第一支架901包括第一连接端和第一螺纹端,第一连接端与隔板11连接,而第一转动螺栓902与第一螺纹端螺纹配合,以使第一转动螺栓902的螺头可与安装套701抵接,至于抵接的位置则可根据实际情况进行布置即可。本实施例中,在安装转台传动轴70时,首先通过第一固定螺钉穿过第一腰型孔111与安装套701连接但不完全紧固第一固定螺钉,以使转台传动轴70可跟随第一固定螺钉在第一腰型孔111内移动即可,此时通过拧动第一转动螺栓902即可驱动转台传动轴70带动转台二级主动轮721远离转台二级从动轮722移动,从而改变转台二级同步带723的张紧度,在转台二级同步带723的张紧度处于适当状态时(即转台传动轴70移动至预设位置),再利用第一固定螺钉固定安装套701即可,从而方便了转台传动轴70的安装,同时利用第一转动螺栓902与安装套701抵接也可增加转台传动轴70运行时的稳定性。
109.在一较佳实施例中,参照图10,转台二级从动轮722与连接段43可拆卸连接,转台二级从动轮722构造有.抵接结构100,抵接结构100构造成与连接段43相适配的环形状,转台二级从动轮722与连接段43固定连接时.抵接结构100与推力轴承30的内环的下缘相抵接,且转台二级从动轮722上设置有连接结构200,连接结构200为多个螺纹通孔,连接段43构造有与螺纹通孔适配的螺纹孔。
110.本实施例中,转台二级从动轮722套设在转台驱动轴4(即插装段42)上,且转台二级从动轮722上设置有位于转台驱动轴4正下方的连接结构200。此时,连接结构200为转台二级从动轮722上设置的多个螺纹通孔,且转台驱动轴4的底部设置有可与螺纹通孔配合的螺纹孔,此时利用螺钉依次穿过螺纹通孔和螺纹孔即可转台二级从动轮722固定在转台驱动轴4上。
111.优选转台二级从动轮722上设置抵接结构100,且优选.抵接结构100为套筒结构,并可套设在转台驱动轴4上,且.抵接结构100的顶部可与推力轴承70230的内环下缘抵接。此时,优选连接结构200的顶面与转台驱动轴4的底面之间间隔预设距离,即连接结构200与转台驱动轴4的底部之间存在一定的缝隙,由于加工存在一定的误差,所以为了避免连接结构200与转台驱动轴4的底部.抵接时.抵接结构100无法与推力轴承70230的内环下缘抵接,从而即可利用连接结构200与转台驱动轴4的底部之间存在一定的缝隙来避免出现上述情形,以便于利用抵接结构100与承载段41对推力轴承70230形成夹持状态,以避免推力轴承70230在插装段42上滑动。
112.在一较佳实施例中,参照图10,桌面机械臂驱动结构还包括定位销300,连接段43设置有定位孔,转台二级从动轮722设置有定位通孔,定位销300通过定位通孔插入定位孔设置。
113.本实施例中,底座1还包括定位销300,连接段43的底部设置有定位孔,转台二级从动轮722上设置有定位通孔,而定位销300则可依次穿过定位通孔和定位孔将转台二级从动轮722在连接段43上进行定位,以方便转台二级从动轮722的固定。
114.在一较佳实施例中,参照图12,桌面机械臂驱动结构还包括:
115.多个第二固定螺钉以及第二张紧机构400;
116.隔板11构造有多个第二腰型孔112,第二固定螺钉通过第二腰型孔112与转台驱动电机3固定连接;
117.第二张紧机构400包括第二支架和第二转动螺栓,第二支架构造有第二连接端和第二螺纹端,第二张紧机构400通过第二连接端与隔板11固定连接,第二张紧机构400位于隔板11之下,第二转动螺栓与螺纹端可转动地连接,第二转动螺栓的螺头靠近转台驱动电机3设置,通过转动第二转动螺栓可以调整第二转动螺栓在水平方向上的位置,使第二转动螺栓的螺头与转台驱动电机3相抵接,并通过挤压转台驱动电机3,使转台驱动电机3在沿第二腰型孔112对应的轨迹移动。
118.本实施例中,优选隔板11上具有多个第二腰型孔112,此时转台驱动电机3可以与穿过第二腰型孔112的第二固定螺钉连接,以此将转台驱动电机3固定在隔板11上,同时还可利用第二固定螺钉在第二腰型孔112内移动,以此带动位于转台驱动电机3上的转台一级主动轮711朝向或远离转台一级从动轮712移动,从而方便调节转台一级同步带713的张紧度。此时,优选转台驱动电机3上具有与第二固定螺钉配合的螺纹孔,从而无需设置螺母即可对转台驱动电机3进行固定。
119.同时,底座1内还设置有第二张紧机构400,且第二张紧机构400设置在隔板11的底面上并位于转台一级主动轮711和转台一级从动轮712之间,第二张紧机构400包括与隔板11连接的第二支架和第二转动螺栓,第二支架包括第二连接端和第二螺纹端,第二连接端与隔板11连接,而第二转动螺栓与第二螺纹端螺纹配合,以使第二转动螺栓的螺头可与转
台驱动电机3抵接,至于抵接的位置则可根据实际情况进行布置即可。本实施例中,在安装转台驱动电机3时,首先通过第二固定螺钉穿过第二腰型孔112与转台驱动电机3连接但不完全紧固第二固定螺钉,以使转台驱动电机3可跟随第二固定螺钉在第二腰型孔112内移动即可,此时通过拧动第二转动螺栓即可驱动转台驱动电机3带动转台一级主动轮711远离转台一级从动轮712移动,从而改变转台一级同步带713的张紧度,在转台一级同步带713的张紧度处于适当状态时(即转台驱动电机3移动至预设位置),再利用第二固定螺钉固定转台驱动电机3即可,从而方便了转台驱动电机3的安装,同时利用第二转动螺栓与转台驱动电机3抵接也可增加转台驱动电机3运行时的稳定性。其中,第二张紧机构400的结构与第一张紧机构90的结构相似。
120.在一较佳实施例中,参照图14和图15,基座21上设有位于大臂500前后两侧的限位件600,限位件600用于与大臂500末端上设置的止挡块700形成抵持配合。
121.本实施例中,大臂500在转动时,会带动位于其上的止挡块700转动,止挡块700在转动至限位件600所在位置时,会被限位件600阻挡在此位置,从而形成对于大臂500的转动限位。
122.在一较佳实施例中,大臂驱动电机5和小臂驱动电机6上下层叠设置,大臂减速组件8和小臂减速组件9分别位于基座21的左右两外侧面。
123.本实施例中,大臂驱动电机5和小臂驱动电机6优选上下层叠布置,其可优化空间布局,节省空间,提高结构紧凑性,有助于桌面机械臂的小巧化以及轻便化,而大臂减速组件8和小臂减速组件9分别设于基座21的左右两外侧面,简化了结构设计,拆装简单,便于日常维护。
124.在一较佳实施例中,参照图16和图17,大臂减速组件8包括大臂一级同步带轮81和临近基座21设置的大臂二级同步带轮82;
125.小臂减速组件9包括小臂一级同步带轮91和临近基座21设置的小臂二级同步带轮92。
126.本实施例中,大臂减速组件8的大臂二级同步带轮82临近基座21布置,即大臂二级同步带轮82位于大臂一级同步带轮81与基座21之间;小臂减速组件9的小臂二级同步带轮92临近基座21布置,即小臂二级同步带轮92位于小臂一级同步带轮91与基座21之间,可实现大臂一级同步带和小臂一级同步带与转台2上结构(如电机固定螺丝等)的远离布置,不仅不会发生结构干涉,还可免去辅助组件的设置,降低制造成本,并且因没有辅助组件的结构限制,一级同步带轮的带轮的尺寸可做大,从而提高减速比和减速效果,保证控制精度。
127.在一较佳实施例中,参照图16和图17,大臂减速组件8还包括大臂传动轴83和大臂驱动轴84,大臂驱动轴84位于大臂传动轴83上方,大臂一级同步带轮81设于大臂驱动电机5的输出轴和大臂传动轴83之间,大臂二级同步带轮82设于大臂传动轴83和大臂驱动轴84之间;
128.小臂减速组件9还包括小臂传动轴93和小臂驱动轴94,小臂驱动轴94位于小臂传动轴93上方,小臂一级同步带轮91设于小臂驱动电机6的输出轴和小臂传动轴93之间,小臂二级同步带轮92设于小臂传动轴93和小臂驱动轴94之间。
129.本实施例中,大臂驱动轴84用于与大臂500连接,大臂驱动电机5的输出轴通过大臂一级同步带轮81带动大臂传动轴83转动,实现一级减速传动;大臂传动轴83通过大臂二
级同步带轮82带动大臂驱动轴84转动,实现二级减速传动,并最终通过大臂驱动轴84驱动大臂500转动。小臂驱动轴94用于驱动小臂2000转动,并与小臂2000之间可设置多根传动连杆以进行传动,其具体形式可参照现有设置,在此不作阐述。小臂驱动电机6的输出轴通过小臂一级同步带轮91带动小臂传动轴93转动,实现一级减速传动;小臂传动轴93通过小臂二级同步带轮92带动小臂驱动轴94转动,实现二级减速传动,并最终通过小臂驱动轴94驱动小臂2000转动。
130.在一较佳实施例中,参照图18和图19,大臂驱动电机5的绝对值编码器为单圈绝对值编码器,其包括第一环形码盘5a和第一检测器5b,第一环形码盘5a同轴地安装在大臂驱动轴84上,第一检测器5b与第一环形码道5a相对设置;
131.小臂驱动电机6的绝对值编码器为单圈绝对值编码器,其包括第二环形码盘6a和第二检测器6b,第二环形码盘6a同轴地安装在小臂驱动轴94上,第二检测器6b与第二环形码盘6a相对设置。
132.在一较佳实施例中,参照图16和图17,大臂一级同步带轮81包括大臂一级主动轮811、大臂一级从动轮812和大臂一级同步带813,大臂二级同步带轮82包括大臂二级主动轮821、大臂二级从动轮822和大臂二级同步带823;
133.大臂一级主动轮811设于大臂驱动电机5的输出轴上,大臂一级从动轮812设于大臂传动轴83上,大臂一级同步带813设于大臂一级主动轮811和大臂一级从动轮812上;大臂二级主动轮821设于大臂传动轴83上,大臂二级从动轮822设于大臂驱动轴84上,大臂二级同步带823设于大臂二级主动轮821和大臂二级从动轮822上;
134.小臂一级同步带轮91包括小臂一级主动轮911、小臂一级从动轮912和小臂一级同步带913,小臂二级同步带轮92包括小臂二级主动轮921、小臂二级从动轮922和小臂二级同步带923;
135.小臂一级主动轮911设于小臂驱动电机6的输出轴上,小臂一级从动轮912设于小臂传动轴93上,小臂一级同步带913设于小臂一级主动轮911和小臂一级从动轮912上,小臂二级主动轮921设于小臂传动轴93上,小臂二级从动轮922设于小臂驱动轴94上,小臂二级同步带923设于小臂二级主动轮921和小臂二级从动轮922上。
136.本实施例中,大臂一级从动轮812的直径大于大臂一级主动轮811的直径,大臂二级从动轮822的直径大于大臂二级主动轮821的直径,大臂驱动电机5的输出轴带动大臂一级主动轮811转动,并经大臂一级同步带813传动大臂一级从动轮812以使得大臂传动轴83转动,进一步地,大臂传动轴83带动大臂二级主动轮821转动,并经大臂二级同步带823传动大臂二级从动轮822以使得大臂驱动轴84转动。
137.小臂一级从动轮912的直径大于小臂一级主动轮911的直径,小臂二级从动轮922的直径大于小臂二级主动轮921的直径,小臂驱动电机6的输出轴带动小臂一级主动轮911转动,并经小臂一级同步带913传动小臂一级从动轮912以使得小臂传动轴93转动,进一步地,小臂传动轴93带动小臂二级主动轮921转动,并经小臂二级同步带923传动小臂二级从动轮922以使得小臂驱动轴94转动。
138.在一较佳实施例中,参照图20,基座21包括:底板211;以及第一承载件212和第二承载件213,第一承载件212和第二承载件213相对设置于底板211上,第一承载件212上构造有第一安装座212a,第二承载件213上构造有第二安装座213a。
139.本实施例中,底板211为板体,第一承载件212和第二承载件213可为架体、板体等结构形式,并相对设置于底板211上。第一承载件212上的第一安装座212a用于安装大臂驱动电机5,且大臂减速组件8设置于第一承载件212上,第二承载件213上的第二安装座213a用于安装小臂驱动电机6,且小臂减速组件9设置于第二承载件213上。需要说明的是,第一安装座212a可与第一承载件212一体成型或与第一承载件212上可拆卸连接,可拆卸连接方式比如螺丝连接等。此外,第二安装座213a在第二承载件213上的设置亦可如此。
140.在一较佳实施例中,参照图16和图17,大臂一级主动轮811布置于大臂驱动电机5的输出轴的末端,以构成大臂驱动电机5的输出轴上处于大臂一级主动轮811与第一安装座212a之间的第一空余段51;
141.小臂一级主动轮911布置于小臂驱动电机6的输出轴的末端,以构成小臂驱动电机6的输出轴上处于小臂一级主动轮911与第二安装座213a之间的第二空余段52;
142.第一安装座212a向与第二承载件213相反的一侧凸出,第二安装座213a向与第一承载件212相反的一侧凸出。
143.本实施例中,为避免结构干涉,所预留出的第一空余段51的长度别大于第一安装座212a上所设置凸出结构(例如大臂驱动电机5的固定螺丝)的长度,如此,即可保证大臂一级同步带813在运行过程中不接触到第一安装座212a上的凸出结构,实现正常减速传动。相应地,第二空余段52的预留也采用上述相同原理,且可获得相同的作用效果,在此不作过多阐述。此外,还可通过将第一空余段51进一步加长设置,以为大臂二级同步带823轮82提供安装位置,以及将第二空余段52进一步加长设置,以为小臂二级同步带923轮92提供安装位置。此外,第一安装座212a向与第二承载件213相反的一侧凸出,其可与上述的第一空余段51共同形成在大臂一级同步带813轮81内侧的安装空间,即扩大避位间隙,可更好地为大臂二级同步带823轮82提供安装位置,提高结构的紧凑性;相应地,第二安装座213a向与第一承载件212相反的一侧凸出,其可与上述的第二空余段52共同形成在小臂一级同步带913轮91内侧的安装空间,即扩大避位间隙,可更好的为小臂二级同步带923轮92提供安装位置,进一步提高结构的紧凑性。
144.在一较佳实施例中,参照图21和图22,大臂传动轴83包括位于其末端位置处的第一安装段831,大臂二级主动轮821位于第一安装段831上,大臂一级从动轮812的中间区域设有第一螺纹通孔,大臂传动轴83的末端面设有与第一螺纹通孔相适配的第一螺纹孔;
145.小臂传动轴93包括位于其末端位置处的第二安装段931,小臂二级主动轮921位于第二安装段931上,小臂一级从动轮912的中间区域设有第二螺纹通孔,小臂传动轴93的末端面设有与第二螺纹通孔相适配的第二螺纹孔。
146.本实施例中,大臂二级主动轮821固定套设于大臂传动轴83的第一安装段831上,该第一安装段831位于大臂传动轴83的末端位置处,而大臂一级从动轮812通过螺栓锁定在大臂传动轴83的末端面,即大臂二级主动轮821位于大臂一级从动轮812的内侧;小臂二级主动轮921固定套设于小臂传动轴93的第二安装段931上,该第二安装段931位于大臂传动轴83的末端位置处,而小臂一级从动轮912通过螺栓锁定在小臂传动轴93的末端面,也即小臂二级主动轮921位于小臂一级从动轮912的内侧,结构简单,设置稳固且拆装方便。
147.在一较佳实施例中,参照图21和图22,第一承载件212上设有第一通孔、与第一通孔对应布置的第一固定座214和位于第一固定座214上的两第一轴承215,第一固定座214上
设有第一轴承安装孔,两第一轴承215间隔布置在第一轴承安装孔内,大臂传动轴83穿过第一通孔设置,大臂传动轴83还包括与两第一轴承215的内环过盈配合的第一连接段43,第一连接段43上设有位于两第一轴承215之间的第一轴套216;
148.第二承载件213上设有第二通孔、与第二通孔对应布置的第二固定座217和位于第二固定座217上的两第二轴承218,第二固定座217上设有第二轴承安装孔,两第二轴承218间隔布置在第二轴承安装孔内,小臂传动轴93穿过第二通孔设置,小臂传动轴93还包括与两第二轴承218的内环过盈配合的第二连接段43,第二连接段43上设有位于两第二轴承218之间的第二轴套219。
149.本实施例中,第一承载件212上的第一通孔孔径大于大臂传动轴83的轴径,大臂传动轴83穿过第一通孔,其两端分别位于第一承载件212的两侧,并且,大臂传动轴83通过两第一轴承215与第一固定座214转动配合,并通过第一固定座214固定在第一承载件212上。第二承载件213上的第二通孔孔径大于小臂传动轴93的轴径,小臂传动轴93穿过第二通孔,其两端分别位于第二承载件213的两侧,并且,小臂传动轴93通过两第二轴承218与第二固定座217转动配合,并通过第二固定座217固定在第二承载件213上。此外,两第一轴承215通过第一轴套216间隔限位,两第二轴承218通过第二轴套219间隔限位。通过上述结构设置,大臂传动轴83和小臂传动轴93转动稳定,拆装简单,方便维护。
150.在一较佳实施例中,参照图21和图22,第一承载件212上设有第三轴承安装孔和位于第三轴承安装孔内的第三轴承21a,大臂驱动轴84与第三轴承21a的内环过盈配合;
151.第二承载件213上还设有第四轴承安装孔、位于第四轴承安装孔内的第四轴承21b和与第四轴承21b的内环过盈配合的大臂从动转轴85,大臂从动转轴85上设有第五轴承安装孔和位于第五轴承安装孔内的第五轴承21c,小臂驱动轴94与第五轴承21c的内环过盈配合且其两端从第五轴承安装孔中穿出。
152.本实施例中,大臂驱动轴84通过第三轴承21a安装在第一承载件212上,大臂从动转轴85通过第四轴承21b安装在第二承载件213上,其与大臂500连接或一体成型以配合大臂驱动轴84实现大臂500在基座21上的转动,小臂驱动轴84通过第五轴承21c安装在大臂从动转轴85上,且与大臂从动转轴85为同一轴线布置,即采用“轴中轴”的设置形式,小臂驱动轴84可在大臂从动转轴85上转动,且与大臂从动转轴85在基座21上的转动不相干扰,结构设计巧妙且紧凑,配合稳定。
153.在一较佳实施例中,参照图21和图22,第一承载件212上还设有对应第三轴承安装孔布置的第一环形盖板21d,第一环形盖板21d与第三轴承21a的外环抵接,大臂二级从动轮822的中间区域设有多个第三螺纹通孔,大臂驱动轴84的末端面设有与第三螺纹通孔相适配的第三螺纹孔;
154.第二承载件213上还设有对应第四轴承安装孔布置的第二环形盖板21e,第二环形盖板21e与第四轴承21b的外环抵接,大臂从动转轴85上还设有对应第五轴承安装孔布置的第三环形盖板21f,第三环形盖板21f与第五轴承21c的外环抵接,小臂二级从动轮922的中间区域设有第四螺纹通孔,小臂驱动轴921的末端面设有与第四螺纹通孔相适配的第四螺纹孔。
155.本实施例中,通过环形盖板对应抵持轴承,可避免轴承从各自的轴承安装孔内滑出,从而增加安装稳定性,并且还可阻挡其他杂质进入轴承内而影响其转动。另外,大臂二
级从动轮通过螺栓锁定在大臂驱动轴的末端面,以及小臂二级从动轮通过螺栓锁定在小臂驱动轴的末端面,连接稳固,拆装方便。
156.在一较佳实施例中,参照图14,桌面机械臂驱动结构还包括:执行电机1000;执行电机1000为伺服电机,执行电机1000包括绝对值编码器以及电磁抱闸器,电磁抱闸器为断电抱闸的电磁抱闸器。
157.在一较佳实施例中,桌面机械臂还包括:控制板;控制板分别和转台驱动电机3、大臂驱动电机5、小臂驱动电机6以及执行电机1000电连接。
158.参照图23,本发明进一步提出的一种桌面机械臂包括桌面机械臂驱动结构,该桌面机械臂驱动结构的具体结构参照上述各实施例,由于桌面机械臂采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
159.本发明还提出一种机器人,该机器人包括桌面机械臂,桌面机械臂包括前述各实施例所记载的桌面机械臂驱动结构,由于机器人采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
160.以上所述的仅为本发明的部分或优选实施例,无论是文字还是附图都不能因此限制本发明保护的范围,凡是在与本发明一个整体的构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。