1.本发明涉及地下废弃管道处理领域,尤其涉及一种污水管线的灌浆移除方法。
背景技术:
2.近年来,随着中国城市化进程的快速推进,钻孔灌注桩以其适应性强、成本适中、施工简便等特点,被广泛应用于各种工程领域中。在地铁及旧城改扩建等工程施工中,深埋地下的废弃污水管道不可避免地给钻孔灌注桩施工带来较大的困难,若不处理,则会造成混凝土大量流失,难以成桩,严重影响钻孔灌注桩的质量及成本。
3.目前,钻孔灌注桩施工遇到地下废弃污水管道时常用的处理方法一般有两种,一种是采用灌浆的方法予以清除,先采用旋挖钻机穿透地下污水管道,直接从钻孔向污水管道倒入泥浆等填充物至与地面齐平;另一种是采用避免混凝土流失的方法,即采用旋挖钻机穿透地下污水管道,从旋挖钻孔钻孔放入带有钢筋笼,在钢筋笼与地下深埋污水管道的交接处包覆有防止浇筑混凝土流失的外模,使得灌注桩施工不受污水管道的影响。
4.cn110792441b提供一种处理深埋跨基坑废弃管道的施工方法,包括:s1)在施工区域勘测废弃管道的埋设位置,放样基坑的预设围护结构的施工廓形;s2)在施工面上标记出废弃管道的管道投影;s3)确定出预设围护侧墙与管道投影的交叉位置并进行标记;s4)在管道投影内分别执行旋挖钻孔施工以清除废弃管道,同时形成旋挖孔,回填旋挖孔至与施工面齐平;s5)在交叉位置处执行旋挖钻孔施工以清除废弃管道,同时形成交叉旋挖孔,回填交叉旋挖孔至与所述施工面齐平。该方法在无需开挖提取废弃管道的情况下高效的清除埋深较大的废弃管道,避免了因废弃管道埋深过深、施工场地狭小等原因给处理横跨地铁车站基坑的废弃管道带来的不便,提高了地铁车站的施工效率。
5.cn110820728a公开了一种穿越地下深埋废弃管道的钻孔灌注桩施工方法,所述施工方法包括如下具体步骤:步骤1:进行地下深埋废弃管道的管线探测及现场调查;步骤2:进行桩位放样,埋设护筒,采用旋挖钻机钻孔;步骤3:制作钢筋笼;步骤4:进行钻孔灌注桩的清孔,下放钢筋笼,再进行混凝土的浇筑作业。本发明所述钻孔灌注桩施工方法通过在钢筋笼的外围设置外模,实现了对地下深埋废弃管道的封堵,使地下深埋废弃管道不影响桩孔的灌注作业。
6.然而,现有技术对污水管道的处理过程存在以下问题:由于污水管道处于地表深处,仅依靠灌浆作业时泥浆的自然流动能力,不能将污水管道内部空间完全填充,遗留下的未填充部分随着时间的推移最终会被腐蚀坍塌,造成沉降,特别是在河流或公路铁路穿越处,可能会因此损坏道路;且作业人员不能掌握管道的灌浆情况,仅能凭借是否灌满至通道口判断是否将污水管道灌满,对灌浆过程中地下的污水管道状态无法了解,缺乏监督和调控措施。现有技术仍然有需要改进的至少一个或几个方面。
7.此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于发明人做出本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申
请人保留在背景技术中增加相关现有技术之权利。
技术实现要素:
8.针对现有技术之不足,本发明提供了一种污水管线的灌浆移除方法,通过对灌浆过程中泥浆流动状态的可视化检测和处理,实现了对地下深埋的污水管线能够灌浆充分,不会由于污水管线存在内部未填充空间导致的沉降或影响施工。
9.为实现上述目的,本发明提供了一种污水管线的灌浆移除方法,至少包括两个步骤:(a)制作污水管线的灌浆移除过程中污水管道内泥浆的动态模拟图像,所述动态模拟图像由模拟模块基于第一监测单元传输的数据制成;(b)在污水管线内布设能够基于动态模拟图像中泥浆流动情况在操作装置的控制下进行移动的搅拌模块。
10.优选地,模拟模块至少能够基于设置于污水管道的内部的第一监测单元的检测或采集数据驱动二维模拟服务器将至少包含有泥浆流动情况的二维图形和与之对应的属性数据的二维模拟图像显示于操作装置,和/或驱动三维模拟服务器将泥浆流动情况按照与二维模拟服务器示出的二维模拟图像相关联的方式所形成的与污水管线的灌浆移除的实时运行状态相关的三维模拟图像显示于操作装置。
11.优选地,搅拌模块上设置有具有定位标记的功能的定位组件,使得在搅拌模块于污水管道空间内部移动时,与污水管道的实时位置有关的数据能够通过定位组件传输至操作装置,并以图像的方式显示于操作装置。
12.优选地,搅拌模块还包括振动组件和移动组件,振动组件能够在污水管道进行灌浆作业时基于内部设置的偏心质量转轴在高速旋转时产生的离心力通过轴承传递给搅拌模块壳体,使得搅拌模块能够将污水管道内灌注的泥浆充分搅拌,铺设均匀,且振动组件能够基于模拟模块显示到操作装置上的二维和/或三维图像上所处位置泥浆的流动情况通过改变偏心质量转轴的旋转速度调整振动组件的振动频率。
13.优选地,移动组件包括推进单元和调向单元,推进单元能够基于内部设置的电机推动搅拌模块向前移动,调向单元包括水平调向单元和垂直调向单元,所述调向装置能够基于水平调向装置和/或垂直调向装置,对移动组件的水平和/或垂直运动方向进行调整,移动组件能够基于模拟模块显示到操作装置上的二维和/或三维图像上的泥浆流动情况通过改变电机输出速率和调整调向单元的方式驱动搅拌模块移动到泥浆流动不均匀的地方。
14.优选地,搅拌模块和第一监测单元能够基于振动导线和监测导线在完成污水管线的灌浆移除过程后从回转转机预先挖掘的通道拉出。进一步地,为防止灌浆过程中泥浆流动对振动导线和监测导线的影响,将振动导线和监测导线穿过远小于通道直径的贯穿通道的金属管道,金属管道的直径应根据不会对泥浆灌入产生较大影响,也不会对振动导线的收放造成影响的方式进行选择。
15.优选地,二维模拟服务器输出的二维模拟图像与三维模拟服务器输出的三维模拟图像彼此关联,以使得所述二维和/或三维模拟图像其中一方所包含的污水管道管段或污水管道内部的搅拌模块被选取之时,另一方中与之对应的污水管道管段或污水管道内部的搅拌模块将被同步定位和/或标记。
16.优选地,污水管道内部的管段被赋予按照预设定义规则所设定的统一编码,且统一编码与设置在相应管段上的第一监测单元的设备编号彼此对应,其中,在通过二维模拟
服务器和三维模拟服务器对污水管线的灌浆移除过程进行实时动态模拟时,能够调用污水管道各管段对应的编码和/或与污水管道各管段对应的第一监测单元的设备编号以获取至少包含有污水管道各管段的泥浆的流动情况的二维/三维图形从而完成对污水管线的灌浆移除过程中各管段的模拟成像。
17.优选地,二维模拟服务器和/或三维模拟服务器能够响应于污水管线的灌浆移除过程的属性信息的改变而同步更新其图像以及与该图像对应的属性信息,以使得二维模拟服务器和/或三维模拟服务器能够按照保持图像及属性信息一致的方式显示污水管线的灌浆移除过程的动态模拟图像。
18.优选地,在通道地面端布置有用于进行灌浆作业时监测泥浆灌入时流速的第二监测单元,所述第二监测单元连接至操作装置,操作装置能够基于第二监测单元传输的流速数据控制灌浆车出浆速率。
19.优选地,振动导线地面线圈多余部分缠绕在线圈收束组件上,线圈收束组件能够基于二维/三维模拟图像上搅拌模块需要移动的距离,对振动导线进行收束和放出,使得搅拌模块不会因位移中带入大量振动导线导致打结或由于拖动大量振动导线影响搅拌效果。
20.优选地,虚拟模块能够基于对用于描述污水管线的灌浆移除过程的泥浆流动所述时间维度的不同划分为一号虚拟单元和二号虚拟单元,用以分别处理现实数据库和过往数据库,通过对比现实数据库和过往数据库判断泥浆流动状态。
21.优选地,当污水管线的灌浆移除作业灌注完成后,可通过线圈收束组件55收束振动导线54的方式将污水管道内的搅拌模块(50)从通道11拉出,第一监测单元30在完成对污水管道10的内的泥浆温度变化监测后,由监测导线301从污水管道10与通道11的连接处拉出,此时已完成对泥浆的充分流动处理和凝固程度监督,此时的污水管线在内部填满凝固的泥浆的支撑下,不会发生空洞和垮塌,污水管线的灌浆过程结束,将两侧用于封堵的钢板进行拆除和对通道进行封闭处理后,即可排除污水管线对施工过程的影响。
22.优选地,第一监测单元30能够将泥浆的灌浆移除过程中不同位置泥浆的温度数据传输至模拟模块31,模拟模块31基于第一监测单元30传输的温度数据建立等温图输出至操作装置20,使得操作模块31能够基于对比过往数据库的等温图判断现实过程中泥浆的凝固情况。
附图说明
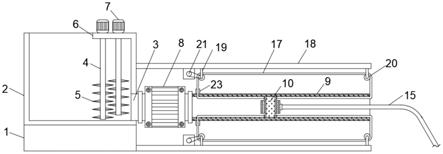
23.图1是根据本发明所示出一种污水管线的灌浆移除方法优选的工作时侧视结构图;
24.图2是根据本发明所示出一种污水管线的灌浆移除方法优选的控制原理图;
25.图3是一种优选地搅拌模块结构示意图。
26.附图标记列表
27.10:污水管道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:操作装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30:第一监测单元
28.40:第二监测单元
ꢀꢀꢀꢀꢀ
50:搅拌模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31:模拟模块
29.51:定位组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52:振动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53:移动组件
30.54:振动导线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
55:线圈收束组件
ꢀꢀꢀꢀꢀ
11:通道
31.301:监测导线
ꢀꢀꢀꢀꢀꢀꢀꢀ
111:钢管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112:保护套管
32.60:钢板
具体实施方式
33.下面结合附图1
‑
3进行详细说明。
34.在本发明的描述中,需要理解的是,若出现术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
35.在本发明的描述中,需要理解的是,“第一方向”是指平行于轴线x的方向,“第二方向”是指平行于轴线y的方向,“第三方向”是指平行于轴线z的方向。
36.本发明提供了一种污水管线的灌浆移除方法,该污水管线的灌浆移除方法至少包括两个步骤:(a)制作污水管线的灌浆移除过程中污水管道10内泥浆流动情况的动态模拟图像,上述动态模拟图像由模拟模块31基于第一监测单元30传输的数据制成;(b)在污水管线内布设能够基于动态模拟图像中泥浆流动情况在操作装置20的控制下进行移动的搅拌模块50。
37.开始污水管线的灌浆移除前,应先进行以下准备工作:
38.s1.对地下深埋污水管道的现场探测,确定污水管道与地面的关系;
39.s2.使用钢板在垂直于地表面方向插入污水管道,将需要灌浆移除的污水管线两端封闭阻挡。
40.污水管线的灌浆移除方法可分为以下几个步骤:
41.(a)对污水管道10在竖直方向上离地面最近的位置进行定位,从该位置使用旋转转机在垂直于地表方向钻穿污水管道上方。
42.(b)采用与钻穿的通道11直径相同的钢管111对通道壁进行固定。
43.(c)在通道11地面端设置第二监测单元40。
44.(d)提前从通道11向污水管道10内放入第一监测单元30和搅拌模块50。
45.(e)由通道11向污水管道10内灌注泥浆。
46.(f)根据显示在操作装置20上模拟模块31基于第一监测单元30实时传输的数据建立的动态模拟图像,由操作装置31对比以往数据分析判断泥浆流动情况后控制搅拌模块50的移动组件53以及振动组件52,对泥浆流动不充分的地方进行搅拌。
47.(g)根据显示在操作装置20上的第二监测单元40检测的泥浆灌入速率,及时调整灌浆车出浆速率。
48.根据一种优选实施方式,选择合适大小的钻头从地面垂直向下旋转挖掘出一个与地下污水管道内部空间相连通的通道11,对通道11的直径和长度进行测量,选择配合通道11直径和长度的钢管111紧贴通道11内壁插入,对通道11进行加固以防止在泥浆倒入过程中发生通道堵塞,地面上设置有能够限制钢管111上下滑动的固定装置,优选地,固定装置可以是与钢管111一体化生成的突出限位固定块。
49.根据一种优选实施方式,在通道11地面端布置有用于进行灌浆作业时监测泥浆灌入时流速的第二监测单元34,提前使用第二监测单元34对污水管线的灌浆移除前泥浆在通
道11中的最大流速进行测量,第二监测单元34连接至操作装置20,操作装置20能够将第二监测单元传输的最大流速数据进行记录和储存,在进行污水管线的灌浆移除时,第二监测单元34能够将泥浆在通道11中的流速实时传输到操作装置20,操作装置20能够基于预先测量的泥浆倒入最大流速控制灌浆车的泥浆出浆速率。
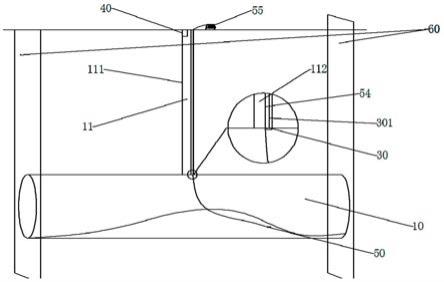
50.根据一种优选实施方式,正式开始污水管线的灌浆移除作业前,先从通道11向污水管道内部放设第一监测单元30和搅拌模块50,第一监测单元30通过监测导线301连接至模拟模块31,搅拌模块50通过振动导线54连接至操作装置20,为防止灌浆过程中泥浆对监测导线301和振动导线54的冲刷影响,将监测导线301和振动导线54提前穿过保护套管112,保护套管112的直径按照不影响泥浆灌注速率且不影响振动导线54在保护套管内的上下自由收放进行选择。
51.根据一种优选实施方式,第一监测单元30能够在振动导线54的连接下放设到污水管道10与通道11连接处,使得第一监测单元30能够对污水管线的灌浆移除过程中泥浆流动情况进行全程监测监控,可选地,第一监测单元30可以为光学距离传感器、红外距离传感器、超声波距离传感器等多种距离传感器中的一种或其结合。具体地,由第一检测单元30发出的声波或光束在接触到一定泥浆表面后返回至第一监测单元30内的信号接收单元,通过计算声波或光束从出射到返回所经历的时间,从而获取泥浆流动情况和泥浆至污水管道内壁的距离。进一步地,基于第一监测单元30对泥浆流动的监测结果,可建立与污水管线的灌浆移除过程中泥浆与污水管道内壁距离相关的二维和/三维图像。优选地,在大多数情况下,与污水管道所处位置和管道轴心方向的二维和/或三维图像可能是已知的,例如,对于已知确定的待灌浆移除的污水管道,其应有与之对应的二维布置图纸和三维立体图纸。
52.根据一种优选实施方式,搅拌模块50包括定位组件51,定位组件51可以是gps定位、wifi定位或glonass定位等。当搅拌模块50在污水管道内部空间移动时,其实时的运动位置数据可以通过定位组件51以无线传输的方式传输至操作装置20,并通过操作装置20以二维和/或三维图像的方式展示给操作者。
53.根据一种优选实施方式,搅拌模块50还包括振动组件52和移动组件53,振动组件52能够在污水管道进行灌浆作业时基于内部设置的偏心质量转轴在高速旋转时产生的离心力通过轴承传递给搅拌模块50壳体,带动搅拌模块50产生沿快速改变不同方向持续的细微位移,使得搅拌模块50能够所处位置的泥浆充分搅拌,铺设均匀。优选地,操作模块20能够基于模拟模块31显示到操作装置20上的二维和/或三维图像的泥浆流动情况,对搅拌模块50所处位置的泥浆流动情况进行判断,进一步地对振动组件52的偏心质量转轴的旋转速度进行调整,从而改变振动组件52的振动频率以应对搅拌模块50所处位置的不同泥浆流动情况。例如,搅拌模块50处于泥浆堆积流动不充分的位置,第一监测单元30能够获取相关数据实时传输到模拟模块31,模拟模块31通过驱动二维和/三维服务器将泥浆流动情况的二维图形和/或三维图像输出,操作装置20能够根据搅拌模块50所处泥浆堆积处与污水管道的距离区别与泥浆堆积周围与污水管道的距离,判断此处存在泥浆堆积现象,进一步的,加快振动组件52的偏心质量转轴的旋转速度,实现搅拌模块50对泥浆堆积处的加速搅拌。
54.根据一种优选实施方式,移动组件53包括推进单元和调向单元,推进单元能够基于搅拌模块50内部设置的电机推动搅拌模块50向前移动,例如,推进单元可以是设置在搅拌模块50周侧的螺旋桨,推杆或履带等传动装置组成。调向单元包括水平调向单元和垂直
调向单元,所述调向装置能够基于水平调向装置和/或垂直调向装置,对移动组件的水平和/或垂直运动方向进行调整,所述移动组件53能够基于模拟模块输出到操作装置20上的二维和/或三维图像上的泥浆流动情况通过改变电机输出速率和调整调向装置的方式驱动搅拌模块50移动到泥浆流动不均匀的地方。例如,水平调向单元为两个可沿第二方向摆动的浆板,垂直调向单元为两个可沿第一方向旋转的浆板,通过调整浆板与泥浆的作用面积改变搅拌模块50的移动方向,具体可参见cn103434642a。
55.根据一种优选实施方式,振动导线54在地面连接至操作装置的导线通过缠绕在线圈收束组件55后再连入操作装置20,振动导线54伸入污水管线的灌浆移除过程中的泥浆的长度能够通过线圈收束组件55基于操作装置20上二维和/或三维图像上对应搅拌模块50需要移动的距离将多余导线缠绕至线圈收束组件55或将需要的导线从线圈收束组件上释放,使得搅拌模块50在移动搅拌过程中不会带入过长振动导线54进入泥浆,造成线圈打结或影响搅拌效果。
56.根据一种优选实施方式,线圈收束组件55由转轴和控制转轴旋转的电机组成,电机连接至操作装置,电机能够基于操作装置20对搅拌模块50的位移距离的计算控制转轴的旋转方向和旋转速率从而对振动导线54进入泥浆的长度进行控制。例如,操作装置20驱动搅拌单元向距离通道11更远的目标位置时,操作装置20会根据二维/三维图像上搅拌装置50与目标位置的三维坐标计算搅拌装置50与目标间的距离,进一步地控制线圈收束组件55释放相对应长度的振动导线54,对应的操作装置20驱动搅拌单元向距离通道更近的目标位置时,操作装置20会根据二维/三维图像上搅拌装置50与目标位置的三维坐标计算搅拌装置50与目标间的距离,进一步地控制线圈收束组件55收缩相对应长度的振动导线54,从而避免多余振动导线54被搅拌装置50拖动打结或者影响搅拌效果。
57.根据一种优选实施方式,虚拟模块31能够基于对用于描述污水管线的灌浆移除过程的泥浆流动所处的时间维度不同划分为一号虚拟模块和二号虚拟模块,用以分别处理现实数据库和过往数据库,模拟模块31通过调动现实数据库与过往数据库中的污水管线的灌浆移除过程中泥浆流动状况,判断现实中的泥浆流动情况。例如,根据以往数据库中充分灌注的泥浆状态时的物理参数(如泥浆流动速度,泥浆表面平整度等)判断现实污水管线的灌浆移除过程中的泥浆是否存在灌浆不及时或者泥浆流动不充分导致聚集等情况。
58.根据一种优选实时方式,在操作装置中预先设置灌浆的时间,模拟模块31能够基于第一监测单元30监测的污水管线的灌浆移除过程中的泥浆流动速度,基于二维和/或三维模拟图像计算污水管线的灌浆移除所需要的灌浆的实际时间,对比预先设置的灌浆时间,如果发生时间灌浆时间大于预先设置的灌浆时间的情况,操作装置20将基于不超过第二监测单元(40)提前测量过的最大流速的基础上,加快灌浆车出浆速率,通过加快振动组件的振动频率和加快推进单元的移动速率达到提升搅拌模块50效率的作用,使得实际灌浆时间尽可能地小于预设灌浆时间。
59.根据一种优选实施方式,基于各监测单元对污水管线的灌浆移除过程的实时监测和采集数据,操作装置20能够通过二维模拟服务器对污水管线的灌浆移除过程的实时运行状态进行二维模拟。例如,基于定位组件51对搅拌模块50的定位标记结果,在基于第一检测单元102对周边环境的检测结果而建立的二维平面图中搅拌装置50的实时运动位置。优选地,在点击污水管线的灌浆移除过程图像并进一步将其放大查看时,能够以透视图的形式
显示其内部的泥浆流动情况和搅拌模块50。进一步地,操作装置20驱动三维模拟服务器按照与二维模拟服务器所输出的二维模拟图像相关联的方式对污水管线的灌浆移除过程的实时运行状态进行同步的三维模拟。优选地,二维模拟服务器和三维模拟服务器可搭载于应用中。进一步地,二维模拟服务器和三维模拟服务器各自输出的模拟图像均能通过操作装置20输出,以便于用户及时了解污水管线的灌浆移除过程的当前泥浆流动状态。
60.根据一种优选实施方式,污水管线的灌浆移除过程的各组件(包括搅拌模块和其他结构组成部件)被赋予按照预设定义规则所设定的统一编码。优选地,各编码对应唯一的部件,且运动部件的统一编码可与设置在相应运动部件上的设备编号相互对应。在通过二维模拟服务器和三维模拟服务器对污水管线的灌浆移除过程进行实时动态模拟时,可调用各部件对应的编码以至少获取相应运动部件的二维/三维图形组件以进一步用于模拟成像。另一方面,也可通过查找表的形式来调动与运动部件对应的设备编号来获取相应运动部件的图形组件以进一步用于污水管线的灌浆移除过程内的模拟成像。优选地,二维模拟服务器和三维模拟服务器所调用的编码是唯一且相同的。
61.优选地,在利用二维模拟服务器和三维模拟服务器对污水管线的灌浆移除过程进行实时动态模拟时,只需要通过调用与污水管线的灌浆移除过程的部件相关的编码和/或与其内部运动部件对应的设备编号即可,而不需要进行数据的搜索、分析筛选及匹配,从而节省大量的操作时间。其次,若需要通过查看由二维模拟服务器和三维模拟服务器模拟出的实时动态图像以获知装置的实时运行状态信息时,除直接点击二维模拟图像和/或三维模拟图像中所显示的污水管线的灌浆移除过程,之外,也可通过查找表的形式调用部件的编码或与运动部件对应的设备编号来定位至相关的部件,以进一步地查看污水管道10内部的泥浆流动的实时运行状态。
62.根据一种优选实施方式,二维模拟服务器能够通过二维模拟方式对污水管线的灌浆移除过程进行实时状态模拟,即能够将装置对应的图形组件和属性数据结合起来显示。例如,操作装置20能够基于第一监测单元30对污水管线的灌浆移除过程的定位标记数据驱使二维模拟服务器以诸如平面俯视图的形式显示污水管线的灌浆移除过程在污水管道10空间内的实时运行状态,并同时以诸如列表的形式输出与装置相关的属性数据,模拟结果能够通过操作装置20示出。在点击二维模拟图像中的污水管线的灌浆移除过程图像时,会显示污水管线的灌浆移除过程当前状态下的各项运行参数,包括但不限于其当前的泥浆流动的速度,泥浆流动的聚集情况,泥浆离污水管道内壁的距离,泥浆离通道口的距离等。进一步地,二维模拟服务器内预先储存有与污水管线的灌浆移除过程的结构组成、组件编号、设计参数及功能等相关的图形或数字信息。优选地,二维模拟服务器能够通过操作装置20输出与污水管线的灌浆移除过程的运行状态相关的所有变量的参数及其属性信息,并且在操作装置20检测到装置相关参数高于或低于标准阈值之时,以声/光的方式告知用户当前状态下可能存在的意外风险状况。
63.根据一种优选实施方式,操作装置20能够基于由设置于污水管线的灌浆移除过程内部的与各运动部件对应的传感器所检测和采集的数据来驱使三维模拟服务器显示模拟及同步更新污水管线的灌浆移除过程内部泥浆流动的实时运动状态变化。优选地,泥浆流动状态变化可以包括泥浆流动的聚集情况和流速情况。且泥浆流动的聚集情况和流速情况至少能够通过三维模拟服务器输出的关于泥浆流动状态的三维模拟图像示出。优选地,三
维模拟图像可以通过诸如画面频流的方式进行显示。例如,在通过操作装置20调节搅拌模块50电机的输出功率时,操作装置20能够同步驱动三维模拟服务器以使其适应搅拌模块50电机的输出功率变化。
64.根据一种优选实施方式,搅拌模块50和第一监测单元30在污水管线的灌浆移除过程完成后,由与搅拌模块50连接的振动导线54和与第一监测单元30连接的检测导线301从保护套管112拉出。
65.根据一种优选实施方式,通道11内布设有向污水管道10进行浇水养护的浇水设施(未示出),浇水设施由喷淋终端、阀门和供水管道组成。喷淋终端由能够控制喷淋方向的转轴和喷头组成。其中,操作装置20基于第一监测单元30传输的实时泥浆凝固状态与过往数据库后,判断泥浆凝固过程是否发生开裂,进一步地控制转轴向刚刚发生开裂的泥浆处喷射养护水,阻止泥浆发生更严重的开裂。例如,当泥浆凝固过程中发生开裂现象时,开裂处的实时状态会被第一监测单元30监测并传输至模拟模块31,模拟模块31对数据分析后将开裂结果以可视化的方式输出至操作装置20,操作装置通过对比过往数据库后判断开裂的严重性继而评估是否需要浇水养护,对于开裂严重的情况,操作装置20立即控制阀门打开,调整转轴的转动,使得喷头对准开裂处,对发生开裂的部位进行喷水养护以防止开裂进一步扩大。
66.根据一种优选实施方式,第一监测单元30能够将泥浆的灌浆移除过程中不同位置泥浆的温度数据传输至模拟模块31,模拟模块31基于第一监测单元30传输的温度数据建立等温图输出至操作装置20,使得操作模块31能够基于对比过往数据库的等温图判断现实过程中泥浆的凝固情况。具体的:模拟模块31基于第一监测单元30定时传输的温度数据将同一位置泥浆的温度变化情况传输至操作装置20,进一步地,操作装置20能够根据温度变化情况判断泥浆的凝固情况。例如,不同位置的泥浆由于所处位置和进入污水管道10的时间差异,凝固程度往往不一样,泥浆在凝固过程中会产生的热量也不一样,温度处于升高阶段部分的泥浆代表该处泥浆正处于凝固过程,温度处于下降部分的泥浆代表该处泥浆处于刚刚完成凝固冷却的泥浆,温度不变部分的泥浆则说明此处的泥浆已经完成凝固并冷却完全。
67.根据一种优选实施方式,当污水管线的灌浆移除作业灌注完成后,可通过线圈收束组件55收束振动导线54的方式将污水管道内的搅拌模块(50)从通道11拉出,第一监测单元30在完成对污水管道10的内的泥浆温度变化监测后,由监测导线301从污水管道10与通道11的连接处拉出,此时已完成对泥浆的充分流动处理和凝固程度监督,此时的污水管线在内部填满凝固的泥浆的支撑下,不会发生空洞和垮塌,污水管线的灌浆过程结束,将两侧用于封堵的钢板进行拆除和对通道进行封闭处理后,即可排除污水管线对施工过程的影响。
68.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。