1.本技术属于医疗器械技术领域,具体涉及基于影像和电生理实时定位的脑深部电极自动植入系统。
背景技术:
2.随着癫痫外科及功能神经外科在我国的迅速发展,使用深部脑电监测及神经调控的方式监测癫痫病灶或治疗功能神经外科疾病(如帕金森病等),已成为这两类过去难以治疗的疾病的主要治疗方式。神经外科医生希望通过立体定向方式将各类脑部电极(包括脑深部电刺激(dbs)电极、立体脑电监测(seeg)电极、射频及激光毁损电极等)精准地插入脑部特定目标结构(靶点),从而向电极尖端周围的脑组织结构发放电刺激、射频辐射或激光脉冲,进而影响脑部核团功能或毁损脑部结构,发挥治疗作用;或通过脑电监测电极记录周围脑组织的电生理活动,进而确定癫痫病灶范围,对癫痫外科手术方式的选择具有关键意义。目前的电极植入手术过程中,通常外科医生首先通过三维立体定位装置确定病人脑部的靶点位置,然后根据靶点位置在颅骨寻找合适的部位钻孔并切开脑膜,再将刺激或监测电极通过骨孔和脑膜缺口插入到相应的靶点位置,部分外科医生在电极植入过程中借助于电生理监测信号对最终植入位置进行人为判断。在这个过程中,穿刺靶点、穿刺路径、最终植入深度等与术后效果直接相关的关键因素的选择都是由外科医生根据经验决定,而整个电极植入过程则是由外科医生借助工具及手术器械完成,其植入精度的系统误差和随机误差均较大,出现人为错误的几率也较高;此外,由于手术操作需要一定空间,手术切口长度通常为5
‑
7cm、骨孔直径大小1.5
‑
2.0cm、脑膜切开区域直径约1.2
‑
1.5cm,因此这种手术仍具有一定损伤,且术后存在出现切口愈合不良、脑脊液漏等并发症的可能。目前也有研究在设置好靶点后通过机械臂替代手术医生操作进行电极植入,但切开头皮、钻孔等操作仍由手术医生完成,且依然存在植入后效果不佳的情况,其总手术时间甚至超过不借助机械臂的手术医生单独操作的时间。因此,对于脑深部电极植入进行治疗或监测这种对精度要求极高的手术,急需开发一种能够精确定位并完成电极精准植入的医疗设备,提升手术精度和自动化程度、减少人为和系统误差、降低手术创伤、减少手术时间。
技术实现要素:
3.本技术提出了基于影像和电生理实时定位的脑深部电极自动植入系统,根据影像靶点,在植入通路上通过探测脑电信号,最终在电极植入区域定位出效果最优的电极植入点,再将脑刺激电极植入该最终的电极植入点,实现电极的精准植入。
4.为实现上述目的,本技术提供了如下方案:
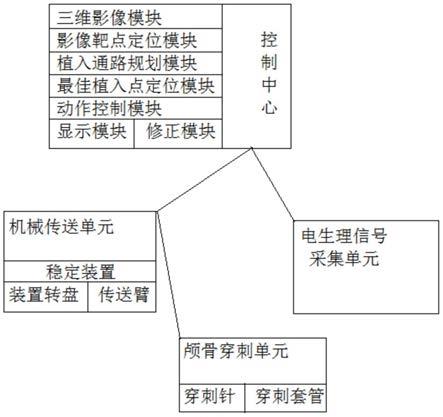
5.基于影像和电生理实时定位的脑深部电极自动植入系统,包括:控制中心、颅骨穿刺单元、电生理信号采集单元、机械传送单元;
6.所述颅骨穿刺单元用于对患者实施穿刺操作,所述穿刺操作包括对头皮、颅骨、脑膜实施切开、钻孔;
7.所述电生理信号采集单元用于采集脑深部电生理信号;
8.所述机械传送单元用于带动所述颅骨穿刺单元实施所述穿刺操作,以及带动所述电生理信号采集单元采集所述脑深部电生理信号,以及带动脑深部电极完成植入操作;
9.所述控制中心分别连接所述电生理信号采集单元和所述机械传送单元,所述控制中心用于根据患者脑部磁共振扫描图像生成脑部三维立体影像,并根据所述脑部三维立体影像生成影像靶点和虚拟植入通路,所述控制中心还用于根据患者脑深部核团的所述脑深部电生理信号得到最佳植入点和植入深度,所述控制中心还用于根据所述影像靶点和所述虚拟植入通路控制所述机械传送单元带动所述颅骨穿刺单元实施所述穿刺操作,以及带动所述电生理信号采集单元采集所述脑深部电生理信号,并根据所述最佳植入点和所述植入深度控制所述机械传送单元带动所述脑深部电极完成所述植入操作。
10.优选的,通过核磁共振影像采集设备获取所述脑部磁共振扫描图像。
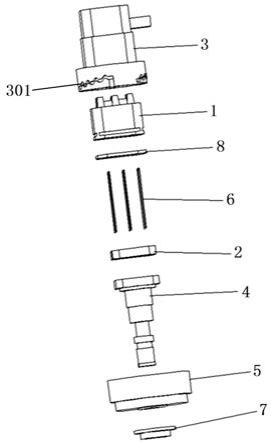
11.优选的,所述颅骨穿刺单元包括穿刺针和穿刺套管;
12.所述穿刺针位于所述穿刺套管内部;
13.所述穿刺针用于所述脑部穿刺操作,并带动所述穿刺套管前行;
14.所述穿刺套管用于形成脑深部电极植入通路。
15.优选的,所述控制中心包括三维影像模块、影像靶点定位模块、植入通路规划模块、最佳植入点定位模块、动作控制模块和显示模块;
16.所述三维影像模块用于根据患者所述脑部磁共振扫描图像生成所述脑部三维立体影像;
17.所述影像靶点定位模块用于根据所述脑部三维立体影像生成所述影像靶点,并将所述影像靶点显示在所述脑部三维立体影像中;
18.所述植入通路规划模块用于根据所述影像靶点生成所述虚拟植入通路,并将所述虚拟植入通路显示在所述脑部三维立体影像中;
19.所述最佳植入点定位模块用于根据所述脑深部电生理信号生成所述最佳植入点,并基于所述最佳植入点得到所述植入深度,所述植入靶点定位模块还用于将所述最佳植入点和所述植入深度显示在所述脑部三维立体影像中;
20.所述动作控制模块用于根据所述影像靶点和所述虚拟植入通路控制所述机械传送单元带动所述颅骨穿刺单元实施所述穿刺操作,以及带动所述电生理信号采集单元采集所述脑深部电生理信号,所述动作控制模块还用于根据所述最佳植入点和所述植入深度控制所述机械传送单元带动所述脑深部电极完成所述植入操作;
21.所述显示模块用于显示所述脑部三维立体影像、所述影像靶点、所述虚拟植入通路、所述最佳植入点和所述植入深度,以及显示脑深部核团的所述脑深部电生理信号的位置;所述显示模块还用于显示所述穿刺针在所述穿刺操作过程中,所述穿刺针在所述虚拟植入路径上的实时位置。
22.优选的,所述机械传送单元包括稳定装置和传送装置;
23.所述稳定装置用于所述机械传送单元与患者头部的稳定连接;
24.所述传送装置用于带动所述颅骨穿刺单元实施所述穿刺操作,以及带动所述电生理信号采集单元采集所述脑深部电生理信号,以及带动所述脑深部电极完成所述植入操作。
25.优选的,所述传送装置包括装置转盘和传送臂;
26.所述装置转盘用于放置所述颅骨穿刺单元、所述电生理信号采集单元和所述脑深部电极;
27.所述传送臂用于带动所述颅骨穿刺单元实施所述穿刺操作,以及带动所述电生理信号采集单元采集所述脑深部电生理信号,以及带动所述脑深部电极完成所述植入操作。
28.优选的,所述装置转盘还放置有微钻设备;
29.所述微钻设备用于在颅骨上实施开骨孔操作;
30.所述传送臂用于带动所述微钻设备实施所述开骨孔操作。
31.优选的,所述装置转盘还放置有电极固定装置;
32.所述电极固定装置用于固定所述脑深部电极;
33.所述传送臂用于带动所述电极固定装置固定所述脑深部电极。
34.本技术的有益效果为:
35.本技术公开了基于影像和电生理实时定位的脑深部电极自动植入系统,基于脑部三维立体影像自动获取影像靶点和虚拟植入通路,通过机械传送单元带动颅骨穿刺单元进行穿刺操作,然后通过电生理信号采集单元采集脑深部电生理信号,自动确定电极植入的最佳位置点并准确计算出植入深度,最终机械传送单元将脑深部电极准确植入最佳电极刺激点。本技术通过影像和电生理信号的双重定位,能够确定治疗效果最佳的电极植入点,通过机械传送单元实现电极的精准植入,有效保证了脑深部电刺激的手术精度,整个植入过程自动完成,无需人工参与,精度高。本技术具有广阔的推广空间和使用价值。
附图说明
36.为了更清楚地说明本技术的技术方案,下面对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
37.图1为本技术实施例基于影像和电生理实时定位的脑深部电极自动植入系统结构示意图;
38.图2为本技术实施例基于影像和电生理实时定位的脑深部电极自动植入系统的整体工作流程示意图。
具体实施方式
39.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
41.如图1所示,为本技术实施例基于影像和电生理实时定位的脑深部电极自动植入系统,包括:控制中心、颅骨穿刺单元、电生理信号采集单元、机械传送单元。
42.其中,所述颅骨穿刺单元用于对患者的头皮、颅骨、脑膜实施穿刺操作。
43.电生理信号采集单元用于采集脑深部电生理信号。
44.应当注意的是,由于目前的核磁共振扫描存在分辨率和信噪比等方面的局限性,在目前的脑部三维立体影像中还不能精准的确定一个最佳的脑深部电极植入点位置,只能根据一定的定位规则确定一个经验性的靶点位置,但在治疗效果上这个位置可能并不是最优靶点,因此,才导致电刺激效果有时候不能达到预期疗效的情况出现。
45.在本实施例中,采用核磁共振影像设备mri采集患者的脑部磁共振扫描图像,由控制中心的三维影像模块生成脑部三维立体影像,控制单元中的靶点定位模块导入该影像,借助于人工智能和机器学习技术自动确定影像靶点的位置,以丘脑底核作为靶点进行举例,这种定位方式与目前手术医生进行的定位方法相类似:将mri图像进行ai处理,自动识别红核最大截面所在的层面,在红核前缘水平切面的丘脑底核中点作为靶点,最后根据丘脑底核重心进行微调,即可确认影像靶点的位置。同时,通过人工智能算法识别颅骨冠状缝,在冠状缝前方0
‑
3cm、中线旁开2
‑
5cm区域选择入点并自动进行调整,使穿刺路径避开脑沟和脑室,尽量在脑实质内通过。进一步的,植入通路规划模块基于影像靶点的位置,生成虚拟植入通路,例如,通过mri图像可以形成三维成像,或者三轴切片图,进而形成虚拟通路。该虚拟植入通路是微钻装置在颅骨上开骨孔和穿刺针的穿刺规划路径,路径规划以避开脑部神经和血管为原则,且尽量最短。影像靶点和虚拟植入通路都会标记在脑部三维立体影像中,由手术医生确认靶点位置和植入路径满意后开始电极植入。但是,如前所述,影像靶点并不一定是手术效果最好的位置,在电极植入过程中需通过电生理监测手段,确立最终的电极植入位置。整个植入过程中,外科医生可直观获悉脑深部植入手术的植入点和穿刺路径情况,还可随时观察电极尖端位置及其周围解剖结构,便于更准确地解读电生理记录信号的定位信息。
46.进一步的,在控制中心中设计修正模块。毕竟,靶点定位模块和植入通路规划模块生成的影像靶点和虚拟植入通路,可能会存在一些无法规避的客观问题,例如患者头部的具体情况,所以,此时,外科医生可以通过修正模块,基于患者的实际情况,对影像靶点和虚拟植入通路做出相应的修正,以降低植入手术的风险。
47.机械传送单元在控制中心动作控制模块的控制下带动颅骨穿刺单元对患者的头皮、颅骨、硬膜实施切开、钻孔等穿刺操作。
48.现有的穿刺手术通常使用电凝针,在穿刺过程中凭借医生的手感找到脑硬膜,然后电凝穿透,这种方式完全依赖医生的经验,很容易出错或者产生并发症,甚至会损伤脑组织。在本实施例中,颅骨穿刺单元包括穿刺针和穿刺套管,均采用现有技术实施。其中,穿刺针位于穿刺套管内部。具体的,在控制中心动作控制模块的控制下,自动传动单元带动穿刺针沿虚拟植入通路向影像靶点行进,刺穿硬膜;当行进到影像靶点位置时,穿刺针从穿刺套管中退出,穿刺套管保留在原位,以形成脑深部电极植入通路。在本实施例中,进一步的,在穿刺针头部位置还安装有阻力回馈感应装置和电阻测定感应装置,阻力回馈感应装置可以探测诸如颅骨、肌肉、硬膜等不同弹性,电阻测定感应装置可测定颅骨、肌肉各层不同的电阻,以此可以有效避免损伤脑组织。
49.此时穿刺套管生成的电极植入通路,与先前设计的脑深部电极植入通路和影像靶点基本一致,但还不是最优的脑深部电极刺激点,如前所述,鉴于现在的医疗技术水平,还不能直接确立一个治疗效果最优的电极植入点。对此,在本实施例中,控制中心的动作控制
模块将控制机械传送单元带动电生理信号采集单元在穿刺套管中行进,在行进过程中,电生理信号采集单元实时采集穿刺通路周边的脑深部电生理信号,控制中心的植入靶点定位模块接收该脑深部电生理信号,结合人工智能算法生成最佳植入点,例如,在穿刺通道上自动记录单细胞放电和场电位放电信号,以前3
‑
5个能量低的位点作为基线,计算能量标准差,以超过此标准差4
‑
5倍电压的放电认定为单细胞放电,计算每个位点单细胞放电的均方根,计算单细胞放电平均值、实时放电频谱、时频能量图,以具有较稳定单细胞放电且全部电压值标准差超过基线值2
‑
2.5倍以上的位点作为核团位点,以核团内能谱中β震荡最明显的位点作为显效位点,宏电极放置位置需覆盖尽量多的核团部分,且必须覆盖显效位点所在的位置,此时得到到位置,即为最优的脑深部电极的植入位置,即最佳植入点。进一步的,可以计算出此时植入点的植入深度。最佳植入点和植入深度也同时经控制中心的显示模块显示在脑部三维立体影像中。进一步的,可以在控制中心设置修正模块,外科医生可通过修正模块观察该最佳植入点和植入深度,并予以人工核准。
50.在本实施例中,机械传送单元包括稳定装置和传送装置;稳定装置用于机械传送单元与患者头部的稳定连接,以确保植入手术不受患者头部移动的影响,并保证传送的稳定性和精度。传送装置用于带动颅骨穿刺单元实施穿刺操作,带动电生理信号采集单元采集电生理信号,以及带动脑深部电极完成植入操作。在本实施例中,采用装置转盘和传送臂结构,在装置转盘上放置手术中需要的装置或设备,例如前述的穿刺针和电生理信号采集单元、脑深部电极。传送臂按照手术顺序依次选取前述装置,实施相应的手术动作。所有的装置都在同一个传送臂的带动下实施手术动作,可以保证每次行进动作的数据一致。进一步的,在装置转盘上放置微钻设备,用于在颅骨上实施开骨孔操作,此时控制中心的动作控制模型将按照虚拟植入通路控制传送臂带动微钻设备实施开骨孔操作。进一步的,还可在装置转盘上放置电极固定装置,此时控制中心的动作控制模块将按照虚拟植入通路控制传送臂带动电极固定装置固定脑深部电极。
51.在整个电极植入过程中,控制中心的显示模块实时患者的脑部三维立体影像、影像靶点的位置、虚拟植入通路,以及实时显示电生理信号采集单元所采集的脑深部电生理信号的位置,和最终的最佳植入点的位置和植入深度,。
52.综上,本电极自动植入系统的整体工作流程可作如下表述:
53.如图2所示,首先,通过核磁共振影像设备采集患者脑部磁共振扫描图像;
54.基于患者脑部磁共振扫描图像生成患者的脑部三维立体影像,控制中心的靶点定位模块生成影像靶点,基于影像靶点,控制中心的植入通路规划模块生成虚拟植入通路;外科医生如果认为有必要,可以根据实际情况修正影像靶点和虚拟植入通路;
55.控制中心的动作控制模块根据影像靶点和虚拟植入通路,控制机械传送单元带动微钻装置在颅骨上实施开骨孔操作,并带动颅骨穿刺单元实施穿刺操作;
56.当颅骨穿刺单元沿虚拟植入通路抵达影像靶点后,退出穿刺套管,控制中心的动作控制模块控制机械传送单元带动电生理信号采集单元进入穿刺套管采集套管周边的脑深部电生理信号;
57.根据电生理信号采集单元采集到的脑深部电生理信号,控制中心的最佳植入点定位模块生成最佳植入点和植入深度;外科医生如果认为有必要,可以根据实际情况修正最佳植入点和植入深度;
58.控制中心的动作控制单元根据最佳植入点和植入深度控制机械传送单元带动脑深部电极完成植入操作;
59.控制中心的动作控制单元根据植入通路控制机械传送单元带动电极固定装置固定脑深部电极。
60.至此,从靶点初步定位
‑
脑穿刺
‑
精确定位
‑
脑刺激电极植入
‑
电极固定的全流程实现了全自动手术。
61.以上所述的实施例仅是对本技术优选方式进行的描述,并非对本技术的范围进行限定,在不脱离本技术设计精神的前提下,本领域普通技术人员对本技术的技术方案做出的各种变形和改进,均应落入本技术权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。