1.本发明涉及一种适于生产风力涡轮机叶片的至少一部分的模具。
背景技术:
2.风力涡轮机是公知的。其包括塔架和布置在塔架顶部的机舱。机舱包括毂,若干个,通常三个转子叶片附连到毂上。其与使毂旋转的流动的风相互作用。如所公知的,毂联接到用于产生电力的发电机。
3.风力涡轮机(相应地是转子)叶片是具有细长叶片主体的中空构造,该叶片主体具有通常为圆柱形的根部部段,通过该根部部段,叶片主体附连到毂上。根部部段之后是长叶片主体,其形状从根部到尖端发生显著变化,因为其从根部部段的圆柱形截面合并到翼型件截面,其然后延伸到尖端。
4.这种叶片由若干个叶片构建元件构成,叶片构建元件包括(除了其他之外)纤维腹板、木质或聚合物芯元件或带有翼梁帽的腹板等,这些构建元件嵌入在树脂基质中。通常,制造涡轮机叶片的两种不同方式是已知的。在第一替代方案中,叶片包括两个壳体,即,上壳体和下壳体,其单独地在相应的模具中制造,并且彼此附连以最终构建叶片。在第二替代方案中,为其设计了本发明模具,叶片以一步程序制造。在这一程序中,用于生产整个叶片的所有构建元件,如已经提到的纤维腹板、芯元件、腹板和翼梁帽等被放置在作为模具的一部分的相应壳体中,心轴被插入该构造中,用于填充该构造的内部空间,以避免树脂进入并填充叶片的中空内部。当所有的元件都布置好后,该构造就被灌注树脂,使得所有的元件以单步嵌入在树脂基质中。
5.为了生产这种风力涡轮机叶片,无论其是否是以单独的上壳体和下壳体等生产或者以一步程序生产,叶片设计,特别是考虑到叶片的长度,通常在涡轮机开发的早期阶段,在采用某些设计不确定性因素的非主要设计上规定。基于这种早期冻结设计,确定模具的几何形状,然后制造该模具来限定最终的叶片几何形状。考虑到叶片的长度,这种模具是非常复杂且特别长的构造,其需要被设计成承载最终生产的叶片或叶片部分的相对高的载荷。模具设计与叶片设计相适应。然而,在持久的开发过程中,叶片设计可能会在其设计和可能在特定载荷方面进行调适和成熟。因此,叶片设计可能会发生变化,尤其是在叶片长度方面。然而,这给先前确定的模具概念带来了问题,因为模具已经生产出来了。然后需要切割模具,并且需要构建和插入新的模具部件,以提供具有更新的几何形状的模具。因此,叶片的长度通常不会改变。
技术实现要素:
6.本发明的一个目的是提供一种用于生产风力涡轮机叶片的改进模具。
7.为了解决该问题,本发明提出了一种适于生产风力涡轮机叶片的模具,该模具包括:第一载体装置和壳体装置,壳体装置用于容纳叶片构建元件,叶片构建元件将嵌入树脂基质中以构建叶片主体部分,该壳体装置被放置在第一载体装置上;以及第二载体装置,该
第二载体装置的长度可改变并且使第一载体装置伸长,适于容纳预制叶片尖端,在构建叶片主体部分时预制叶片尖端将连接到叶片主体部分。
8.本发明提出了一种包括模块化载体装置的模具。载体装置包括第一载体装置和第二载体装置。在第一载体装置上,布置有包括一个或多个壳体元件的壳体装置。在这种壳体装置中,布置必要的叶片构建元件,如纤维腹板、芯元件、带翼梁帽的腹板等,这些元件对于构建叶片主体部分是必要的,叶片主体部分从根部部段开始并止于一部段,在该部段之后是尖端部段。这意味着,该叶片主体部分是使用模具通过渗透树脂将所有叶片构建元件嵌入树脂基质中以一步程序构建的。因此,叶片主体部分构建在壳体装置上,壳体装置搁置在第一载体装置上,因为叶片主体部分只是整个叶片的一部分,尽管其是主要部分。然而,其没有尖端部段,尖端部段不是在这个一步过程中生产的。叶片尖端是单独生产的,其是预制的,并在灌注树脂之前附连到竖立在壳体装置中的叶片构建元件构造上,以便通过机械连接和树脂灌注将叶片尖端牢固地连接到叶片主体部分。为了允许将预制尖端附连到叶片构建元件构造,本发明的模具包括第二载体装置,该第二载体装置附连到第一载体装置并使第一载体装置伸长。第二载体装置适于容纳预制的叶片尖端。
9.如上面所提到的,在持久的开发过程中,可能会出现需要更长的叶片。本发明的模具适于允许改变叶片设计(相应地是叶片长度),因为可以简单地改变模具设置(相应地是模具长度)。根据本发明,第二载体装置的长度是可变的,以允许修改载体装置的总长度,并且允许载体装置的长度适应最终确定的叶片长度。由于叶片尖端是预制的,所以通过调适附连到叶片构建元件构造上的叶片尖端的长度和通过调适用于精确支撑预制叶片尖端的第二载体装置的长度,可以简单地改变整个叶片的长度。
10.因此,本发明的模具允许通过根据预制叶片尖端的长度调适第二载体装置的长度以简单的方式改变整个模具长度。使用预制的叶片尖端还允许简单地改变叶片长度,因为使用本发明的模具更容易仅生产特定的叶片尖端,并保持在一步程序中构建的叶片主体部分的设置。
11.由于第二载体装置需要承载具有特定翼型件截面的预制叶片尖端,因此第二载体装置优选设置有用于容纳叶片尖端的特定支撑元件。支撑元件具有鞍状形状,该鞍状形状适配于叶片尖端的翼型件形状,使得叶片尖端以一种形状配合的方式布置在鞍状支撑元件上,其中的若干个鞍状支撑元件布置在第二载体装置上。
12.由于叶片尖端是一个预制物品,其连接到构建在壳体装置上的未灌注的叶片构建元件构造上,因此有必要将叶片尖端的位置精确地调节到叶片元件构造的位置,从而可以实现机械连接。为了将尖端布置在极佳位置,本发明提出将每个支撑元件连接到提升装置,提升装置用于改变支撑元件位置。提升装置允许调节每个支撑元件的高度位置(相应地是竖直位置),从而可以非常精确地调节叶片尖端的高度位置(相应地是竖直位置)。这是必要的,因为由于叶片尖端长度的变化,叶片尖端的总体形状(相应地是截面)也因尖端类型与尖端类型的不同而不同,使得需要经由支撑元件在载体装置侧进行调节。
13.每个提升装置优选地包括至少一个伸缩缸,优选地是液压缸或气压缸,其可以通过相应的控制装置非常精确地控制和调节。
14.在另一个实施例中,每个支撑元件的两端连接到单独的缸,每个缸是可单独控制的。除了高度调节之外,这还允许关于支撑元件倾斜的调节,该支撑元件可以绕第二载体装
置的纵向轴线稍微倾斜。可以升高或降低支撑元件的一侧,而另一侧保持不变,反之亦然,当然也可以升高或降低两个元件端部。任何种类的调节都是可能的,因为缸是可单独控制的。
15.如所提到的,本发明提出了长度可变的第二载体装置。为了实现这一中心发明思想,若干种替代方案是可行的。根据第一替代方案,本发明的模具包括若干个具有不同长度的第二载体装置,第二载体装置中的每一个可附连到第一载体装置。在该实施例中,模具(相应地是载体装置)是模块化的,并且除了第一载体装置之外,还包括至少两个,优选地更多的第二载体装置。载体装置具有不同的长度,并且优选包括不同数量的支撑元件。在每个不同的第二载体装置处的两个支撑元件之间的距离应该优选地是相同的,使得每个预制尖端以类似的方式支撑在相应变化的第二载体装置上。
16.如所提到的,每个第二载体装置连接到第一载体装置。为了允许标准化的连接方式,优选地,每个第二载体装置包括标准化的连接接口,用于将其连接到第一载体装置的连接接口。所有预制的第二载体装置具有相同的标准化的连接接口,其对应于第一连接装置处的适配连接接口。因此,无论附连哪个第二载体装置,将每个第二载体装置连接到第一载体装置的方式都是相同的。
17.由相应的连接接口实现的连接可以是法兰连接。这里,第一载体装置和每个第二载体装置都包括构建相应的连接接口的一个或若干个法兰,当第二载体装置就位时,这些法兰彼此抵接。法兰通过螺栓连接来固定,螺栓穿过法兰中的相应内孔延伸,并且相应的螺母拧在螺栓上以牢固地固定该连接。
18.在替代方案中,由相应的连接接口实现的每个连接可以是插入式连接。这里,连接是通过设置在第一载体装置和第二载体装置上的卡扣或闩锁连接元件来实现的。连接接口例如由相应的管状元件实现,例如第二载体装置的管状元件插入第一连接装置的管状元件中,并通过相互作用的卡扣或闩锁连接元件固定。
19.在第二载体装置的总体设置的第二替代方案中,第二载体装置可以包括可对准并可连接成一排的若干个载体元件,其中对准并连接的载体元件的数量是可变的,以改变第二载体装置的长度。同样在这里,模具(相应地是载体装置)是模块化的,而第二载体装置本身也是模块化装置,包括多个单独的载体元件。单独的载体元件对准成一排,并且被连接以构建第二载体装置。根据对准和连接的载体元件的数量,可以调节第二载体装置的总长度。因此,为了使第二载体装置伸长,只需要将一个、两个或更多个附加载体元件附连到已经对准和连接的载体元件上,或者当第二载体装置被缩短时,移除一个或多个对准和连接的载体元件。
20.优选地,每个载体元件包括至少一个鞍状支撑元件。该模块化第二载体装置的设计使得每个附加载体元件提供承载功能,因为其包括至少一个鞍状支撑元件。因此,利用每个附加的载体元件,提供了另一个支撑水平。
21.由于同样在该实施例中,单独的物品,即,载体元件彼此可移除地连接,因此在这里同样有利的是,每个载体元件包括标准化的连接接口,用于将其连接到相邻的载体元件或第一载体装置的连接接口。同样,提供了标准化的连接接口,使得可以容易地以相同的方式连接相应的载体元件。
22.通过相应的连接接口实现的连接是法兰连接或插入式连接。为了实现法兰连接,
每个载体元件包括具有内孔的相应法兰,使得两个相邻连接元件的抵接法兰可以通过包括螺栓和螺母的螺栓连接来固定。在实现插入式连接的情况下,载体元件包括相应的接合元件,如管状元件,其通过卡扣或闩锁连接元件固定。
23.根据关于第二载体装置的设置的第三替代方案,第二载体装置是伸缩装置,该伸缩装置可以通过以伸缩方式将其伸长和缩短来改变其长度。这里,第二载体装置不是模块化装置,而是包括以伸缩方式相互联接的一定数量的载体元件。可以将第二载体装置的长度从缩回的短位置改变到延伸的长位置,在缩回的短位置,所有载体元件尽可能地彼此靠近,在延伸的长位置,所有载体元件尽可能远地彼此远离。该实施例允许非常简单地调节长度,因为第二载体装置永久地附连到第一载体装置,并且该调节简单地通过自动伸缩第二载体装置来实现。不需要固定或松开机械连接。
24.载体装置优选地包括若干个载体元件,若干个载体元件以伸缩方式联接成一排并且可通过至少一个致动装置移动。该致动装置允许相应的载体元件的自动伸缩移动,并因此允许自动调节第二载体装置的长度。
25.优选地,载体元件被布置成使得当载体装置从缩回位置延伸到延伸位置时,载体元件一个接一个地移动,反之亦然。因此,当第二载体装置例如处于最短位置并且致动器被控制将其延伸时,第一载体装置被移动直到其相对于第二载体元件处于最大距离,然后第二载体元件也被移动直到其相对于第三载体装置处于最大距离,然后第三载体装置被移动等等。当第二载体装置被缩短时,运动是相反的方式,例如再次从第一载体装置开始,该第一载体装置向第二载体装置移动,等等。在一替代方案中,所有载体元件可以具有同步运动。这里,两个相邻载体元件之间的距离同步变化,并且在任何时候所有成对的载体元件之间的距离都是相同的。
26.致动装置优选是缸,例如可以是液压缸或气压缸。通过使用这样的缸,长度调节可以由相应的控制装置非常精确地控制。
27.最后,第一载体装置也可以包括布置和连接成一排的若干个第一载体装置。根据该实施例,第一载体装置也是模块化的,这允许在构建模具时容易地设置第一载体装置。
附图说明
28.从以下结合附图考虑的详细描述中,本发明的其他目的和特征将变得显而易见。然而,附图仅仅是为了说明的目的而设计的原理草图,并不限制本发明。附图示出:图1是本发明模具的原理图示,图2是本发明模具的第一实施例,其包括若干个具有不同长度的第二载体装置,图3是本发明模具的第二实施例,其具有模块化的第二载体装置,该模块化的第二载体装置包括若干个单独的载体元件,并且图4
‑
6是本发明模具的第三实施例,其包括可以伸缩方式变化的第二载体装置。
具体实施方式
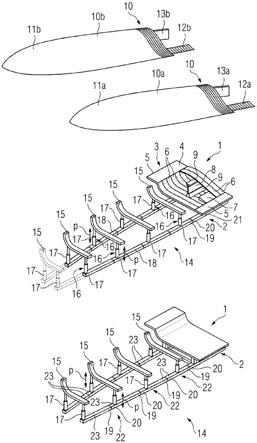
29.图1示出了本发明的模具1,其适于以一步灌注过程生产风力涡轮机叶片。模具1包括第一载体装置2,该第一载体装置2适于承载壳体装置3,该壳体装置3包括一个或多个单独的壳体元件4。壳体装置3(相应地是壳体元件4)包括相应的侧凸缘5,其利用侧凸缘5支撑
在第一载体装置2上。如所公知的,在该壳体装置3中,布置了必要的叶片构建元件,用于通过最终将叶片构建元件灌注和嵌入树脂基质中来构建叶片主体部分。这些叶片构建元件例如包括纤维腹板6,例如玻璃纤维腹板,其布置在壳体装置上并在叶片构建元件构造的上侧上方延伸。其还包括若干个芯元件7,芯元件7例如由聚合物、聚合物泡沫或木材制成,以及具有相应翼梁帽9的至少一个腹板8,如公知的,这些物品被纤维腹板6覆盖。这种叶片构建元件构造最终被嵌入树脂基质中,该树脂基质在真空灌注过程中施加。
30.第一载体装置2和壳体装置3仅用于构建叶片主体部分,该叶片主体部分从根部(未示出)延伸超过最终构建的叶片的显著长度,到达预制叶片尖端10附连到叶片构建元件构造的位置,如图1原理地所示。尖端是预制的,并且可以具有不同的长度,如图1中两个不同的尖端10a、10b所示。当完成时,尖端10a较短,最终导致较短的叶片,而尖端10b较长,导致较长的最终叶片。每个尖端10、10a、10b也由相应的叶片构建元件构建,如纤维垫、芯元件、腹板和翼梁帽等,这些叶片构建元件最终被灌注,处于树脂基质中,使得预制尖端10、10a、10b仅需要连接到构建在壳体装置3上的叶片主体部分。预制尖端10、10a、10b被定位并附连到未灌注的叶片元件构造上,如图1原理地所示。当其就位时,进行灌注,从而实现尖端10、10a、10b与最终构建的(相应地是灌注的)叶片主体部分的紧密机械连接。对于机械连接,尖端10、10a、10b例如包括相应的芯元件12a,或者连接元件13a、或者12b和13b,尖端通过芯元件和连接元件接合在壳体装置3上的叶片主体元件构造中,用于将其灌注,也处于相应的树脂基质中。
31.为了相对于壳体装置3上的叶片构建元件构造定位相应的尖端10、10a、10b,模具2包括长度可变的第二载体装置14。其包括若干个支撑元件15,支撑元件15具有鞍状形状,对应于相应的尖端10、10a、10b的截面(相应地是外形),用于将其以一种形状配合的支撑进行容纳。这保证了相应的预制的尖端10、10a、10b不能移动到侧部,而是只能在纵向方向上移动,以使其相对于叶片主体元件构造处于对准的轴向位置。
32.每个支撑件15的两端布置在相应的提升装置16上,提升装置16为相应的缸形式,例如液压缸或气压缸17,使得每个支撑件15可以在其高度位置(相应地是竖直位置)上进行调节。每个缸17可由相应的控制装置单独控制,只有一个控制装置优选地控制所有缸17。这允许相应的支撑件的准确高度调节,并因此允许预制尖端10、10a、10b的准确高度调节,同时一定的倾斜调节也是可能的,因为每个缸17可以被单独控制。
33.这种支撑件和缸构造布置在相应的框架元件18上,该框架元件18作为第二载体装置14的一部分,包括相应的连接接口19,相应的连接接口19将第二载体装置14连接到布置在第一载体装置2的相应框架元件21处的相应的连接接口20。
34.这允许移除第二载体装置并将其更换为另一个第二载体装置14,当叶片长度改变时,另一个第二载体装置14允许承载和调节比最初设计的尖端更短或更长的尖端。
35.图1示出了通过虚线示出的延伸部来改变第二载体装置14的长度的总体可能性。虽然用连续线示出的第二载体装置14适于承载尖端10a,但还包括用虚线示出的支撑件15和缸17的延伸的第二载体装置14适于承载更长的尖端10b,使得该更长的尖端也安全地被承载,并且可以在其整个长度上进行调节。
36.明显的是,改变第二载体装置14的长度的可能性允许根据关于叶片长度的任何设计变化来调节模具1的总长度。只需要改变第二载体装置2的长度,而不需要如现有技术中
所必需的通过切割预制模具等来改变整个模具设置的长度。
37.有若干个发明概念用于实现长度改变的可能性。第一实施例在图2中示出。图2示出了本发明模具1的原理图示,具有第一载体装置2和布置在第一载体装置2上的壳体装置3。其还示出了两个不同的第二载体装置14a和14b,其显然具有不同的长度。虽然第二载体装置14a包括四个鞍形支撑件15,附连到如箭头p所示的相应的高度调节缸17,但是更长的第二载体装置14b包括六个鞍状支撑元件15,每个鞍状支撑元件15连接到两个相应的高度调节缸。
38.为了将两个第二载体装置14a、14b连接到第一载体装置2,第二载体装置14a、14b包括标准化的连接接口19,该标准化的连接接口19与第一连接装置2处的标准化的连接接口20适配,使得将第二连接装置14a、14b中任一个连接到第一连接装置2的方式相同。连接接口19、20可以例如提供法兰连接或插入式连接等。
39.虽然图2仅示出了两个可更换的第二载体装置14a、14b,但是显然的是,还可以提供更多的可更换的第二载体装置,甚至更长或更短或者具有介于两者之间的长度。
40.图3示出了本发明模具1的第二实施例,其同样包括第一载体装置2和第二载体装置14,第一载体装置2上布置有壳体装置3,第二载体装置14同样通过相应的标准化的连接接口19、20附连到第一载体装置2。
41.在该实施例中,第二连接接口14是模块化的。其包括若干个数量的单独的载体元件22,每个载体元件22包括两个下框架元件23,相应的缸17附连到该下框架元件23。相应的支撑元件15再附连到缸17,使得其高度和倾斜度可调节。
42.每个单独的载体元件22包括相应的在一端的标准化的连接接口19和在另一端的标准化的连接接口20,以允许将任意数量的载体元件22对准和连接成一排,用于构建第二载体装置14。显然的是,通过改变对准和连接的载体元件22的数量,第二载体装置14的总长度可以根据将要承载的预制尖端10的最终长度调节到需要的长度。
43.在该实施例中,两个载体元件22被示出为单独于构成第二载体装置14的已连接的载体元件,这两个载体元件22可以例如被连接到最终的位于端部的载体元件22,或者可以在中间位置被集成在这一排中等。由于同样是例如法兰连接或插入式连接的标准化的连接接口19、20,所以可以容易地连接两个相邻的载体元件22,但是也可以松开两个连接的载体元件22,用于缩短第二载体元件14,或者用于将载体元件22集成在这一排的某处。
44.最后,图4
‑
6示出了本发明模具1的第三实施例。该模具同样包括第一载体装置2,该第一载体装置2同样仅部分示出,并且该第一载体装置2承载壳体装置3,该壳体装置3未示出。模具1还包括第二载体装置14,其长度可以通过以伸缩方式将其延伸和缩短来改变。在这个示例中,第二载体装置14包括五个载体元件22。每个载体元件22包括鞍状支撑件15、未示出的相应的缸17以及相应的框架元件23,通过框架元件23,载体元件以伸缩方式连接。每个框架元件23例如是管状元件,使得一个框架元件23接合到相邻的框架元件23中,使得其能够相对于彼此以伸缩方式移动。
45.还示出了致动器24,这里是液压缸或气压缸25的形式,具有连接到位于端部的(左)载体元件22的可移动杆26。
46.图4示出了处于缩回的短位置的伸缩第二载体装置14,所有载体元件22尽可能彼此靠近地移动。
47.图5示出了部分延伸形式的第二载体装置14。致动器24已经将第一载体元件和第二载体元件22(从左侧可见)推离其他载体元件22,使得第二载体装置14延伸。当杆26被推向左侧时,首先,第一载体元件22移动,直到其到达相对于相邻的第二载体元件22的最大距离,也就是说,当杆26进一步移动时,其自动与第一载体元件22一起移动。所有载体元件22例如通过相应的驱动销联接,使得在朝向彼此的特定相对位置,其自动地一起移动。
48.当杆26从图5所示的位置进一步延伸时,其他跟随的载体元件22也以伸缩方式延伸,直到其达到最终的延伸长度,例如如图6所示。
49.为了缩短第二载体装置14,致动器24拉动杆26,使得第一左载体元件22再次朝向相邻的第二载体元件22移动,直到其抵接第二载体元件22并将其带走,使得最终所有载体元件22能够再次移动回到小的缩回位置。
50.该实施例允许在不采取任何机械动作的情况下进行长度调节,因为长度可以通过控制致动器24来自动调节。
51.除了载体元件22的这种一个接一个地移动的伸缩联接之外,可以以其都同步移动并且都彼此同步间隔的方式将其连接,使得其都等距隔开,而不管第二载体装置14是多长或多短。这意味着该距离在移动过程中发生变化,但是在所有成对的载体元件22之间以相同的方式发生变化。
52.尽管已经参考优选实施例详细描述了本发明,但是本发明不限于所公开的示例,本领域技术人员能够在不脱离本发明的范围的情况下从这些示例中得出其他变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。