1.本发明涉及清洁机器人技术领域,特别是涉及一种擦拭清洁机器人及其控 制方法。
背景技术:
2.公共场所人员密集且流动性大,为各种致病源的散播提供了良好的媒介。 尤其对于医院、卫生院等医疗场所,各类传染性病源更加集中,若环境消毒清 洁不彻底将造成巨大的社会危害。目前,室内地面消毒清洁一般都是由人工完 成,不仅费时费力,而且清洁的时效性难以保证。随着消毒防疫工作量增加, 清洁范围广泛,清洁流程复杂,并且清洁人员存在感染风险,因此,亟需减少 人工参与,增强智能化清洁机器人的参与。
3.清洁机器人可以通过计算机编程来实现其对其进行清洁操作,而无需人工 干预,运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术, 是典型的高新技术综合体。目前,大多清洁机器人智能化程度低,遇到障碍时 往往需要人工协助处理,并且需要人工操控行走,达不到自主清洁的要求。此 外,大多擦拭清洁机器人清洁力度较低,影响清洁效果。
技术实现要素:
4.本发明的目的是提供一种擦拭清洁机器人及其控制方法,由机械臂搭载擦 拭组件,能够通过擦拭头对重点位置进行擦拭清洁,提高清洁力度,并且能够 自主导航定位,具有智能化程度高、移动灵活性高、工作范围广的特点。
5.为实现上述目的,本发明提供了如下方案:
6.一种擦拭清洁机器人,包括:机器人机身以及设置在机器人机身底部的行 走装置,所述机器人机身上设置有控制柜、双目相机、机械臂以及擦拭清洁装 置,所述擦拭清洁装置包括擦拭液罐以及与擦拭液罐相连通的擦拭组件,所述 擦拭组件设置在所述机械臂上,所述擦拭组件包括减速电机和擦拭头,所述减 速电机与所述擦拭头驱动连接,所述减速电机带动所述擦拭头旋转;所述机械 臂上还设置有视觉检测装置;
7.所述控制柜内设置有供电模块、pc机、plc控制器、机械臂控制器,所述 供电模块为机器人提供电能,所述pc机分别与所述行走装置、双目相机、视 觉检测装置、plc控制器、机械臂控制器连接;所述plc控制器与所述擦拭清 洁装置电性连接,所述机械臂控制器与所述机械臂连接。
8.可选的,所述行走装置为agv小车,所述agv小车包含agv控制模块, 所述agv控制模块与所述pc机电性连接。
9.可选的,所述机器人还包括监控摄像机和无线通信模块,所述监控摄像机 设置在所述机器人机身上,所述无线通信模块设置在控制柜内,所述监控摄像 机和无线通信模块分别与所述pc机连接,所述pc机通过所述无线通信模块与 后台监控服务器通信连接。
10.可选的,所述擦拭液罐通过供液管与所述擦拭组件相连通,所述供液管上 依次设
置有擦拭泵、流量控制阀,所述擦拭头与所述流量控制阀相连接,所述 擦拭泵、流量控制阀、减速电机分别与所述plc控制器电性连接。
11.可选的,所述擦拭液罐、擦拭泵设置在流体装配柜内,所述流体装配柜通 过抽拉轨道滑动连接在所述机器人机身上。
12.可选的,所述擦拭液罐的底部设置有称重传感器,所述称重传感器与所述 plc控制器电性连接。
13.可选的,所述视觉检测装置为单目视觉相机或双目视觉相机。
14.可选的,所述行走装置上设置有激光雷达,所述控制柜上还设置有触摸屏, 所述激光雷达、触摸屏分别与所述pc机电性连接。
15.本发明还提供了一种擦拭清洁机器人的控制方法,应用于上述的擦拭清洁 机器人,包括以下步骤:
16.通过双目相机采集待清洁区域图像,pc机利用神经网络算法对待清洁区 域图像进行目标识别和语义分割,获取待清洁物体相对于机器人所在的中心坐 标位置;
17.机器人基于slam技术,进行自主定位导航,移动到待清洁物体所在位置;
18.控制擦拭清洁装置配合机械臂对待清洁物体进行擦拭清洁。
19.可选的,所述控制擦拭清洁装置配合机械臂对待清洁物体进行擦拭清洁, 具体包括:
20.通过机械臂上设置的视觉检测装置获取待清洁物体的三维信息,以获得物 体与机器人本身的相对位置信息;
21.对机械臂进行轨迹规划;
22.根据轨迹规划,机械臂带动擦拭组件,同时减速电机驱动擦拭头,对待清 洁物体进行擦拭清洁;
23.重复以上过程直到清洁完毕。
24.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供 的擦拭清洁机器人及其控制方法,具有“手
‑
眼
‑
腿
‑
脑”综合功能,分别是:第 一,“手”—在机器人机身上设置机械臂,用于搭载擦拭组件,由减速电机驱 动擦拭头,实现对重点区域进行擦拭清洁;第二,“眼”—设置双目相机识别 待清洁物体,能够获取待清洁物体的坐标信息,驱动机器人前往清洁,真正做 到精准化清洁,提高清洁的效率;第三,“腿”—设置agv小车作为行走装 置,能够实现自主移动、导航、路径规划,实现清洁机器人的自主定位和建图 功能;第四,“脑”—pc机能够综合控制各个装置,与各个装置信息交互, 实现智能化控制和各类信息的综合处理;此外,擦拭清洁装置通过机器臂和减 速电机的配合,能够带动擦拭头实现多角度的擦拭,擦拭头通过可拆卸方式连 接在减速电机上,方便更换,对各种形态的待清洁物体可以采用不同形状、不 同大小的擦拭头,实现针对性擦拭清洁,提高清洁效率。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性 的前提下,还可以根据这些附图获得其他的附图。
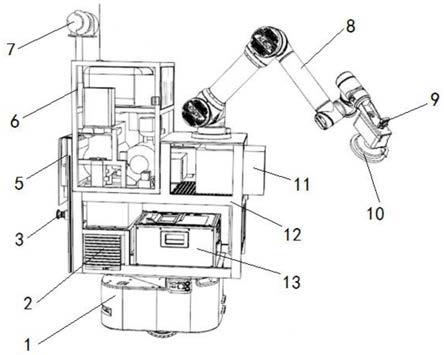
26.图1为本发明实施例擦拭清洁机器人的整装结构示意图;
27.图2为本发明实施例擦拭清洁机器人的爆炸结构示意图;
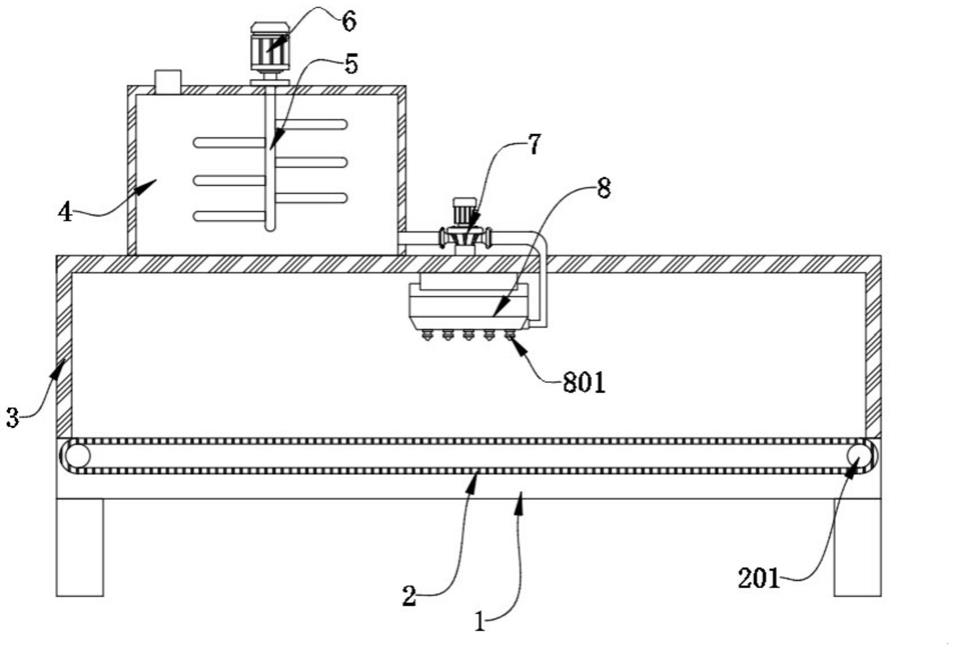
28.图3为本发明实施例擦拭清洁装置的结构示意图;
29.图4为本发明实施例擦拭清洁机器人的控制原理框图;
30.图5为本发明实施例擦拭清洁机器人的控制方法流程图;
31.附图标记:1、agv小车;2、散热风扇;3、急停按钮;4、双目相机;5、 触摸屏;6、流体装配柜;7、监控摄像机;8、机械臂;9、视觉检测装置;10、 擦拭组件;11、pc机;12、控制柜;13、机械臂控制器;14、usb扩展口; 15、plc控制器;16、示教器;17、端子排;18、逆变器;19、电池板;
[0032]3‑
1、擦拭头;3
‑
2、减速电机;3
‑
3、流量控制阀;3
‑
4、擦拭泵;3
‑
5、擦 拭液罐;3
‑
6、称重传感器。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
本发明的目的是提供一种擦拭清洁机器人及其控制方法,由机械臂搭载擦 拭组件灵活调节喷洒位置,提高了擦拭清洁精确度,并且气液混合提高了擦拭 清洁效果,能够自主导航定位,具有智能化程度高、移动灵活性高、工作范围 广的特点。
[0035]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和 具体实施方式对本发明作进一步详细的说明。
[0036]
如图1
‑
图4所示,本发明实施例提供的擦拭清洁机器人,包括:机器人机 身以及设置在机器人机身底部的行走装置,所述机器人机身上设置有控制柜 12、双目相机4、机械臂8以及擦拭清洁装置,所述擦拭清洁装置包括擦拭液 罐3
‑
5以及与擦拭液罐3
‑
5相连通的擦拭组件10,擦拭液罐3
‑
5内存有消毒清 洁液,所述擦拭组件10设置在所述机械臂8上,所述擦拭组件10包括减速电 机3
‑
2和擦拭头3
‑
1,所述减速电机3
‑
2与所述擦拭头3
‑
1驱动连接,所述减速 电机3
‑
2带动所述擦拭头3
‑
1旋转;所述机械臂8上还设置有视觉检测装置9;
[0037]
所述控制柜12内设置有供电模块、pc机11、plc控制器15、机械臂控制 器13,所述供电模块为机器人提供电能,所述pc11机分别与所述行走装置、 双目相机4、视觉检测装置9、plc控制器15、机械臂控制器13连接;所述 plc控制器15与所述擦拭清洁装置电性连接,所述机械臂控制器13与所述机 械臂8连接。
[0038]
所述行走装置为agv小车1,所述agv小车1包含agv控制模块,所述 agv控制模块与所述pc机11电性连接。
[0039]
所述机器人还包括监控摄像机7和无线通信模块,所述监控摄像机7设置 在所述机器人机身上,所述无线通信模块设置在控制柜12内,所述监控摄像 机7和无线通信模块分别与所述pc机11连接,所述pc机11通过所述无线 通信模块与后台监控服务器通信连接。
[0040]
如图3所示,所述擦拭液罐3
‑
5通过供液管与所述擦拭组件相连通,所述 供液管上依次设置有擦拭泵3
‑
4、流量控制阀3
‑
3,所述擦拭头3
‑
1与所述流量 控制阀3
‑
3相连接,所
述擦拭泵3
‑
4、流量控制阀3
‑
3、减速电机3
‑
2分别与所 述plc控制器15电性连接。
[0041]
所述擦拭液罐3
‑
5、擦拭泵3
‑
4设置在流体装配柜6内,所述流体装配柜 5通过抽拉轨道滑动连接在所述机器人机身上。
[0042]
所述擦拭液罐3
‑
5的底部设置有称重传感器3
‑
6,所述称重传感器3
‑
6与 所述plc控制器15电性连接。
[0043]
所述视觉检测装置9为单目视觉相机或双目视觉相机。
[0044]
所述行走装置上设置有激光雷达,所述控制柜上还设置有触摸屏4,所述 激光雷达、触摸屏4分别与所述pc机11电性连接。
[0045]
其中,pc机11还连接有交换机、dc/dc模块、急停按钮3;无线通信模 块由4g无线路由器等组成。供电模块包括电池板19、接触器、端子排17、 逆变器18、继电器板、充电孔等结构,所述端子排17上连接断路器、熔断器 等,所述机械臂控制器13还可以连接示教器16。所述控制柜12上还设置有 散热风扇2,用于为控制柜12散热。
[0046]
如图5所示,本发明还提供了一种擦拭清洁机器人的控制方法,应用于上 述的擦拭清洁机器人,包括以下步骤:
[0047]
通过双目相机采集待清洁区域图像,pc机利用神经网络算法对待清洁区 域图像进行目标识别和语义分割,获取待清洁物体相对于机器人所在的中心坐 标位置;
[0048]
机器人基于slam技术,进行自主定位导航,移动到待清洁物体所在位置;
[0049]
控制擦拭清洁装置配合机械臂对待清洁物体进行擦拭清洁。
[0050]
其中,所述控制擦拭清洁装置配合机械臂对待清洁物体进行擦拭清洁,具 体包括:
[0051]
通过机械臂上设置的视觉检测装置获取待清洁物体的三维信息,以获得物 体与机器人本身的相对位置信息;
[0052]
对机械臂进行轨迹规划;
[0053]
根据轨迹规划,机械臂带动擦拭组件,同时减速电机驱动擦拭头,对待清 洁物体进行擦拭清洁;
[0054]
重复以上过程直到清洁完毕。
[0055]
本发明提供的擦拭清洁机器人的工作原理:
[0056]
第一,支持擦拭清洁模式,可以人工遥控切换作业,也可将清洁机器人放 置于工作环境中,通过按键切换到智能模式自行作业;
[0057]
第二,为了更科学规范的针对不同物体不同等级所需采取的不同清洁模 式,也为了对物体更全面的360度清洁,不留死角,本发明提供的机器人通过 单目相机和双目相机等传感器获取环境信息,并通过训练好的深度神经网络对 清洁物体进行目标检测和环境语义分割,识别并获取待清洁物体相对于机器人 所在的中心坐标位置;
[0058]
第三,在获取清洁目标物体相对位置后,通过融合视觉、激光等多种传感 器信息的slam技术,实现清洁机器人的自主定位和建图功能,并计算出清洁 目标物体所在地图中坐标位置,通过实时避障路径规划,机器人向清洁目标物 体方向移动,在自主移动地过程中需要保持对周围环境的感知并进行实时地图 构建更新,并获取自身定位,重复以上过程直到接近待清洁物体;
[0059]
第四,在自主接近代清洁附近后,通过机械臂上的双目视觉系统扫描清洁 目标,
获取清洁物体的精确三维模型信息,尤其是擦拭清洁目标的在线特征信 息,并计算出精确位置关系,融合机械臂柔性控制参数工艺,自主生成机器人 喷雾清洁轨迹,实现机器人轨迹的自适应在线规划,从而保证擦拭清洁轨迹的 精准性。
[0060]
本发明提供的擦拭清洁机器人及其控制方法,具有“手
‑
眼
‑
腿
‑
脑”综合功 能,分别是:第一,“手”—在机器人机身上设置机械臂,用于搭载擦拭组件, 由减速电机驱动擦拭头,实现对重点区域进行擦拭清洁;第二,“眼”—设置 双目相机识别待清洁物体,能够获取待清洁物体的坐标信息,驱动机器人前往 清洁,真正做到精准化清洁,提高清洁的效率;第三,“腿”—设置agv小 车作为行走装置,能够实现自主移动、导航、路径规划,实现清洁机器人的自 主定位和建图功能;第四,“脑”—pc机能够综合控制各个装置,与各个装 置信息交互,实现智能化控制和各类信息的综合处理;此外,擦拭清洁装置通 过机器臂和减速电机的配合,能够带动擦拭头实现多角度的擦拭,擦拭头通过 可拆卸方式连接在减速电机上,方便更换,对各种形态的待清洁物体可以采用 不同形状、不同大小的擦拭头,实现针对性擦拭清洁,提高清洁效率。
[0061]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施 例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的 一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变 之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。