1.本发明涉及食品处理设备领域,更具体地涉及智能食品处理设备领域。
背景技术:
2.食品处理设备,例如混合器(blender),在大多数家庭中是常见的。为了使用该设备以期望并且一致的方式制备食品,使用者通常遵循配方。
3.传统上将配方整理成配方簿;然而,现在通常在需要时通过因特网访问给定的配方。当需要访问配方时,访问配方的缺点是可能难以重新定位配方以用于随后的使用。这可能导致部分记忆的配方被用户遵循,这可能导致次优且令人失望的食品制备。
4.此外,一些配方可能需要以特定顺序来遵循某些步骤以实现期望的结果,这可能是无经验的用户不知道或不理解的。
5.因此,需要一种更加用户友好的食品处理设备。
技术实现要素:
6.本发明由权利要求限定。
7.根据依据本发明的一个方面的示例,提供了一种食品处理设备,包括:
8.容器,用于接纳待处理的配料;
9.混合叶片,位于该容器中;
10.传感器,用于感测被接纳在容器处的配料的特性;
11.处理器和/或通信系统,处理器用于分析特性,通信系统用于将特性发送到远程数据处理资源以进行分析或进一步分析,其中该分析用于标识多个所添加的配料的配料类型并且用于标识与所添加的配料类型一致的配方;以及
12.输出设备,用于引导用户遵循所标识的配方的剩余部分。
13.该设备提供了对添加到食品处理设备的容器中的配料的自动标识。
14.然后可以使用最近添加的配料的自动标识来引导用户遵循给定的配方。
15.在一个实施例中,传感器包括重量传感器,并且其中配料的特性包括由重量传感器产生的响应曲线。
16.当将配料添加到容器中时(例如当配料冲击容器的基座时),所产生的响应曲线可以提供与被添加到容器中的配料的类型有关的信息。
17.在一个实施例中,传感器包括相机,并且其中配料的特性包括由相机产生的可视配料指示器。
18.相机可以用于帮助标识配料,例如通过被包括在分析中的图像标识能力,该图像标识能力由处理器执行。
19.在另一实施例中,该设备还包括适于可拆卸地连接到容器的基座单元,并且相机位于基座单元内,其中该设备包括适于将光从容器的上部引导到相机的光导。
20.这样,最近添加的配料对于相机是可见的。例如,光导可以被构建在容器的手柄
中。
21.在另一实施例中,容器包括手柄,其中光导的至少一部分位于手柄内。
22.这样,光导可以至少部分地被容纳在具有附加功能的结构内。
23.在一个实施例中,该传感器包括以下各项中的一项或多项:
24.麦克风,其中该配料的特性包括被接纳在该容器中的该配料的音频信号;
25.扭矩传感器,被耦合到混合叶片,其中配料的特性包括混合阻力;
26.电测量传感器,其中该配料的特性包括配料阻抗;
27.温度传感器,其中配料的特性包括配料的温度;以及
28.气体传感器,其中配料的特性包括所述容器内的空气的气体组成。
29.这样,在标识配料时可以考虑附加的配料特性。
30.在一个实施例中,通信系统适于与用户的智能设备通信。
31.这样,用户可以以方便的方式与食品处理设备交互,而不需要在食品处理设备本身中构建附加的用户交互能力。
32.在一个实施例中,处理器适于将机器学习算法应用于配料的特性,以分析配料的特性。
33.这样,食品处理设备标识配料和相关配方的能力可以随着使用而发展和提高。
34.根据依据本发明的一个方面的示例,提供了一种根据基于所标识的配料而标识的配方来引导用户的系统,该系统包括
35.一个或多个如上所述的食品处理设备;
36.远程数据处理资源,通过该通信系统被耦合到该食品处理设备上,该远程数据处理资源包括协作机器学习算法,并且其中该系统适于:
37.基于协同机器学习算法更新一个或多个食品处理设备的机器学习算法;以及
38.将所分析的配料的特性从一个或多个食品处理设备上载到远程数据处理资源,以用于协作机器学习算法。
39.这样,可以使用中央服务器(任意数量的设备可以与其通信)来训练和更新机器学习算法,从而增加用于训练机器学习算法的数据集。
40.根据依据本发明的一个方面的示例,提供了一种配方引导方法,该配方引导方法,包括:
41.当配料被容纳在容器中时感测配料的特性;
42.分析该配料的特性和/或将该配料的特性通信到远程数据处理单元以进行分析或进一步分析该配料的特性;以及
43.基于对配料的特性的分析来标识在容器处接纳的配料的配料类型;
44.基于所标识的配料类型来标识配方;以及
45.引导用户遵循所标识的配方的剩余部分。
46.在一个实施例中,标识配料类型包括对配料特性应用机器学习算法。
47.在另一实施例中,该方法还包括:
48.从远程数据处理资源获得协同机器学习算法;
49.基于协作机器学习算法来更新机器学习算法。
50.在另一实施例中,该方法还包括:
51.获得指示所标识的配方是否已经被遵循的用户输入;以及
52.如果用户输入指示已经遵循所标识的配方,则基于所分析的配料特性来更新协作机器学习算法。
53.这样,只有对应于正确遵循的配方的数据被用于形成协作机器学习算法的一部分,从而增加了算法的准确性。例如,用户可以遵循某个配方,并且在每个步骤之后,可以按下食品处理设备的用户接口上的“下一个(next)”按钮。通过按下这个“下一个”按钮,用户输入可以隐含地确认前一配方步骤的配料已经被添加,这然后可以被用于注释传感器数据。
54.在一个实施例中,该方法还包括基于所标识的配方来建议附加配料。
55.根据依据本发明一个方面的示例,提供了一种包括计算机程序代码装置的计算机程序,当计算机程序在计算机上运行时,计算机程序代码装置适于实现上述方法。
56.参考下面描述的实施例(多个),本发明的这些和其它方面将变得显而易见。
附图说明
57.为了更好地理解本发明,并且为了更清楚地示出如何实现本发明,现在将仅通过示例的方式参考附图,其中:
58.图1示出了食品处理设备的示意图;
59.图2示出了在容器中接纳到配料时由重量传感器产生的响应曲线的示例图;
60.图3a和3b示出了图1的食品处理设备的实施例的示意图;
61.图4示出了根据基于所标识的配料而标识的配方来引导用户的系统的示意性表示;以及
62.图5示出了配方引导方法。
具体实施方式
63.将参考附图描述本发明。
64.应当理解,详细描述和特定示例虽然指示了装置、系统和方法的示例性实施例,但是仅用于说明的目的,而不旨在限制本发明的范围。本发明的装置、系统和方法的这些和其它特性、方面和优点将从以下描述、所附权利要求和附图中变得更好理解。应当理解,附图仅仅是示意性的并且没有按比例绘制。还应当理解,在所有附图中使用相同的附图标记来表示相同或相似的部件。
65.本发明提供一种适于标识配料和相关配方的食品处理设备。该设备包括用于接纳待处理配料的容器以及位于该容器中的混合叶片。该设备还包括传感器,用于感测在容器处接纳的配料的特性;以及用于分析该特性的处理器和/或用于将该特性通信到远程数据处理资源以进行分析或进一步分析的通信系统,其中该分析用于标识多个添加配料的配料类型以及用于标识与添加配料类型一致的配方。该设备还包括输出设备,用于引导用户遵循所标识的配方的剩余部分。
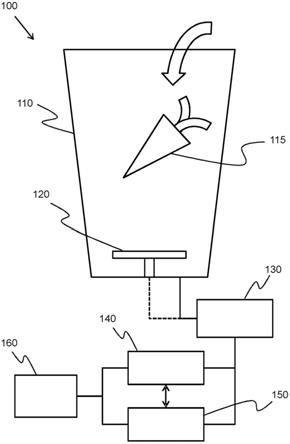
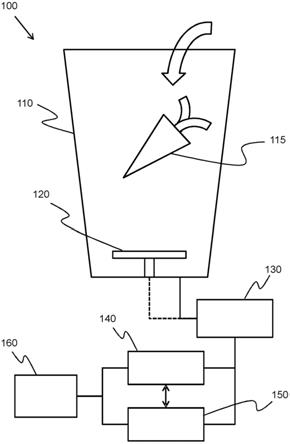
66.图1示出了根据本发明一个方面的食品处理设备100的示意图。
67.食品处理设备100包括用于接纳待处理配料115的容器110以及位于容器内的混合叶片120。
68.食品处理设备100还包括与容器110通信的传感器130。传感器适于感测在容器处接纳的配料115的特性。
69.例如,传感器可以包括重量传感器,并且配料的特性可以包括由重量传感器产生的响应曲线。重量传感器或秤可以被视为弹簧,并且弹簧的压缩或膨胀与被放置在秤上的负载相对应。每次将配料投掷或倾倒到食品处理设备的容器110中时,秤将不会立即稳定到所添加的配料的精确重量,而是遵循短促的上下响应曲线直到达到平衡。重量传感器还可以适于测量位于容器中的配料的压力和/或压力变化。下面参考图2对此进行描述。
70.每种类型的配料(例如流体、水果、冰等)不同地影响食品处理设备的规模,并且因此产生不同的响应曲线。因此,响应曲线的形式可以被用于导出关于已经被接纳在容器中的配料的类型的信息,该信息可以被用于标识配料的类型。
71.此外,不同类型的配料将具有不同的响应曲线,即使它们具有相同的重量。例如,特定配料的响应曲线的形状可以取决于:配料的重量;配料的弹性(例如,坚果可以在空气中反弹并在静止前再次掉落);配料的形状;配料的流动性/粘度(例如,可以从特定的响应曲线检测液体配料,然而具有高度不同的粘度水平的液体也将提供不同的响应,例如水相对油相对奶油物质(如酸奶或奶油));扔进或倒入的方式;以及已经存在于混合器中的配料。
72.相同配料的响应曲线将根据预先加入的配料而不同。例如,假设在食品处理设备中已经有200ml的牛奶/水,水果或坚果的添加将产生与没有液体预先添加到设备中的情况完全不同的响应曲线。
73.作为示例,如果用户遵循未知配方,则针对用户的输出可以采取以下形式:
74.197g的液体
75.123g的硬果
76.166g的软果
77.56g的冰块。
78.然而,如果该配方是由该设备识别的,是用户已知的或由用户手动标识的,则以上输出可以被细化如下:
79.197g的克牛奶
80.123g的榛子
81.86g的香蕉
82.80g的苹果
83.56g的冰块。
84.食品处理设备100还包括处理器140和/或通信系统150,处理器用于分析特性,通信系统用于将特性通信到远程数据处理资源以进行对配料的特性的分析或进一步分析。
85.该分析基于由传感器130测量的配料的特性来标识所添加的配料的多个配料类型。此外,处理器或远程处理资源标识与添加配料类型一致的配方。处理器可以适于通过机器学习算法来标识配料和相关联的配方,该机器学习算法被训练成基于所感测的配料特性来标识配料。下面参考图4描述这种算法的实施方式。
86.食品处理设备100还包括输出设备160,用于引导用户遵循所标识配方的其余部分。输出设备例如可以包括用于与用户通信的显示器和/或扬声器。
87.例如,食品处理设备可以检测到使用者已经将100g草莓和100g香蕉加入到容器中。这可以被处理器标识为冰沙的初始配料。因此,输出设备可以向用户指示配方已经被标识为冰沙。此时,用户可以向食品处理设备提供反馈:所标识的配方确实是正确的。然后,输出设备可以生成用户应该如何处理的指令,以便完成配方,例如通过生成视觉或听觉指令,以指示用户将例如200ml的牛奶添加到容器中。
88.食品处理设备可以适于接纳一种或多种待处理配料的任何设备。例如,食品处理设备可以是如图1所示的混合器。在另一例子中,食品处理设备可以是制汤机,在这种情况下,图1所示的设备还可以包括加热元件,用于在配料被处理之后加热配料。
89.应当注意,上述秤可以适于仅区分被接纳在容器中的配料的类型,而不是确切的配料本身。然后可以根据配料的类型和配方的上下文来确定确切的配料。
90.配料的类型可以被确定为以下之一:水样配料;油样配料;奶油状配料;鸡蛋;硬果;软果;蔬菜;冰块;脉冲;坚果;肉;和粉末。应当注意,该列表不是穷尽的,并且食品处理设备可以利用任何其它配料类型来对配料进行分类。
91.通过增加多个重量传感器,例如在容器基座中心处的一个重量传感器和在侧面的四个重量传感器,可以使重量传感器更加精确和稳健,这意味着当标识配料时,设备可以考虑四个附加的响应曲线。
92.备选地或附加地,传感器可以包括相机,并且配料的特性可以包括由相机产生的可视配料指示器。
93.为了标识在容器110处接纳的配料,相机可以被放置成使得它可以看到在容器的顶部处引入的东西并且具有从顶部向下的视图,使得容器的最近添加是在相机的视图中。这样,相机可以观察被添加到混合器中的每个配料。下面参考图3讨论食品处理单元内的相机的各种实施方式。
94.相机传感器和重量传感器可以单独使用,或者组合使用,以提高配料标识的准确性。例如,该相机传感器可以更好地检测哪种类型的配料被接纳在该传感器中;然而,基于重量传感器响应曲线的标识可能更适合于估计总重量以及标识单个块的重量(每单个块的克数、块尺寸和块数量)两者的量。
95.块大小信息可以被用于向用户给出反馈(例如,“下一次,请将香蕉切成更小的块”)或自动调节用于混合叶片的马达设置或选择适当的混合工具(例如,刀、叉或勺)。
96.此外,重量传感器和相机传感器的组合可以克服配料在视觉上看起来非常相似(例如牛奶和奶油)但将导致重量传感器的不同响应曲线的情况。
97.除了重量传感器和相机传感器之外,传感器130可以包括附加传感器,该附加传感器可以与重量传感器和/或相机传感器结合使用。
98.例如,传感器130还可以包括麦克风,在这种情况下,配料的特性还包括被接纳在容器中的配料的音频信号。
99.在这种情况下,进入容器的配料的声音可以被用作配料标识过程的一部分。例如,冰块将对软果产生不同的音频信号,软果将对液体产生不同的音频信号。因此,音频信号可以被用于帮助将配料彼此区分。
100.相同的麦克风可以被用于检测混合声音以自动适应食品处理器设置。麦克风可以被嵌入食品处理器的功率底部,例如基座单元。备选地,麦克风不被包括在食品处理器中,
而是位于存在于同一房间(例如厨房)中的智能扬声器中,并且通过食品处理设备内的通信系统被通信地链接到食品处理器。
101.此外,传感器130可包括联接到食品处理设备的混合叶片120的扭矩传感器,在这种情况下,配料的特性包括混合阻力。
102.换言之,可以从驱动食品处理设备的混合叶片120的马达的电阻曲线中提取与配料特性有关的附加数据点。不同的配料和不同的配料组合为混合叶片提供不同的阻力,因此可以被用于区分配料。
103.此外,传感器130可以包括电测量传感器,在这种情况下,配料的特性包括配料阻抗。
104.更具体地,可以将电测量传感器添加到混合叶片120的金属叶片。与混合叶片接触的配料的生物阻抗谱可以被用于确定配料的盐含量和脂质含量,其可以被用于使配料细化(例如,对于相机,奶油和牛奶两者看起来很相似但具有非常不同的脂质含量)。
105.此外,传感器130还可以包括适于确定配料温度的温度传感器,和/或适于分析容器内的空气以便标识配料的气体传感器。
106.图2示出了由重量传感器在容器中接纳配料时产生的响应曲线200的示例曲线,其中x轴线表示时间,y轴线表示检测到的重量。
107.从响应曲线可以看出,当在容器处接纳配料时,重量开始急剧增加。重量测量然后振荡直到读数稳定在误差条210之间,此时,通常数字秤将给出读数。然而,处理器140或远程数据处理资源可以分析整个响应曲线以便标识所接纳的配料。
108.图3a和3b示出了包括相机传感器300和光导310的食品处理设备100’的实施例的示意性表示。
109.能够捕获这种视图的相机的最简单的实施方式是将相机容纳在容器的盖件中,使得相机具有容器内的配料的俯视图。
110.在具有大形状因素的混合器中,将放置在盖件顶部的相机添加到电源和计算处理单元是相对简单的。当顶盖打开时,放置在该顶盖上的相机可以视觉地捕获添加到容器的东西。当盖件关闭时,相机可以由与容器顶部紧密配合的盖件来保护。
111.然而,设计用于家庭使用的大多数混合器将具有不同的,更具体地,更小的,形状因素。在具有这种更小形状因素的混合器中(尽管不是不可能的),由于相机需要连接到电源和处理单元,因此不能直接将相机定位在容器的盖件上。将这些部件放置在容器或盖件中具有额外的复杂性,即这些部件需要是防洗碗机的,因此需要对高温和潮湿环境具有耐受性。
112.该问题可以通过将相机定位在基座单元中来解决,该基座单元可拆卸地连接到容器,这意味着可以在没有相机的情况下移除容器以进行清洁。
113.然而,将相机简单地定位在容器下方的基座单元中将导致相机仅能够捕获首先被添加到容器中的配料,此后其视野将被阻挡。
114.图3a示出了该问题的解决方案,其中相机300与被容纳在容器壁内的光导310通信。
115.该光导系统或潜望镜系统可以将来自容器顶部的光传输到容器底部以进入相机。这样,相机仍然可以记录哪些配料被添加到容器中而不会被阻挡。
116.图3b示出了光导位于容器的手柄315内的示例。可以将手柄制成不透明的,使得外部光不能进入相机。
117.应当注意,上述任何传感器可以位于食品处理设备的基座单元中,并且通过任何合适的装置连接到容器。例如,重量传感器可以位于基座传感器中并且适于测量容器和配料的重量,容器的重量可以从该重量中减去。在另一实例中,电测量传感器可以位于基座单元中并且经由基座单元中的导电机械耦合单元被电耦合到混合叶片。
118.图4示出了根据基于所标识的配料而标识的配方来引导用户的系统400的示意性表示。
119.该系统包括一个或多个如上所述的食品处理设备100以及通过通信系统150连接到食品处理设备的远程数据处理资源410。
120.远程数据处理资源包括协作机器学习算法。协作机器学习算法是组合不同混合器的训练数据的机器学习算法,每个混合器可以具有机载机器学习算法,并且该机器学习算法将它们组合成一个训练算法。
121.以此方式,该系统可以适于基于该协同机器学习算法来更新该一个或多个食品处理设备的机器学习算法,并且将所分析的配料的特性从该一个或多个食品处理设备上载到该远程数据处理资源,以用于训练协同机器学习算法。
122.一个或多个食品处理设备100可以通过连接到每个食品处理设备的通信系统150的用户智能装置来与远程数据处理资源410通信。
123.每当用户遵循配方时,可以向协作机器学习算法提供多个标记过的训练数据点。例如,如果配方指示用户必须添加50克草莓,则秤的后续响应曲线提供标记过的数据点。这些标记过的数据点可以被测量并且上载到远程数据处理资源。来自一个或多个食品处理设备的所有标记数据点可以被组合以提供大的标记数据集,该数据集可以被用于训练协同机器学习算法,该协同机器学习算法可以从响应曲线和与配料的特性相关联的任何其他传感器信号中检测配料。
124.为了训练算法来学习不同配料的响应曲线,可以遵循以下方法。
125.每当用户遵循配方时,生成标记的响应曲线的集合(针对添加的每个单独配料有一个响应曲线)。该阶段还可以包括与配料的特性相关联的任何其他传感器信号。该标记过的响应曲线列表被发送到后端服务器或远程数据处理资源。这样,生成了大量的标记训练数据。在后端服务器上,训练协作机器学习算法被训练为从标记过的响应曲线中标识配料的类型。为此可以使用神经网络。然后将该经过训练的算法重新分配给食品处理设备。
126.协作机器学习算法依赖于用户遵循配方的顺序来获得准确的数据集。在开始混合过程之前,可以提示用户确认他们是否已经遵循配方顺序。如果他们没有确认已经遵循配方顺序,则可以将来自该会话的数据排除在协作学习过程之外。
127.应当注意,在传感器包括相机的情况下,只要在不同的混合器和混合器模型中,失真损失不大并且只要失真相同或相似,使得可以在协作算法的训练中考虑该失真,上述协作机器学习算法的训练就可以处理强烈失真的图像。在一些情况下,只有目标颜色信息足以区分在配方中使用的各种配料。
128.图5示出了配方引导方法500。
129.该方法开始于步骤510,当配料被接纳在容器中时,感测配料的特性。可以使用任
何合适的感测装置(例如上述的那些)来感测配料的特性。
130.在步骤520中,配料的特性被分析和/或通信到远程数据处理单元进行分析或进一步分析。
131.在步骤530中,基于对配料特性的分析来标识在容器处接纳的配料的配料类型。
132.可以使用上述算法来执行分析和标识配料类型的步骤。
133.在步骤540中,基于所标识的配料类型来标识配方。配方可以以与配料类型的标识类似的方式来标识。换言之,可以通过将可以被协作训练的机器学习算法应用于所标识的配料来标识配方。
134.可以自动标识该配方,或者可以基于所标识的配料向用户提供建议的配方,用户然后可以确认该建议的配方是正确的。此外,可以向用户呈现建议配方的列表,然后用户可以从列表中选择期望的配方。
135.该系统可以知道多个配方;然而,用户可以将新的配方添加到已知的配方中。
136.在步骤550中,引导用户遵循所标识的配方的剩余部分。可以基于已经存在于容器内的配料来调整引导。
137.此外,配方引导可以包括基于所标识的配方来建议附加配料。例如,给定的配方可以包括许多已知的变化,其中一些变化包括备选的配料。这样,用户的口味可以基于通常使用的配方来被评估,并且被用于选择与用户口味一致的变化。这也可以被用于避开用户过敏的配料。例如,用户可以在配方引导设置中选择偏好无坚果,其然后可以被用于提供不包含所指示配料(例如坚果)的配方变化。
138.总之,本发明提供了一种设备、系统和方法,用于标识在食品处理设备的容器处接纳的配料,并且基于所标识的配料向用户提供配方引导。
139.应当注意,用户可能并不总是根据所提供的引导逐步遵循该配方。通过自动检测在容器处接纳时的配料类型,有可能处理用户遵循的不同配方顺序。此外,用户可以具有他们定期制作的一组喜爱的配方。配方的自动检测可以被用于帮助跟踪用户的营养摄入,并且提供对新配方的建议或对改变其常规配方以提高其营养价值的建议。
140.通过研究附图、公开内容和所附权利要求,本领域技术人员在实践所要求保护的本发明时可以理解和实现所公开实施例的变型。在权利要求中,词语“包括(comprising)”不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。单个处理器或其它单元可以实现权利要求中所述的若干项的功能。在相互不同的从属权利要求中叙述某些措施的事实并不表示不能有利地使用这些措施的组合。如果上面讨论了计算机程序,则它可以存储/分布在适当的介质上,例如与其他硬件一起提供或作为其他硬件的一部分提供的光存储介质或固态介质,但是也可以以其他形式分布,例如经由因特网或其他有线或无线电信系统。如果在权利要求或说明书中使用术语“适于”,则应注意,术语“适于”旨在等同于术语“被配置为”。权利要求中的任何附图标记不应解释为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。