1.本发明属于光场调控技术领域,具体涉及一种光场实时探测调控方法与装置。
背景技术:
2.光场调控是通过空间光调制器改变光场的振幅、相位和偏振态等参数实现光场波阵面的整形,进而达到消除相差、散射、环境扰动等因素对光学成像或检测的影响。光场调控的应用非常广泛,例如,在生物成像和检测领域,通过对射入生物组织的光进行光场调控,使光场在生物组织内部或外部任意一点进行聚焦,提高成像和检测的精度;在天文观测领域,通过光场调控补偿大气扰动对光场造成的波前扭曲,使天文台观测到的星系更加清晰。
3.目前的光场调控系统,在相机拍摄光场后需要将数据传回计算机进行运算,然后再通过计算机产生对空间光调制器的控制信号来对光场进行调控。由于光场的数据信息量非常大,而且整个系统通信链路过长,相机拍摄的光场图像数据上传至计算机处理,计算机再将处理后的控制信号数据传送给空间光调制器,大量原始图像数据的传输需要消耗大量时间,导致系统响应速度很慢。然而,散射及扰动等因素对光学系统的成像和检测的影响是实时动态变化的,如果光场调控系统的调控速度无法跟上散射及扰动的变化速度,将导致光场调控失效。例如,在生物样品检测中,生物组织分子的无规则运动对光场的扰动速度在亚毫秒量级,因此要实现生物样品的准确检测,光场调控系统的响应速度也须达到亚毫秒量级甚至更高,但当前光场调控系统的调控速度极限仅能达到十毫秒量级,这远远不能满足需求。再例如,在天文观测中,大气层的高速扰动将导致天文望远镜所接收到的外来光场的波前发生扰动,使观测到的星球图像变得非常模糊,如果光场调控系统的响应速度低于大气层的扰动速度,那么将无法获得准确的星球图像信息,从而对天文学研究造成极大困扰。
4.因此,如果能够将图像传感器和空间光调制器高度集成,并利用fpga等可编程器件对数据进行实时处理,则可以避免大批量数据传输耗时长的问题,大幅提高光场调控的速度。此外,利用fpga等可编程器件强大的并行处理能力,可在处理数据的同时高速传输数据,这可将光场调控系统的动态响应能力进一步提升,最终提高光学成像和检测的精度。
技术实现要素:
5.为解决上述问题,本发明提出了一种光场实时探测调控方法与装置,利用可编程模块对图像传感器采集的图像信息进行高速实时处理,产生空间光调制器生成所需调制光场对应的调制图案信息,并控制空间光调制器显示调制图案信息后对光场进行调控。本发明光场实时探测调控方法与装置的调控速度可达到亚毫秒量级,解决了现有光学调控系统的调控速度无法满足高速扰动下光场探测和调控的问题,在动态光学成像等领域具有潜在的应用前景。
6.一方面,本发明提供了一种光场实时探测调控方法,其特征在于:首先由可编程模
块控制图像传感器探测被扰动后的光场形成的图像信息;然后由所述可编程模块对所采集的图像信息进行高速处理,产生空间光调制器生成所需调制光场对应的调制图案信息;最后由可编程模块控制所述空间光调制器显示所述调制图案信息后对光场进行调控。
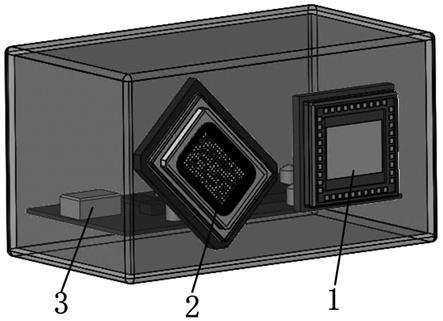
7.另一方面,本发明提供了一种光场实时探测调控装置,其特征在于:包括图像传感器、空间光调制器、可编程模块;所述图像传感器用于采集被扰动后的光场形成的图像信息;所述可编程模块用于控制所述图像传感器采集被扰动后的光场形成的图像信息并对所采集的图像信息进行高速处理,产生空间光调制器生成所需调制光场对应的调制图案信息;所述空间光调制器用于显示所述调制图案信息后对光场进行调控;所述可编程模块同时用于控制所述空间光调制器显示所述调制图案信息后对光场进行调控。
8.本发明还提供了一种光场实时探测调控装置,其特征在于:包括图像传感器、图像传感器可编程模块、空间光调制器、空间光调制器可编程模块、高速通信模块;所述图像传感器用于采集被扰动后的光场形成的图像信息;所述图像传感器可编程模块用于控制所述图像传感器采集被扰动后的光场形成的图像信息并对所采集的图像信息进行高速处理,产生空间光调制器生成所需调制光场对应的调制图案信息;高速通信模块用于将图像传感器可编程模块中产生的所述调制图案信息传输至所述空间光调制器可编程模块;所述空间光调制器用于显示所述调制图案信息后对光场进行调控;所述空间光调制器可编程模块用于控制所述空间光调制器显示所述调制图案信息后对光场进行调控。
9.本发明对比已有技术具有以下创新点和显著优点:1. 本发明利用可编程器件的高速处理能力,对图像传感器采集的图像数据进行处理以后再传输给空间光调制器进行显示和调控,无需将原始图像数据传输至计算机处理,避免了大量原始图像数据传输消耗的时间;2. 本发明将图像传感器和空间光调制器高度集成,利用同一片可编程模块,实现图像传感器对图像数据的采集和处理,并控制空间光调制器生成目标光场,无需进行数据的传输,大幅提高调控速度;3. 本发明利用了可编程器件的并行处理能力,在人工智能图像处理等的过程中,图像数据的传输和处理可以并行执行,极大的提高了调控的速度;4. 本发明所提供的光场实时探测与调控装置具有极高的调控速度,可大幅提高成像精度,可运用于诸如生物组织在体成像检测等的动态光学成像和检测中。
附图说明
10.图1为本发明光场实时探测调控方法的示意图;图2为本发明光场实时探测调控一体化集成装置的示意图;图3为本发明光场实时探测调控分体式装置的示意图;图4为本发明光场实时探测调控一体化集成装置运用于自适应光学校正系统中的实施例示意图;图5为采用本发明光场实时探测调控方法和装置获得的自适应光学波前校正效果图,其中图5(a)为校正前图像,图5(b)为现有光场调控方法校正后得到的图像,5(c)为经过本发明光场实时调控方法与装置校正后得到的图像;图6为本发明光场实时探测调控分体式装置运用于散射介质聚焦的实施例示意图;
图7为采用本发明光场实时探测调控方法和装置获得的散射介质聚焦效果图,其中图7(a)为调控前图像,图7(b)为现有光场调控方法调控后得到的聚焦图像,7(c)为经过本发明光场实时调控方法与装置调控后得到的聚焦图像;其中:1-图像传感器、2-空间光调制器、3-可编程模块、4-图像传感器可编程模块、5-空间光调制器可编程模块、6-高速通信模块、7-cmos图像传感器、8-可变形反射镜、9-外星系、10-扰动气体、11-分光棱镜、12-分光棱镜、13-夏克哈特曼透镜阵列、14-透镜、15-摄像机、16-铁电空间光调制器、17-散射介质、18-激光器、19-半波片、20-分光棱镜、21-反射镜、22-透镜、23-透镜、24-半波片、25-扩束系统、26-反射镜、27-分光棱镜、28-分光棱镜、29-分光棱镜、30-透镜。
具体实施方式
11.下面结合附图和实施例对本发明作进一步说明。
12.本发明将利用可编程器件的高速处理能力对图像数据进行片上处理,可实现高速扰动下光场的实时探测和调控,可运用于动态光学成像检测系统中。以下通过各实施例对本发明的实施进行详细的阐述。
13.实施例1本实施例将本发明提出的光场实时探测调控方法与装置应用到自适应光学校正系统中,空间光调制器所调控的光场为被流动气体扰动后的光场,实现了由干扰气体造成的光束的波前扰动的高速准确的校正。
14.本实施例所构建的光场实时探测调控装置如附图4所示,其图像传感器使用的是cmos图像传感器7、空间光调制器使用的是可变形反射镜8;cmos图像传感器7用于采集被扰动气体10扰动后的波前信息;可编程模块3用于控制cmos图像传感器7采集被扰动气体10扰动后光束的波前信息,并对所采集到的波前信息进行分析处理后解算出光场的波前相位;可变形反射镜8用于校正波前畸变。如附图1-2和附图4所示,该光场实时探测调控装置的探测调控过程如下:外星系9发出的光由扰动气体10扰动后透过分光棱镜11照射在可变形反射镜8上,由可变形反射镜8对该光束进行调制后反射;被可变形反射镜8反射后的光经分光棱镜11反射后由分光棱镜12分成两路,其中反射光经夏克哈特曼透镜阵列13后成像在cmos图像传感器7上,用于探测干扰后光场的波前信息;然后,可编程模块3发出控制指令控制cmos图像传感器7采集经过夏克哈特曼透镜阵列13后的图像信息;随后可编程模块3对采集到的图像信息进行分析处理,由于夏克哈特曼透镜阵列13对波前进行分割采样,每个子孔径范围内的波前倾斜将使单元透镜的聚焦光斑产生横向漂移,因此通过测量光斑中心相对于用平行光的基准位置的漂移量,求出各子孔径范围内的波前在两个方向上的平均斜率,由此解算出光场的波前相位;可编程模块3通过求解得到的波前相位生成可变形反射镜8的控制信号,进而控制可变形反射镜8上各变形镜的姿态来补偿输入光场的畸变波前;此处特别强调,由可变形反射镜8对扰动波前的补偿是闭环调控的过程,将cmos图像传感器7测得的扰动波前信息实时地叠加在可变形反射镜8补偿的波前信息上,进而实现实时的波前补偿;经过波前补偿后的光束经分光棱镜12透射后由透镜14成像在摄像机15上,得到校正后的星系图像。
15.附图5为采用本发明光场实时探测调控方法后获得的自适应光学波前校正后成像
的效果对比图。图5(a)为波前畸变校正前图像,由于气流的高速扰动,所拍摄的图像非常模糊,难以观测到星系的深层信息。图5(b)为现有光场调控方法校正后得到的图像,由于波前畸变得到一定程度的校正,图5(b)相比于图5(a)更清晰,但由于现有系统的方法和硬件技术所限,在对图像信息的处理上耗时较长,极限速度约为10 ms左右,因此在系统处理调控波前信息的同时,扰动气体对光场波前的影响已经变化,导致图像的校正效果难以进一步提高,体现在校正后的图像对比度很低。图5(c)为采用本发明对扰动波前信息进行实时校正后得到的图像,相比于图5(b)图像的对比度显著提升。本发明将图像传感器7和可变形反射镜8高度集成,由图像传感器7测得扰动的波前信息后由可编程模块3对其进行处理并直接控制可变形反射镜8对入射的光束进行补偿调控,在此过程中,可编程模块3控制cmos图像传感器7采集图像的时间为 0.1 ms左右,可编程模块3进行图像处理并生成可变形反射镜8的调制图案的时间小于1
ꢀµ
s,可编程模块3控制可变形反射镜8调控光场的时间为0.1 ms左右。因此本实施例光场实时探测调控装置的波前畸变校正速度为0.2 ms左右,相比于现有光场调控方法提高了50倍,因此能获得对比度更高的外星系成像图像。
16.实施例2本实施例将本发明提出的光场实时探测调控方法与装置应用到数字光相位共轭散射介质聚焦系统中,空间光调制器所调控的光场为入射到散射介质前的光场,以此增强光场通过散射介质扰动后的聚焦效果。
17.本实施例所构建的光场实时探测调控装置如附图6所示,其图像传感器使用的是cmos图像传感器7、空间光调制器使用的是铁电空间光调制器16。cmos图像传感器7用于采集被散射介质17扰动后的干涉光场信息;图像传感器可编程模块4用于控制cmos图像传感器7采集图像,并对所采集到的图像信息进行分析处理后解算出扰动后光场的相位值,生成铁电空间光调制器16的调制图案;高速通信模块6用于将图像传感器可编程模块4产生的调制图案信息传输至空间光调制器可编程模块5;空间光调制器可编程模块5用于控制铁电空间光调制器16中各个像素的相位调制值,生成与经散射介质17扰乱后光场相共轭的光场。如附图1、附图3和附图6所示,该光场实时探测调控装置的探测调控过程包括光场探测和光场聚焦,具体如下:在光场探测过程中,将激光器18发出的光束透过半波片19后由偏振分光棱镜20分光,半波片19用于调节透射光和反射光的光强比例,其中透射光通过反射镜21反射和透镜22聚焦后照射在散射介质17上,光束经散射介质17散射后通过透镜23收集;经偏振分光棱镜20分光后的反射光经过半波片24将偏振方向调整为与透射光一致,然后经扩束系统25扩束和反射镜26反射后作为参考光;所生成的参考光与透镜23收集后的光场通过分光棱镜27合束产生干涉光场;所产生的干涉光场通过分光棱镜28反射后成像在cmos图像传感器7上;图像传感器可编程模块4发出控制指令控制cmos图像传感器7采集干涉光场图像信息,并对采集到的干涉光场图像信息进行分析处理,解算出经散射介质17扰乱后的光场的相位值,同时生成用于调控铁电空间光调制器16的调制图案信息;高速通信模块6将图像传感器可编程模块4中生成的调制图案信息传输至空间光调制器可编程模块5;空间光调制器可编程模块5控制铁电空间光调制器16中各个像素的调制相位,进而将照射在其上的光场反射后形成与经散射介质17扰乱后光场相共轭的光场,其中铁电空间光调制器16放置在与cmos图像传感器7共轭的位置处。
18.在光场聚焦过程中,将铁电空间光调制器16调控后的光场反向输入至散射介质17,并将透过散射介质17的光场经透镜22收集、分光棱镜29反射和透镜30聚焦后,由摄像机15观测聚焦效果,聚焦效果如图7所示。图7(a)为光场未经调控时散射介质后的散斑图像,图7(b)为现有光场调控方法调控后得到的聚焦图像,在cmos图像传感器7拍摄散斑光场后需要将数据传回计算机进行运算,然后再通过计算机产生对铁电空间光调制器的控制信号来对光场进行调控,由于光场的数据信息量非常大,而且整个系统通信链路过长,大量原始图像数据的传输需要消耗大量时间,导致系统响应速度很慢,极限速度约为10 ms,因此针对如生物组织这样的高速动态变化的散射介质难以实现光场的实时高对比度聚焦。具体的效果如图7(b)所示,背景中仍存在多处散斑,并且聚焦光斑的亮度很低,导致其难以满足高分辨光学成像的需求。7(c)为经过本实施例光场实时调控方法与装置调控后得到的动态散射介质聚焦图像,可以得到,其聚焦光斑的对比度显著优于图7(b)中的聚焦光斑。使用本实施例光场实时调控装置对散射介质聚焦时,图像传感器可编程模块4控制cmos图像传感器7采集光场信息的时间为0.5 ms,图像传感器可编程模块4处理光场信息并生成铁电空间光调制器16的调制图案所需的时间小于1
ꢀµ
s,高速通信模块6将调制图案传输至空间光调制器可编程模块5所需的时间小于50
ꢀµ
s,空间光调制器可编程模块5控制铁电空间光调制器16调控光场所需的时间约为0.2 ms 。因此,本实施例光场实时探测调控装置对散射介质聚焦的时间小于0.8 ms,相比于现有光场调控方法提高了一个数量级,因此能在透过高速变化的散射介质后得到一个对比度更高的聚焦光斑。
19.以上结合附图对本发明的具体实施方式作了说明,但这些说明不能被理解为限制了本发明的适用范围,本发明的保护范围由随附的权利要求书限定,任何在本发明权利要求基础上的改动都是本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。