1.本发明具体涉及到一种用于光频域偏振串音测量的光源扫频非线性校正方法,属于光纤测试领域。
背景技术:
2.保偏光纤作为一种特种光纤,它于1978年被贝尔实验室的stolen等首次提出,它通过在光纤几何尺寸上的设计,产生了更强烈的双折射效应,从而解决了普通单模光纤中传输光的偏振态难以控制和保持的难题,由于其能够抑制干涉仪中发生的偏振衰落现象,其给光纤陀螺的性能提升带来了新的发展契机,随后基于保偏光纤的各种光纤偏振器件和组件被陆续的提出,而光纤偏振器件和组件的偏振串音是指两个正交偏振模式在微扰点发生的相互能量耦合现象,它是光纤偏振器件和组件的固有性能和环境影响的综合体现,通过对光纤偏振器件和组件的偏振串音进行测试能够有效的诊断和评估光纤偏振器件和组件的性能。
3.偏振串音测量经常使用的技术被称为光学相干域偏振串音测量技术(ocdp),其空间分辨率,动态范围,测量长度分别能达到9cm,90db以及12km,但是由于其使用扫描式白光干涉仪进行光程补偿来实现不用偏振模式间的干涉,所以使得光学相干域偏振测量技术的测量精度受限于测量速度,导致其测量速度很慢。所以就提出了光频域测量原理和白光干涉原理相结合的技术,光频域偏振串音测量技术(ofdp),其使用可调谐激光器的线性扫频取代光学相干域偏振串音测量技术中的扫描式白光干涉仪来实现不同偏振耦合模式间的干涉,具体过程是经过可调谐激光器发出的光先通过待测器件随后通过带有一定臂长差的干涉仪之后被探测器所接收,由于干涉仪具有一定的臂长差所以上下两臂的频率不等,所以产生的为拍频信号,此时信号的频率就对应于待测器件上偏振串音的位置,再通过傅里叶变换,将拍频信号变换到频域,就可以根据拍频的大小和幅度,确定偏振串音的位置和大小。
4.而使用光频域偏振串音测量技术,偏振串音的测量速度和精度就只与激光器的线性扫频相关,而在光频域偏振串音测量技术中,可调谐激光器经常存在扫频非线性现象,具体的表现为激光器在扫频过程中频率不再随时间线性变化,这造成在进行傅里叶变换将时域拍频信号转换为频域后,拍频信号的实际频率在其真实频率附近波动,造成频域上的峰值在不同程度上的展宽,造成系统的测量分辨率以及动态范围的恶化,从而对系统的测量精度造成很大的影响。
5.针对校正可调谐激光器扫频非线性的研究,在2005年luna公司的brain j.soller等提出了使用辅助干涉仪产生辅助干涉信号作为采集卡的外部时钟,从而实现对主干涉信号的等间隔采样,校正主干涉信号的扫频非线性(brain j.soller,et al,optics express vol.12,no.2),但是硬件重采样方法的最大测量长度仅为辅助干涉仪的长度的一半,在进行长距离测试的时候受到了极大的限制。
6.软件方法的光路结构与硬件的完全相同,唯一不同的地方在于首先对信号进行采
集,再利用算法对数据进行处理从而校正激光器的激光器的非线性的扫频。
7.在2011年天津大学的刘铁根等提出了使用非均匀快速傅里叶变换技术(一种抑制光频域反射仪的激光器非线性扫描装置和方法201110226965.9)对主干涉仪的拍频信息进行处理,从而极大的抑制了光源的扫频非线性,并且降低了传统硬件重采样的复杂程度,但是使用该方法在校正长度较长的情况下会急剧恶化。
8.在2013年天津大学的丁振扬等人提出使用去斜滤波器的方法去校正激光器的扫频非线性(z.ding,et al.optics express vol.21,no.3),但是需要对非线性相位有准确的估计。
9.在2019年南京大学张旭平等人使用过零点检测,对信号进行重采样的方法,校正了激光器的扫频非线性(一种光频域反射计中校正可调谐激光器扫频非线性的方法201910084695.9),但是这一方法对采集卡的采样率要求仍然较高。在2021年,其又提出了过零点检测与硬件时钟校正相结合方法,进一步提高了校正准确度和数据处理的运算速度(用于校正非线性调谐效应的光纤参数测量装置202110135197.x),但是这一方法需要在辅助干涉仪中接入一个声光调制器,提高了校正的复杂度。
10.针对以上方法存在的问题,本发明提供了一种光频域偏振串音测量系统校正光源扫频非线性的方法,能够很好的平衡测量距离、运算复杂度、补偿效果之间的关系,其首先求解辅助干涉仪的相位,对其进行划分,然后根据划分的相位段进行插值,重新得到以相位为自变量关于时间的函数,再结合主干涉信号和辅助干涉信号在采集时的采集时延对主干涉信号进行时域的插值从而校正激光器的扫频非线性,其通过计算主干涉信号与辅助干涉信号之间的延时,从而进一步解决在使用辅助干涉信号对主干涉信号进行相位校正时,由于采集时延所带来的额外非线性误差,进一步提高了系统的空间分辨率和动态范围,从而有效的提高了系统的测量精度,可以广泛的用于光频域测量领域。
技术实现要素:
11.本发明的目的在于提供一种用于光频域偏振串音测量的光源扫频非线性校正方法,该方法可以有效校正在光频域偏振串音测量中所使用的可调谐激光器的扫频非线性,提升系统的空间分辨率和动态范围,从而进一步提升系统的测量精度。
12.本发明公开了一种用于光频域偏振串音测量的光源扫频非线性校正方法,所述的光频域偏振串音测量所使用的光频域偏振串音测量系统包括依次连接的光源10、待测器件模块20、主干涉仪模块30,主干涉仪模块30产生主干涉信号i
main
(t),其特征在于,同时也设置了辅助干涉仪模块40,辅助干涉仪模块40生成用于校正主干涉信号i
main
(t)的辅助干涉信号i
aux
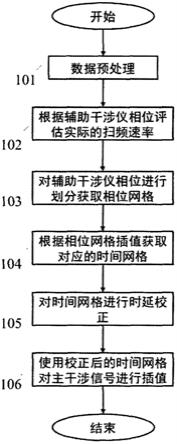
(t),所述的校正光源扫频非线性的方法,其特征在于,该方法包括以下步骤:
13.步骤一101是数据预处理,包括测量并记录光频域偏振串音测量系统所生成的主干涉信号i
main
(t)和辅助干涉信号i
aux
(t),待测器件22的光程差δl1,主干涉仪模块30光程差δl2,辅助干涉仪模块40光程差δl3,记录真空中的光速c,计算附加延迟常数t
d
,计算辅助干涉仪相位关于时间的关系
14.步骤二102根据辅助干涉仪相位关于时间的关系评估实际的扫频速率γ0(t);
15.步骤三103对进行网格划分,根据辅助干涉仪相位关于时间的关系计
算辅助干涉仪相位的最大值,对其进行相位划分,得到划分间隔为的相位网格
16.步骤四104利用插值方法根据相位网格对进行插值间隔为的插值,重新得到时间关于相位的时间网格
17.步骤五105根据步骤一(101)中所得到的附加延迟常数t
d
对时间网格进行时延校正,计算得到插值函数t
rd
=t
r
t
d
;
18.步骤六106利用插值方法根据插值函数t
rd
对主干涉信号i
main
(t)进行插值得到插值后的主干涉信号i
main
(t
rd
);
19.根据权利要求1步骤一101所述的计算附加延迟常数t
d
,其特征在于:
20.计算主干涉信号i
main
(t)和辅助干涉信号i
aux
(t)的采集时间差;
21.根据权利要求1步骤一101所述的计算辅助干涉仪相位关于时间的关系其特征在于,以下的具体步骤:
22.对已经记录的辅助干涉信号i
aux
(t)进行希尔伯特变换,得到辅助干涉仪相位关于时间的函数关系
23.根据权利要求1步骤二102所述的评估实际的扫频速率γ0(t),其特征在于,以下的具体步骤:
24.根据辅助干涉仪相位关于时间的函数关系对时间求微分,得到的角频率进而可以得到扫频速率γ0(t)=ωc/2πδl3;
25.根据权利要求1步骤三103所述的相位划分,其特征在于,以下的具体步骤:
26.计算所需的采集时间间隔t=1/{[(δl1 δl2)/c]
·
2γ0(t)},根据计算得到的角频率ω以及所需的采集时间间隔t,计算相位划分的间隔从而进行相位划分;
[0027]
根据权利要求1步骤四104所述的插值方法,其特征在于:
[0028]
所述的插值方法为样条插值;
[0029]
根据权利要求1步骤六106所述的插值方法,其特征在于:
[0030]
所述的插值方法为样条插值。
[0031]
本发明公开了一种用于光频域偏振串音测量的光源扫频非线性校正方法,适用于光频域测量,在一般的光频域偏振串音测量中,由于激光器扫频非线性的影响会造成最后的测量结果出现脉冲展宽从而造成混叠等劣化测量结果的情况,进而极大的影响测量的精度,而传统的硬件校正方法局限性过大无法针对多种实际情况去实现灵活调整,还会对测量的长度造成较大的限制,此外目前的多种软件校正方法又各自存在相应的局限性,例如非均匀傅里叶变换在测量长度过长的情况下效果大幅下降,过零点检测数据量大且对采集卡采样率要求较高等,且上述的软件校正的方法也都没有考虑过使用辅助干涉信号对主干涉信号进行校正时,二者之间的采集时延对校正结果的影响。
[0032]
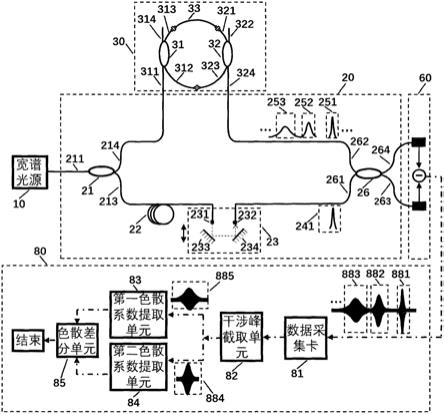
所以本发明提出了一种用于光频域偏振串音测量的光源扫频非线校正性方法,图2是具有校正功能的光频域偏振串音测量系统,光由光源10发出经耦合器分光后一束经过待测器件20后通过主干涉仪30生成主干涉信号被采集模块50所采集,另一束经过辅助干涉仪40后生成辅助干涉信号后同样被采集模块50所采集,所述的方法首先对辅助干涉信号进
行相位划分,之后进行插值得到插值后的以相位为自变量,相位和时间的函数,在结合辅助干涉信号和主干涉信号之间的时延,对主干涉信号在时域进行插值校正其中的扫频非线性,从而提高了测量系统的动态范围和空间分辨率。
[0033]
与现有技术相比,本发明的优点在于:
[0034]
(1)待测器件长度不受辅助干涉仪臂长差的限制,且进行数据采集的时候所采集的数据量较小,降低了系统对采集卡采样率的要求。
[0035]
(2)在对光源的扫频非线性的补偿过程中,避免了在采集辅助干涉信号与主干涉信号时二者之间存在的采集时延对补偿结果的影响,进一步提升了光源非线性补偿的效果,同时进一步提高了测量精度。
附图说明
[0036]
图1是一种用于光频域偏振串音测量的光源扫频非线性校正方法流程图;
[0037]
图2是光频域偏振串音测量系统的装置图;
[0038]
图3是未对主干涉信号进行校正时的测量结果;
[0039]
图4是对主干涉信号进行校正时不额外增加附加延时常数t
d
的校正结果;
[0040]
图5是是对主干涉信号进行校正时不额外增加附加延时常数t
d
的校正结果的局部放大图;
[0041]
图6是对主干涉信号进行校正时额外增加附加延时常数t
d
的校正结果;
[0042]
图7是对主干涉信号进行校正时额外增加附加延时常数t
d
的校正结果的局部放大图。
具体实施方式
[0043]
为清楚地说明本发明一种用于光频域偏振串音测量的光源扫频非线性校正方法,结合实例和附图对本发明作进一步说明,但不应以此限制本发明的保护范围。
[0044]
实施例1
[0045]
在本实施方案中,使用采集卡对主干涉信号进行等时间间隔采样,激光器发出的光通过主干涉仪的参考路和测量路后发生拍频,将拍频信号通过傅里叶变换从时域变换到频域之后,理想情况下,会不同的频率得到对应的带有待测器件特征的单频信号,但是由于激光器的扫频非线性现象,拍频信号实际上在真实的频率附近波动,这样解出的信号不再是单一频率,而在光频域偏振串音测量系统中,频率和待测器件特征的位置一一对应,所以造成测量精度的大幅下降。
[0046]
所以本发明提出在光频域偏振串音测量系统中加入辅助干涉仪,使用辅助干涉仪的相位与时间的关系,在结合主干涉信号和辅助干涉信号之间的采集时延,补偿激光器的扫频非线性对主干涉信号的影响。
[0047]
如图2所示是本实施方案所使用的光频域偏振串音测量系统,光源10通过第一耦合器11分为两束,分光为99的一束通过起偏器21注入待测器件22,后经过检偏器23后注入到第二耦合器31中分束,分别经过主干涉仪上臂32和主干涉仪下臂33,在第三耦合器34合束后被第一差分探测器35接收,分光为1的另一束注入第四耦合器41分束分别经过辅助干涉仪上臂42和辅助干涉仪下臂43,在第五耦合器44合束后被第二差分探测器45接收,采集
卡51分别采集第一差分探测器35和第二差分探测器45所输出的信号,后送入计算机52使用如本发明所述的校正方法对激光器的扫频非线性进行校正。
[0048]
利用本发明所述的光源扫频非线性的校正方法结合上述光偏振串音测量系统对一个l1=1800m的光纤环进行测试。所使用的实验系统为上述光频域偏振串音测量系统,所用光源10扫频范围1510
‑
1620nm,扫频速度80nm/s,主干涉仪臂长差为l2=3m,辅助干涉仪臂长差为l3=5m,保偏线性双折射δn=5
×
10
‑4,单模光纤的折射率n=1.456,采集卡采样率为11.25mhz/s,第一耦合器分光比为1∶99,第二耦合器,第三耦合器,第四耦合器,第五耦合器分光比均为50∶50,具体校正流程如下。
[0049]
首先,在对数据进行校正之前,首先进行数据预处理,即为测量并记录光频域偏振串音测量系统所生成的主干涉信号i
main
(t)和辅助干涉信号i
aux
(t),记录待测器件22的光程差δl1=l1δn=0.9m,主干涉仪模块30光程差δl2=l2n=4.368m,辅助干涉仪模块40光程差δl3=l3n=7.28m,记录扫频速度γ0=80nm/s,真空中的光速c=3
×
108m/s,计算主干涉信号与辅助干涉信号的采集时间差得到附加延时常数t
d
=9.2
×
10
‑6;
[0050]
对所采集的辅助干涉信号i
aux
(t)进行相位计算,此处可选用的相位计算方法有,iq解调,希尔伯特变换等,这里使用的为比较通用且较为简单的希尔伯特变换法,之后对希尔伯特变换后的信号求解相角,后解卷绕,从而得到辅助干涉仪相位随时间的变化关系如果激光器的扫频是线性的,那么根据该关系得到的相位随时间变化的曲线应该是线性的,很显然在实际情况下,由于激光器的扫频非线性,这条曲线是在固定斜率下存在波动的;
[0051]
根据估计激光器的实际扫频速率γ0(t),首先对时间求微分,得到进而得到扫频速率带入已知量得到
[0052]
其次对进行相位上的划分,具体划分过程为首先计算出所对应的最大相位值为其次计算的角频率ω=2nγ0(t)δl3/c以及计算所需的采集时间间隔t=1/{[(δl1 δl2)/c]
·
2γ0(t)},从而得到相位划分间隔为的相位网格
[0053]
第三步,根据所划分的相位间隔所对应的相位网格对时间t进行插值,插值后重新得到时间关于相位的函数此时可以知道,相位已经变成了自变量,并且是线性变化的。此处的插值方法可选用线性插值、样条插值等,样条插值是比较合适的,其效果最好;
[0054]
第四步,根据第三步得到的时间关于相位的函数和第一步得到的附加延时常数t
d
计算得到插值函数此处是为了避免由于采集卡的采集不同步对补偿效果造成不利的影响,降低精度;
[0055]
第五步,根据插值函数t
rd
=t
r
t
d
对所记录的主干涉信号i
main
(t)进行插值,虽然t
rd
是不规律,但是由上面的步骤可以知道,其对应的相位是线性变化的,这样在对主干涉信号进行插值之后,我们就可以实现相位随时间的连续变化,从而实现了对激光器的扫频非线性的校正。
[0056]
如图3中的501所示是未校正扫频非线性的主干涉信号,由于激光器扫频非线性的影响可以看出待测光纤环的所有特征已经由于激光器扫频非线性带来的频率波动变成了一个包络的形状,所有的特征都已经无法区分,空间分辨率已经劣化到了一个相当严重的水平且动态范围只有45db左右,如图4所示的601是在只使用t
r
对主干涉信号进行插值后实现对激光器的扫频非线性的校正,不添加附加延迟常数t
d
得到的结果,可以发现不仅动态范围提升到了80db左右,而且空间分辨率同样有所提升,特征信息已经不再是一个包络,能够初步的分辨,但是所显示的特征与待测光纤环的实际特征还是存在较大的差别,放到主峰附近的图形如图5中的602所示,可以发现仍然存在许多由于激光器扫频非线性所带来的频率波动,这说明激光器的扫频非线性还未被完全的校正,仍在存在频率的抖动导致测量结果的不准确,如图6中所示的701是添加了附加延迟常数t
d
得到插值函数t
rd
,再使用t
rd
对主干涉信号进行插值从而实现对激光器的扫频非线性的校正后得到的结果,可以看出待测器件的特征已经清晰明了,动态范围提升到了100db左右,放大主峰附近的图形如图7中的703所示,可以看出对比602,图形更加平坦且已经基本上没有杂散峰,并且所显示的特征信息已经和待测光纤环基本一致,所示的702为测试过程中光路所带来的杂散峰。实验结果表明:该方法很大程度上抑制了激光器的扫频非线性,极大的提高了系统的空间分辨率和动态范围。
[0057]
以上所述仅为本发明的部分实施方式,应当指出,对本技术领域的人员来说,在不脱离本发明原理的基础上对其进行一定的改进,这些改进也应该视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。