技术特征:
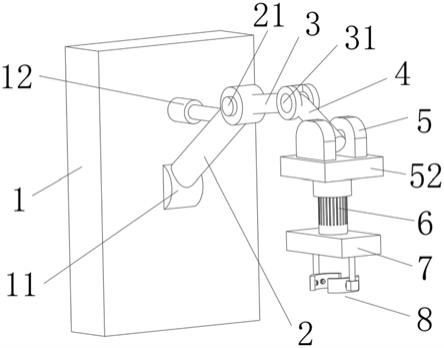
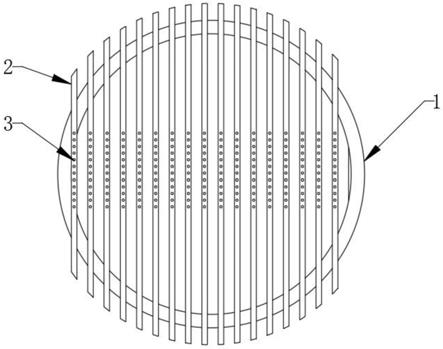
1.一种多角度喷漆工业机器人,包括:支撑架(1),其特征在于,所述支撑架(1)中央设置有限位转轴(11),所述限位转轴(11)上方设置有伸缩推杆(12),所述限位转轴(11)上设置有高度调节臂(2),所述高度调节臂(2)顶端设置有角度调节转轴(21),所述高度调节臂(2)远离限位转轴(11)的一端设置有角度调节臂(3),所述角度调节臂(3)远离高度调节臂(2)的一端设置有位置调节转轴(31),所述位置调节转轴(31)上设置有位置调节臂(4),所述位置调节臂(4)底端设置有竖直限位器(5),所述竖直限位器(5)中央设置有限位轴(51),所述竖直限位器(5)底端设置有连接块(52),所述竖直限位器(5)底端设置有转动电机(6),所述转动电机(6)底端设置有间距控制块(7),所述间距控制块(7)内部设置有间距调节螺杆(71),所述间距控制块(7)下方设置有喷漆机构(8),所述喷漆机构(8)顶端设置有连接轴(81),所述连接轴(81)底端设置有支撑杆(82),所述支撑杆(82)底端设置有弧形喷漆板(83),所述弧形喷漆板(83)内部设置有若干喷嘴(84)。2.根据权利要求1所述的一种多角度喷漆工业机器人,其特征在于,所述支撑架(1)通过限位转轴(11)和伸缩推杆(12)与高度调节臂(2)连接,所述伸缩推杆(12)伸缩在限位转轴(11)的限制下,调节高度调节臂(2)顶端的高度。3.根据权利要求1所述的一种多角度喷漆工业机器人,其特征在于,所述角度调节臂(3)通过角度调节转轴(21)的转动调节角度调节臂(3)轴心线和水平面之间的夹角。4.根据权利要求1所述的一种多角度喷漆工业机器人,其特征在于,所述位置调节臂(4)通过限位轴(51)和竖直限位器(5)之间连接,所述位置调节臂(4)通过位置调节转轴(31)调节位置调节臂(4)和水平面之间的夹角。5.根据权利要求1所述的一种多角度喷漆工业机器人,其特征在于,所述竖直限位器(5)通过连接块(52)和转动电机(6)连接,所述转动电机(6)带动间距控制块(7)转动。6.根据权利要求1所述的一种多角度喷漆工业机器人,其特征在于,所述间距调节螺杆(71)两端分别设置有旋转方向相反的外螺纹,所述连接轴(81)内部设置有与间距调节螺杆(71)的外螺纹相啮合的内螺纹。
技术总结
本实用新型公开了一种多角度喷漆工业机器人,涉及到工业机器人技术领域。包括:支撑架、高度调节臂、角度调节臂、位置调节臂、竖直限位器、转动电机、间距控制块、间距调节螺杆、喷漆机构。有益效果:通过高度调节臂对喷漆位置进行大致的调节后通过角度调节臂对喷漆位置进行微调,最后通过位置调节臂对喷漆位置进行精确固定,使得喷漆工业机器人不会产生喷漆不均匀、喷漆位置错误等问题,提高喷漆的良品率;由于间距调节螺杆两端分别设置有旋转方向相反的外螺纹,并且连接轴内部设置有与之相啮合的内螺纹,使得间距调节螺杆转动调节调节弧形喷漆板至合适位置后在转动电机的带动下进行多角度的喷漆,使得喷漆效果均匀美观。使得喷漆效果均匀美观。使得喷漆效果均匀美观。
技术研发人员:詹茂炅
受保护的技术使用者:苏州机目科技有限公司
技术研发日:2021.07.23
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。