1.本实用新型涉及测斜仪,尤其涉及一种基于机器视觉的测斜仪。
背景技术:
2.测斜仪作为一种精密监测设备在水利、房建、港口等土木工程有着广泛的应用,准确地监测工程结构的倾斜角度对于掌握结构的变形特征和发展规律、保证工程安全稳定起着至关重要的作用。
3.传统测斜仪需要人工现场操作仪器,不仅效率低、成本高、数据采集过程繁琐,而且无法远程实时监控数据,在出现紧急状况时,工程的安全性不能得到保证。
4.因此,亟待解决上述问题。
技术实现要素:
5.实用新型目的:本实用新型的目的在于提出一种有效提高观测液面倾斜变化时直观性的基于机器视觉的测斜仪,满足了高精度、低成本、实时监测与复核的需求。
6.技术方案:为实现以上目的,本实用新型公开了一种基于机器视觉的测斜仪,包括敞口式储液罐、位于储液罐顶部外侧边且与储液罐水平面相平行的环形滑槽、位于环形滑槽内可自由滑动的钢球、位于储液罐顶部中心处正上方且用于采集图像并传输至控制系统的摄像组件以及与摄像组件相连接用于控制摄像组件采集图像并输出的控制系统;其中摄像组件采集储液罐液位图像和钢球位置图像,并传输至控制系统并输出。
7.其中,所述摄像组件包括镜头垂直向下正对储液罐轴向中心的摄像头和位于摄像头两侧的红外补光灯。
8.优选的,所述控制系统包括控制芯片、带可拆卸密封顶板且用于封装控制芯片的保护盒、用于连接控制芯片和摄像头的连接螺丝以及用于传输图像的数据传输带。
9.再者,所述控制芯片上还连接有便于充电的移动式低压电源。
10.进一步,所述控制芯片上还连接有用于将采集图像传输至外部图像处理系统的无线传输模块。
11.优选的,还包括用于封装储液罐、摄像组件和控制系统的柱状金属壳体。
12.再者,包括位于柱状金属壳体下方用于支撑的金属支架和穿设于金属支架上用于调节高度的调平螺杆。
13.有益效果:与现有技术相比,本实用新型具有以下优点:
14.(1)、本实用新型中采用敞口式储液罐、水平的环形滑槽以及可自由滑动的钢珠的组合结构,提高了观测液面倾斜变化时的直观性,解决了摄像机拍摄视角带来的液面读数误差问题;采用摄像机拍摄储液罐上表面液面图像和钢珠位置图像并输出,方便后续图像处理,获得建筑物倾斜角度和倾斜方向状况,进一步提高观测精度;同时满足了高精度、低成本、实时自动化采集信息的工程需求;
15.(2)、本实用新型结构简单,克服了以往测斜仪对处于绝对水平位置的要求,在倾
斜变形条件下仍可正常使用,现场安置仪器只需初次调平即可,后续监测可达到自动化操作。
附图说明
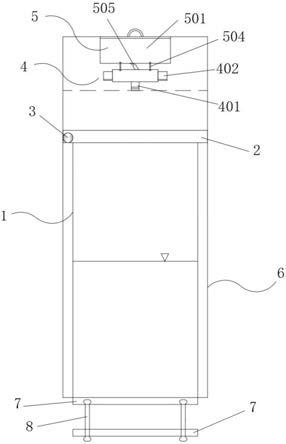
16.图1为本实用新型的结构示意图;
17.图2为本实用新型的俯视图;
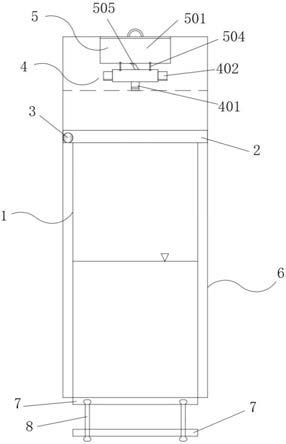
18.图3为本实用新型倾斜状态下的结构示意图;
19.图4为本实用新型中液位计算的原理图。
具体实施方式
20.下面结合附图对本实用新型的技术方案作进一步说明。
21.如图1和图2所示,本实用新型一种基于机器视觉的测斜仪包括储液罐1、环形滑槽2、钢球3、摄像组件4、控制系统5、柱状金属壳体6、金属支架7和调平螺杆8。柱状金属壳体6用于封装储液罐、摄像组件和控制系统,金属支架7位于柱状金属壳体下方,金属支架7起到支撑作用,调平螺杆8穿设于金属支架7上用于调平和调节高度。
22.储液罐1为敞口式储液罐,环形滑槽2位于储液罐顶部外侧边,且环形滑槽水平设置,与调平状态下的储液罐水平面相平行,钢球3位于环形滑槽2内可自由滑动。如图 3所示,本实用新型中基于机器视觉的测斜仪在发生倾斜时,钢球3在重力作用下沿环形滑槽2自由滑动至最低点处,储液罐1内液面仍保持水平,相对于摄像头的液面最高点与储液罐1交点为b,相对于摄像头的液面最低点与储液罐1交点为c,过b点和c点作垂直于仪器轴线的虚拟平面,b点和c点连线为水平面,两个虚拟平面与摄像头的距离为d1和d2,虚拟平面与水平面成角θ。如图4所示,在发生倾斜时,图像采集到的液面形状为不规则圆形,钢球3在图像中圆心点为a,过a点和图像中心点做直线l,直线 l与液面的不规则圆形成像相交于点b和点c,虚拟平面成像分别为半径为r1和半径为r2的虚拟圆形。本实用新型将建筑物的倾斜变化转化为工业相机易观测的水平液面变化和钢球的位置变化,解决工业相机拍摄视角带来的液面读数误差问题。
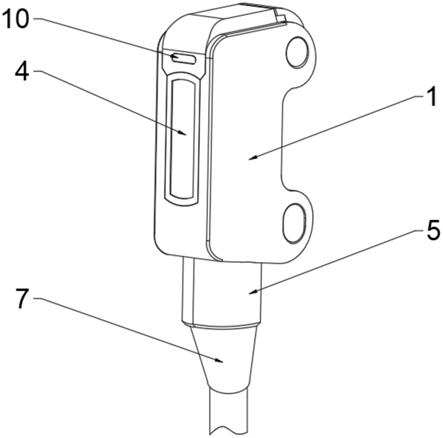
23.摄像组件4位于储液罐顶部中心处正上方且用于采集图像并传输至控制系统,摄像组件4包括摄像头401和红外补光灯402,其中摄像头401的镜头垂直向下正对储液罐轴向中心,红外补光灯402位于摄像头两侧,为摄像头进行补光。
24.控制系统5与摄像组件4相连接,控制系统5用于控制摄像组件4采集图像并输出图像;其中摄像组件4采集储液罐液位图像和钢球位置图像,并传输至控制系统5并输出。控制系统5包括控制芯片501、保护盒503、连接螺丝504、数据传输带505、移动式低压电源和无线传输模块,保护盒503用于封装控制芯片501、保护盒的顶部设有可拆卸式的密封顶板502,方便维修位于保护盒内的控制芯片;连接螺丝504用于连接控制保护盒503和摄像组件4,数据传输带505用于连接摄像头和控制芯片,用于将控制芯片的拍摄信号传输至摄像头,再将摄像头所拍摄的图像传输至控制芯片内。控制芯片上连接有移动式低压电源,可实现便携式充电。无线传输模块与控制芯片相连接,无线传输模块用于将采集图像传输至外部图像处理系统。本实用新型中外部图像处理系统发出拍摄信号,并传输至控制芯片,控制摄像头进行拍摄,拍摄完图像后再将采集图像传输至控制芯片,控制芯片通过无线传输模块传输
至外部图像处理系统,便于后续图像处理系统进行图像处理分析,可对真实沉降量加以修正,同时获得建筑物的倾斜角度和倾斜方向。图像处理系统采用计算机程序,执行下面的分析处理步骤,其中图像处理系统的分析处理步骤为:
25.(1)、图像预处理:图像处理系统对所采集图像进行图像滤波、灰度化处理,得到预处理图像;
26.(2)、图像定位:将预处理图像与钢珠模板进行匹配,定位钢珠位置,确定其中心点a;
27.(3)、液面定位:采用canny边缘检测方法处理图像,经去除噪声、计算梯度、非极大值抑制和确定边缘得到显示图像边缘的目标图像;
28.(4)、倾斜方位a:当仪器发生倾斜时,位于环形滑槽内部的钢球沿着环形滑槽自由滑动至倾斜最低点处,根据图像中心点坐标(x0,y0)和钢珠模板中心点坐标(x
′
,y
′
)计算得出倾斜方位向量a=(x
′‑
x0,y
′‑
y0),确定仪器倾斜方位;
29.(5)、倾斜角度θ:当仪器发生倾斜时,采集图像中液面边缘为不规则圆形,根据图像中心点坐标(x0,y0)和钢珠模板中心点坐标(x
′
,y
′
)确定直线l,直线l与液面边缘相交于液面最高处点b和液面最低处点c;根据确定的液面最高处点b和液面最低处点c分别绘制虚拟成像圆环,并确定液面最高点虚拟成像圆环半径r1和液面最低点虚拟成像圆环半径r2;
30.根据高斯成像原理确定成像半径r和成像距离d之间的关系,计算得到液面最高点b 的成像距离d1和液面最高点c的成像距离d2:
[0031][0032]
其中:d——储液罐直径;
[0033]
f——摄像头焦距;
[0034]
根据倾斜液面几何关系计算当前倾斜角度θ:
[0035][0036]
本实用新型一种基于机器视觉的测斜仪的测量方法,包括如下步骤:
[0037]
(1)、安平仪器:将测斜仪置于测量点上,打开控制系统电源,远程连接到控制系统,观测图像,调节调平螺栓使成像液面为正圆形;
[0038]
(2)、图像采集:控制芯片接收外部控制命令后,控制摄像头拍摄液位图像并通过无线传输模块回传图像;
[0039]
(3)、图像预处理:图像处理系统对所采集图像进行图像滤波、灰度化处理,得到预处理图像;
[0040]
(4)、图像定位:将预处理图像与钢珠模板进行匹配,定位钢珠位置,确定其中心点a;
[0041]
(5)、液面定位:采用canny边缘检测方法处理图像,经去除噪声、计算梯度、非极大值抑制和确定边缘得到显示图像边缘的目标图像;
[0042]
(6)、倾斜方位a:当仪器发生倾斜时,位于环形滑槽内部的钢球沿着环形滑槽自由滑动至倾斜最低点处,根据图像中心点坐标(x0,y0)和钢珠模板中心点坐标(x
′
,y
′
)计算得出倾斜方位向量a=(x
′‑
x0,y
′‑
y0),确定仪器倾斜方位;
[0043]
(7)、倾斜角度θ:当仪器发生倾斜时,采集图像中液面边缘为不规则圆形,根据图
像中心点坐标(x0,y0)和钢珠模板中心点坐标(x
′
,y
′
)确定直线l,直线l与液面边缘相交于液面最高处点b和液面最低处点c;根据确定的液面最高处点b和液面最低处点c分别绘制虚拟成像圆环,并确定液面最高点虚拟成像圆环半径r1和液面最低点虚拟成像圆环半径r2;
[0044]
根据高斯成像原理确定成像半径r和成像距离d之间的关系,计算得到液面最高点b 的成像距离d1和液面最高点c的成像距离d2:
[0045][0046]
其中:d——储液罐直径;
[0047]
f——摄像头焦距;
[0048]
根据倾斜液面几何关系计算当前倾斜角度θ:
[0049]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。