一种测量ldi内层对位精度的装置
技术领域
1.本实用新型涉及直接成像设备对位技术,特别涉及一种测量ldi内层对位精度的装置。
背景技术:
2.目前印刷电路板(pcb)随着电子产品的兴起越来越精密,对多层线路板的需求也逐渐提升。多层线路板的良率大程度依赖于内层板的制作精度。在内层制造工艺中,最重要工艺之一是菲林曝光。该工艺存在菲林涨缩、对位精度难以再度提升、打样流程繁琐等众多缺点,已逐渐由激光直写曝光(ldi)工艺取代。
3.ldi在机构、软件、成本方面存在限制,目前还未能突破直接双面曝光,造成内层板需要翻面曝光。内层板双面没有孔和靶点,给双面对准带来挑战。在内层曝光时,先曝其中一面(a面),在另一面(b面)边料上打上靶点;当翻板到b面曝光时,可用对位系统对靶点识别,实现双面对准。然而机构台面、打靶点、翻板等皆会引入误差,这些误差大多为系统误差,可采用补偿的方式对其减小。本实用新型提供了一种测量ldi内层对位精度的方法及其实现的装置,可以随时方便快捷地获取误差补偿值,减弱机构、靶点等对内层对位的影响。
技术实现要素:
4.本实用新型的目的是针对现有技术的上述缺陷,提供一种测量ldi内层对位精度的装置。
5.为解决现有技术的上述缺陷,本实用新型提供的技术方案是:一种测量ldi内层对位精度的装置,包括基座,所述基座上设有xyz移动台、由该xyz移动台控制移动的吸盘台面和下对准组件,所述吸盘台面的一端设有能够移动的标定靶点,所述基座上还设有支架,所述支架的横梁上设有第一相机和能够水平移动的第二相机,所述吸盘台面的边缘间隔设有多个靶点光源;
6.将内层板放置在所述吸盘台面上,内层板的第一面朝上,激光直接对内层板的第一面图形曝光的同时、所述吸盘台面上的靶点光源对内层板的第二面进行打靶;
7.内层板的第二面图形曝光时、内层板的第二面朝上放置在所述吸盘台面上,所述第一相机、第二相机和下对准组件对内层板进行对位后、再由所述激光直接对内层板的第二面图形曝光。
8.作为本实用新型测量ldi内层对位精度的装置的一种改进,所述下对准组件包括下ccd相机、透反棱镜、远心镜头和反射棱镜,所述下ccd相机与所述远心镜头之间设置所述透反棱镜,所述反射棱镜设置在所述远心镜头上。
9.作为本实用新型测量ldi内层对位精度的装置的一种改进,所述透反棱镜包括有反射面和透射面,所述透反棱镜倾斜45度置于一立方体斜镜座上,所述透反棱镜的表面镀有透反膜,所述透反膜对λ<450nm光波透射,对λ>450nm的光波反射,这里的λ为光波。
10.作为本实用新型测量ldi内层对位精度的装置的一种改进,所述吸盘台面的一端
设有两个对称设置的标定靶点安装板,所述标定靶点安装板通过直线滑轨和滑块连接所述标定靶点,所述标定靶点安装板的端部设有移动气缸,所述移动气缸能够推动所述标定靶点沿着所述直线滑轨移动,所述标定靶点移动寻找与所述下对准组件的同轴位置。
11.作为本实用新型测量ldi内层对位精度的装置的一种改进,内层板进行第一面和第二面曝光时、均需进行标定靶点的对位,所述标定靶点的对位是标定靶点对准所述第二相机和下对准组件的位置,先确认好第二相机和下对准组件相对于ldi曝光系统坐标系的旋转矩阵,再让第二相机和下对准组读取同一靶点,获取上下相机的同轴位置,当所述第二相机、标定靶点和下对准组件三者处于同轴状态下,激光才对内层板进行第一面和第二面曝光;
12.所述第二相机通过伺服电机带动同步轮同步带的方式驱动、使所述第二相机能够沿着直线滑轨上移动寻找不同位置的标定靶点。
13.作为本实用新型测量ldi内层对位精度的装置的一种改进,将已曝光好的内层板重新置于所述吸盘台面上,由第二相机和下对准组件获取视场内的靶点图形位置,经与内层板的第一面和第二面的预设位置进行比较,获取到内层对位误差。
14.作为本实用新型测量ldi内层对位精度的装置的一种改进,所述激光波段均为紫外波段,靶点光源所用的照明光源为红光、绿光或红外光。
15.作为本实用新型测量ldi内层对位精度的装置的一种改进,所述xyz移动台包括x轴移动模组、y轴移动模组和z轴移动模组,所述y轴移动模组由x轴移动模组控制x向移动,z轴移动模组由y轴移动模组控制y向移动,z轴移动模组控制整个吸盘台面的升降;
16.所述x轴移动模组、y轴移动模组和z轴移动模组均包括由伺服电机、传动丝杆和滑轨组件,x轴移动模组通过滑轨组件与y轴移动模组连接,y轴移动模组通过滑轨组件与z轴移动模组连接。
17.与现有技术相比,本实用新型的优点是:本实用新型采用双向对摄抓点的视觉对位方法,抓取内层板上下两面的图形点。图形点由ldi曝光在内层板ab面再经显影蚀刻而得,a面和b面的图形点理论同心。先确认好第二相机和下对准组件相对于ldi曝光系统坐标系的旋转矩阵,再让第二相机和下对准组读取同一靶点,获取上下相机的同轴位置。将所述内层板重置于吸盘台面上测量,先由第二相机确认内层板上的阵列图形点相对于系统的旋转矩阵,即可将第二相机和下对准组件算出的距离偏差转换为内层对位在x、y轴方向上的补偿值,解决了内层对位精度测量问题,同时提升了内层曝光双面对准度。
附图说明
18.下面就根据附图和具体实施方式对本实用新型及其有益的技术效果作进一步详细的描述,其中:
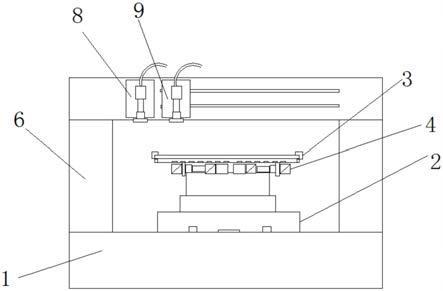
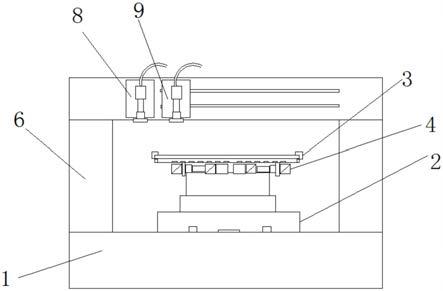
19.图1是本实用新型结构示意图。
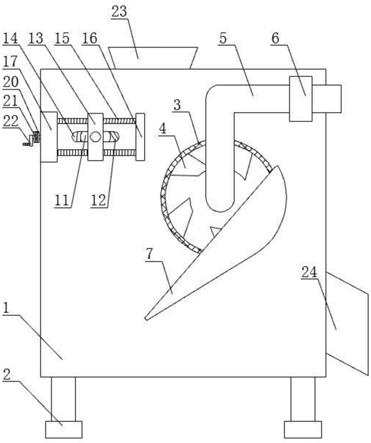
20.图2是本实用新型吸盘台面结构示意图。
21.图3是本实用新型第二相机和下对准组件处于同轴位置的结构示意图。
22.图4是本实用新型旋转矩阵坐标示意图。
23.图5是本实用新型内层板两面同心后结构示意图。
24.附图标记名称:1、基座2、xyz移动台3、吸盘台面4、下对准组件5、标定靶点6、支架
7、横梁8、第一相机9、第二相机10、靶点光源41、下ccd相机42、透反棱镜43、远心镜头44、反射棱镜31、标定靶点安装板32、移动气缸。
具体实施方式
25.下面将结合本实用新型实施例中的附图对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
27.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围内。
28.如图1~图5所示,一种测量ldi内层对位精度的装置,包括基座1,基座1上设有xyz移动台2、由该xyz移动台2控制移动的吸盘台面3和下对准组件4,吸盘台面3的一端设有能够移动的标定靶点5,基座1上还设有支架6,支架6的横梁7上设有第一相机8和能够水平移动的第二相机9,吸盘台面3的边缘间隔设有多个靶点光源10;
29.将内层板放置在吸盘台面3上,内层板的第一面朝上,激光直接对内层板的第一面图形曝光的同时、吸盘台面3上的靶点光源10对内层板的第二面进行打靶;
30.内层板的第二面图形曝光时、内层板的第二面朝上放置在吸盘台面3上,第一相机8、第二相机9和下对准组件4对内层板进行对位后、再由激光直接对内层板的第二面图形曝光。
31.优选的,下对准组件4包括下ccd相机41、透反棱镜42、远心镜头43和反射棱镜44,下ccd相机41与远心镜头43之间设置透反棱镜42,反射棱镜44设置在远心镜头43上。下对准组件4可实现吸盘相机标定的功能,也可用于内层误差测量。
32.优选的,透反棱镜42包括有反射面和透射面,透反棱镜42倾斜45度置于一立方体斜镜座45上,透反棱镜42的表面镀有透反膜,透反膜对λ<450nm光波波段透射,对λ>450nm的光波波段反射,这里的λ为光波。
33.优选的,吸盘台面3的一端设有两个对称设置的标定靶点安装板31,标定靶点安装板31通过直线滑轨和滑块连接标定靶点5,标定靶点安装板31的端部设有移动气缸32,移动气缸32能够推动标定靶点5沿着直线滑轨移动,标定靶点5移动寻找与下对准组件4的同轴位置。移动气缸32可以根据需要设置移动的方向,可以设置成前后移动的方式,也可以设置成左右的移动方式,其工作原理相同。
34.优选的,内层板进行第一面和第二面曝光时、均需进行标定靶点5的对位,标定靶点5的对位是标定靶点对准第二相机9和下对准组件4的位置,先确认好第二相机9和下对准
组件4相对于ldi曝光系统坐标系的旋转矩阵,再让第二相机9和下对准组4读取同一靶点,获取第二相机9和下ccd相机41的同轴位置,当第二相机9、标定靶点5和下对准组件4三者处于同轴状态下,激光才对内层板进行第一面和第二面曝光;
35.第二相机9通过伺服电机带动同步轮同步带的方式驱动、使第二相机9能够沿着直线滑轨上移动寻找不同位置的标定靶点5。第二相机9能够移动寻找不同位置的标定靶点5位置,方便与下对位组件4获取标定靶点位置。
36.优选的,将已曝光好的内层板重新置于吸盘台面3上,由第二相机9和下对准组件4获取视场内的靶点图形位置,经与内层板的第一面和第二面的预设位置进行比较,获取到内层对位误差。
37.优选的,激光波段均为紫外波段,靶点光源11所用的照明光源为红光、绿光或红外光。
38.优选的,xyz移动台2包括x轴移动模组、y轴移动模组和z轴移动模组,y轴移动模组由x轴移动模组控制x向移动,z轴移动模组由y轴移动模组控制y向移动,z轴移动模组控制整个吸盘台面的升降;
39.x轴移动模组、y轴移动模组和z轴移动模组均包括由伺服电机、传动丝杆和滑轨组件,x轴移动模组通过滑轨组件与y轴移动模组连接,y轴移动模组通过滑轨组件与z轴移动模组连接。xyz移动台2三个方向上做高精度运动,构成ldi曝光坐标系的数值来源,足以满足ldi运动及内层误差测量的精度需求。
40.一种测量ldi内层对位精度的方法,包括以下步骤:
41.1)、确认第二相机和下对准组件相对于激光直写曝光系统坐标系的旋转矩阵r;
42.具体方法为:第二相机读取标定靶点5位置,针对标定靶点5在x方向移动一个视野范围内的距离,再读取移动后的靶点位置,根据两个靶点位置计算出旋转矩阵r;两个靶点位置连线与第二相机坐标系x轴的夹角即是旋转矩阵角;
43.2)、激光投射出1~2mm直径的圆形光斑,经由透反棱镜反射进下ccd相机成像,针对圆形光斑在x方向移动一个视野范围内的距离,再读取移动后的圆形光斑位置,根据两个圆形光斑位置计算出旋转矩阵p;
44.3)、第二相机和下对准组件读取标定靶点上的同一靶点,获取到第二相机和下ccd相机41的同轴位置;(如图3所示);
45.4)、将设计好的图形曝光在内层板两面上,第一面和第二面的图形点在理论上同心;(如图5所示);
46.5)、将已蚀刻好的内层板重新置于吸盘台面上,并针对每一次放置都通过第二相机确认内层板上阵列图形点相对于ldi曝光系统坐标系的旋转矩阵s;
47.6)、最后通过第二相机和下对准组件读取内层板上多个相同位置的图形点,将获取到的距离偏差通过旋转矩阵s算出x、y方向的偏差,再求多个图形点的位置平均,即得到可用于内层对位补偿的位置偏差(δx,δy)。
48.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和结构的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同范围限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。