用于监视和控制hvac系统的方法和计算机系统
技术领域
1.本发明涉及一种用于监视和控制hvac(加热、通风、空调和冷却)系统的方法和计算机系统。具体地,本发明涉及一种用于监视和控制hvac系统的计算机实现的方法和计算机系统,该hvac系统包括一个或多个流体运输系统,在每个流体运输系统中具有多个平行区域。
背景技术:
2.用于加热、通风、空调和冷却一个或多个建筑的hvac系统包括一个或多个流体运输系统,用于将液态或气态流体移动到建筑的房间或空间或者通过建筑的房间或空间,以便分配热能。流体运输系统包括具有流体运输管线的回路,例如用于液态流体的管道或用于气态流体的导管,以及流体运输驱动器,例如用于液态流体的泵或用于气态流体的通风机,用于驱动和移动流体运输管线中的流体通过热能源,诸如加热器或冷却器。为了分别调节通过hvac系统或其流体运输系统的流体流量,hvac系统进一步包括可调整的流量控制设备,例如调节液态流体流量的阀或用于调节气态流体流量的阻尼器。在本上下文中,术语“阀”用于指用于液态和气态流体的流量控制设备,并且因此,也意味着包括“阻尼器”。个体阀由具有电机的致动器调整,所述电机与相应的阀机械耦合。hvac系统进一步包括传感器,用于测量流体运输系统的操作变量,诸如流体的温度、流体的流速率、流体的流速度和流体在流体运输系统或在建筑中的各个点处的压力,例如空气温度或其它空气质量参数,诸如湿度、一氧化碳水平、二氧化碳水平或其它挥发性有机化合物(voc)水平等。为了更灵活和更高效地调节温度和热能的分发,hvac系统或它们的流体运输系统分别被划分成平行的区域(“分区”),所述区域例如对应于建筑的楼层和/或房间。为了控制hvac系统及其流体运输系统的总体性能,建筑控制或自动化系统连接到hvac设备,包括致动器、阀、传感器、泵、通风机等。建筑控制系统和hvac设备通常由不同的制造商提供,并且由不同的技术专家安装,并且处于建筑构造或改造的不同阶段。这些各种技术专家在不同阶段的协调以及来自不同制造商的建筑控制系统和hvac设备的集成引起了相当大的后勤和技术复杂性,所述复杂性通常贯穿hvac系统的操作和维护生命周期。
技术实现要素:
3.本发明的一个目的是提供一种用于监视和控制hvac系统的计算机实现的方法和计算机系统,其没有现有技术的至少一些缺点。特别地,本发明的一个目的是提供一种用于监视和控制多区域hvac系统的计算机实现的方法和计算机系统,该方法和计算机系统使得可能监视和改进多区域hvac系统的操作,而不必完全依赖于建筑控制系统。
4.根据本发明,这些目的通过独立权利要求的特征来实现。此外,进一步有利实施例是从从属权利要求和描述得出的。
5.根据本发明,上述目的被特别实现在于:一种监视和控制hvac系统的计算机实现的方法,所述hvac系统包括一个或多个流体运输系统,在每个流体运输系统中具有多个平
行区域,所述方法包括计算机系统的一个或多个处理器,所述一个或多个处理器执行以下步骤:经由通信网络从hvac系统的多个设备接收流体运输系统的多个操作变量;为每个操作变量确定相应操作变量的时间进程;从操作变量的时间进程检测操作变量的时间进程之间的相互依赖性;取决于相互依赖性,将操作变量及其相关联的设备分组成不同的集合,每个集合与hvac系统的不同部分相关,并且包括与hvac系统的不同部分相关的操作变量及其相关联的设备;以及通过执行以下操作中的至少一个使用集合来控制hvac系统,所述操作:使用与hvac系统的特定部分相关的操作变量来控制hvac系统的特定部分的设备,以及使用与hvac系统的特定部分的一个或多个设备相关联的操作变量来生成关于hvac系统的特定部分的一个或多个设备的故障检测消息。
6.取决于操作变量的时间进程之间的相互依赖性,通过将操作变量及其相关联的设备分组成不同的集合,在hvac系统中的可测量变量和有贡献的设备之间确定和定义关系。这使得可能确定hvac系统的哪些设备属于一起,例如它们连接到相同的热能源,而不需要建筑控制或自动化系统,或者能够访问建筑控制或自动化系统的数据。因此,在没有来自建筑控一种监视和控制hvac系统的计算机实现的方法,该hvac系统包括一个或多个流体运输系统,在每个流体运输系统中具有多个平行区域,该方法包括计算机系统的一个或多个处理器,所述一个或多个处理器执行以下步骤:经由通信网络从hvac系统的多个设备接收流体运输系统的多个操作变量;为每个操作变量确定相应操作变量的时间进程;从操作变量的时间进程检测操作变量的时间进程之间的相互依赖性;取决于相互依赖性,将操作变量及其相关联的设备分组成不同的集合,每个集合与hvac系统的不同部分相关,并且包括与hvac系统的不同部分相关的操作变量及其相关联的设备;以及通过以下操作使用集合来控制hvac系统,所述操作:使用与hvac系统的特定部分相关的操作变量来控制hvac系统的特定部分的设备,和/或使用与hvac系统的特定部分的一个或多个设备相关联的操作变量来生成关于hvac系统的特定部分的一个或多个设备的故障检测消息。制或自动化系统的信息的情况下,不仅可能监视、分析和控制个体hvac设备,诸如泵、通风机、加热器、冷却器、致动器、阀、阻尼器、散热器、热交换器,而且可以监视、分析和控制在总体hvac系统的环境和性能内它们的相互作用、互操作性和相互依赖性。因此,可以监视、分析和改进多区域hvac系统的操作和性能,而不必完全依赖于建筑控制系统或建筑自动化系统。
7.在一个实施例中,该方法进一步包括一个或多个处理器经由通信网络从hvac系统的多个设备接收流体运输系统的操作变量的多个设定点值;为每个设定点值确定相应设定点值的时间进程;从设定点值的时间进程检测设定点值的时间进程之间的相互依赖性;以及使用设定点值的时间进程之间的相互依赖性以用于将设定点值及其相关联的设备分组成不同的集合。
8.在一个实施例中,流体运输系统的操作变量包括流体温度;并且该方法进一步包括一个或多个处理器通过确定流体温度的时间进程的相关性来检测相互依赖性,并且将操作变量及其相关联的设备分组成集合,所述集合与流体运输系统中的不同一个相关并且包括由流体运输系统中的不同一个连接到公共热能源的操作变量及其相关联的设备。
9.在一个实施例中,该方法进一步包括一个或多个处理器通过检测分组成与不同流体运输系统和区域相关的集合的操作变量的时间进程之间的相互依赖性,在hvac系统中标识热能交换设备,该热能交换设备将流体运输系统中的第一个的区域和流体运输系统中的
第二个的区域耦合为初级和次级流体回路。
10.在一个实施例中,该方法进一步包括一个或多个处理器通过检测以下操作变量对的时间进程之间的相互依赖性来标识热能交换设备,所述操作变量对:第一流体运输系统中的流体流量和第二流体运输系统中的流体温度、第一流体运输系统中的阀的阀位置和第二流体运输系统中的流体温度、第一流体运输系统中的流体供应温度和第二流体运输系统中的流体温度、第一流体运输系统中的流体流量和第二流体运输系统中的阀的阀位置、第一流体运输系统中的阀的阀位置和第二流体运输系统中的阀的阀位置、第一流体运输系统中的流体供应温度和第二流体运输系统中的阀的阀位置、和/或第二流体运输系统中的阀的阀位置和第一流体运输系统中的流体返回温度。
11.在一个实施例中,该方法进一步包括一个或多个处理器将操作变量及其相关联的设备分组成集合,所述集合与流体运输系统之一的不同区域相关并且包括与流体运输系统之一的不同区域相关的操作变量及其相关联的设备。
12.在一个实施例中,该方法进一步包括一个或多个处理器将来自与流体运输系统中的特定一个的不同区域相关的集合的操作变量及其相关联的设备划分成与平行区域相关的子集,所述平行区域压力独立于流体运输系统中的特定一个的其它区域。
13.在一个实施例中,该方法进一步包括一个或多个处理器将操作变量及其相关联的设备分组成集合,所述集合每个与容纳hvac系统的建筑的特定区域相关,并且包括与建筑的特定区域相关的操作变量及其相关联的设备,所述建筑的特定区域由相应的热负载表征。
14.在一个实施例中,该方法进一步包括一个或多个处理器将操作变量及其相关联的设备分组成集合,所述集合每个与容纳hvac系统的建筑的特定区域相关,并且包括与建筑的特定区域相关的操作变量及其相关联的设备,所述建筑的特定区域面向由特定基本方向上的相应太阳照射表征的特定基本方向之一。
15.在一个实施例中,流体运输系统的操作变量包括:流体的温度、流体的流速率和流体的压力;并且该方法进一步包括一个或多个处理器通过确定流体的温度、流体的流速率和/或流体的压力中的至少一个的时间进程的相关性来检测相互依赖性。操作变量的时间进程的相关性包括正相关和负相关。
16.在一个实施例中,该方法进一步包括一个或多个处理器通过从操作变量的时间进程确定操作变量的改变的同步性来检测相互依赖性。
17.在一个实施例中,该方法进一步包括一个或多个处理器时移操作变量的时间进程,并且通过使用操作变量的时移时间进程确定操作变量的改变的同步性和/或操作变量的相关性来检测相互依赖性。
18.在一个实施例中,该方法进一步包括一个或多个处理器从操作变量的时间进程检测操作变量的改变之间的时间延迟,并且使用该时间延迟来确定流体运输系统中hvac系统的设备的相对位置。
19.在一个实施例中,该方法进一步包括一个或多个处理器将操作变量及其相关联的设备分组成与流体运输系统中的特定一个的平行区域相关的集合,每个集合包括与平行区域之一相关的操作变量及其相关联的设备;以及根据负载平衡方案、调峰方案、用于供应不足场景的经调整的流量分发方案和/或流体运输驱动器优化方案,使用流体运输系统中的
特定一个的平行区域的操作变量来控制平行区域的设备。
20.在一个实施例中,该方法进一步包括一个或多个处理器将操作变量及其相关联的设备分组成集合,所述集合每个与流体运输系统中的特定一个相关,并且包括与流体运输系统中的特定一个相关的操作变量及其相关联的设备;检测与流体运输系统中的特定一个相关的操作变量的振荡;以及在检测到振荡时,为与流体运输系统中的特定一个相关的设备设置更改的定时参数。
21.在一个实施例中,该方法进一步包括一个或多个处理器经由通信网络从hvac系统的多个传感器设备接收多个房间温度值;为每个传感器设备确定房间温度值的时间进程;检测房间温度值的时间进程和操作变量的时间进程之间的相互依赖性;使用房间温度值的时间进程和操作变量的时间进程之间的相互依赖性以用于将传感器设备及其房间温度值分配给不同的集合;以及使用与hvac系统的特定部分相关的房间温度值来控制hvac系统的特定部分的设备。
22.在一个实施例中,该方法进一步包括一个或多个处理器通过经由通信网络向hvac系统的多个设备传输流体运输系统的操作变量的多个设定点值,并响应于传输设定点值从hvac系统的多个设备接收流体运输系统的多个操作变量,来执行系统测量阶段。
23.在一个实施例中,该方法进一步包括一个或多个处理器使用hvac系统的特定部分的操作变量来确定hvac系统时间表,并使用hvac系统时间表来生成指示检测到与hvac系统时间表的偏差的警报消息,和/或指示为hvac系统的更能量高效操作的hvac系统时间表的建议改变的帮助消息。
24.在一个实施例中,该方法进一步包括一个或多个处理器使用集合来生成hvac系统的配置模型,该配置模型被构造成具有一个或多个平行区域以及与这些区域相关的hvac系统的设备的一个或多个流体运输系统;并且使用hvac系统的配置模型以用于执行控制hvac系统的设备和/或生成关于hvac系统的一个或多个设备的故障检测消息。
25.除了监视和控制多区域hvac系统的计算机实现的方法之外,本发明还涉及一种用于监视和控制hvac系统的计算机系统,该计算机系统包括一个或多个流体运输系统,在每个流体运输系统中具有多个平行区域。该计算机系统包括一个或多个处理器,所述一个或多个处理器被配置为执行监视和控制多区域hvac系统的计算机实现的方法的步骤。具体地,该计算机系统包括一个或多个处理器,所述一个或多个处理器被配置为执行以下步骤:经由通信网络从hvac系统的多个设备接收流体运输系统的多个操作变量;为每个操作变量确定相应操作变量的时间进程;从操作变量的时间进程检测操作变量的时间进程之间的相互依赖性;取决于相互依赖性,将操作变量及其相关联的设备分组成不同的集合,每个集合与hvac系统的不同部分相关,并且包括与hvac系统的不同部分相关的操作变量及其相关联的设备;以及通过以下操作使用集合来控制hvac系统,所述操作:使用与hvac系统的特定部分相关的操作变量来控制hvac系统的特定部分的设备,和/或使用与hvac系统的特定部分的一个或多个设备相关联的操作变量来生成关于hvac系统的特定部分的一个或多个设备的故障检测消息。
26.除了用于监视和控制多区域hvac系统的计算机实现的方法和计算机系统之外,本发明还涉及一种包括其上存储有计算机代码的非暂时性计算机可读介质的计算机程序产品,所述计算机代码被配置为控制用于监视和控制hvac系统的计算机系统的一个或多个处
理器,所述hvac系统包括一个或多个流体运输系统,在每个流体运输系统中具有多个平行区域,使得所述一个或多个处理器执行监视和控制多区域hvac系统的计算机实现的方法的步骤。具体地,计算机代码被配置为控制计算机系统的一个或多个处理器,使得一个或多个处理器执行以下步骤:经由通信网络从hvac系统的多个设备接收流体运输系统的多个操作变量;为每个操作变量确定相应操作变量的时间进程;从操作变量的时间进程检测操作变量的时间进程之间的相互依赖性;取决于相互依赖性,将操作变量及其相关联的设备分组成不同的集合,每个集合与hvac系统的不同部分相关,并且包括与hvac系统的不同部分相关的操作变量及其相关联的设备;以及通过以下操作使用集合来控制hvac系统,所述操作:使用与hvac系统的特定部分相关的操作变量来控制hvac系统的特定部分的设备,和/或使用与hvac系统的特定部分的一个或多个设备相关联的操作变量来生成关于hvac系统的特定部分的一个或多个设备的故障检测消息。
附图说明
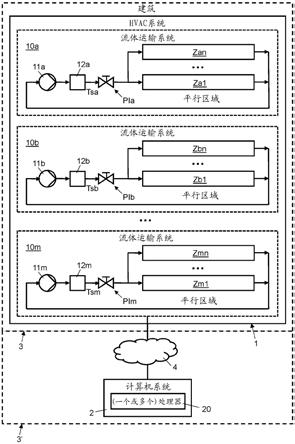
27.将参考附图通过示例的方式更详细地解释本发明,其中:图1示出了示意性图示hvac系统以及用于监视和控制hvac系统的计算机系统的框图,该hvac系统具有若干流体运输系统,每个流体运输系统具有若干平行区域。
28.图2示出了示意性图示具有两个平行区域的两个平行组的hvac系统的流体运输系统的框图。
29.图3示出了示意性图示具有三个平行区域的hvac系统的流体运输系统的框图。
30.图4示出了示意性图示用于hvac系统的初级回路的流体运输系统的框图,该hvac系统具有经由热能交换器耦合到hvac系统的次级回路的流体运输系统的两个平行区域。
31.图5示出了示意性图示具有两个平行区域的hvac系统的流体运输系统的框图,由此区域之一包括作为热能交换器的热活动建筑。
32.图6示出了示意性图示用于监视和控制hvac系统的示例性步骤序列的流程图。
33.图7a
‑
7e示出了示意性图示hvac系统的流体运输系统的操作变量(和/或设定点值)的(相关的)时间进程的示例的若干图表。
34.图8a
‑
8c示出了示意性图示hvac系统的流体运输系统的操作变量(和/或设定点值)的(相关的)时间进程的示例的若干图表。
35.图9示出了示意性图示用于将操作变量及其相关联的设备分组成与hvac系统的不同部分相关的不同集合的示例性步骤序列的流程图。
具体实施方式
36.在图1中,参考标记1指代布置在建筑3、3'或若干建筑中的hvac系统。如图1中所图示的,hvac系统1包括若干流体运输系统10a、10b、10m。图2、3、4和5中图示了流体运输系统10、10c的进一步示例,其可以是图1中图示的hvac系统1的一部分,或者在另一个hvac系统中。流体运输系统10、10a、10b、10c、10m包括具有流体运输管线的回路,例如用于诸如水和/或乙二醇之类的液态流体的管道,或者用于诸如空气之类的气态流体的导管。在图1
‑
5中图示的示例中,参考标记10、10a、10b、10m指代包括用于运输液态流体(例如水)的管道的流体运输系统。在图4的示例中,参考标记10c指代包括用于运输气态流体(例如空气)的导管的
流体运输系统。
37.如图1
‑
5中所图示的,运输系统10、10a、10b、10c、10m包括用于加热或冷却流体的热能源12、12a、12b、12m,例如加热器或冷却器。每个流体运输系统10、10a、10b、10c、10m包括流体运输驱动器11、11a、11b、11m,例如用于驱动液态流体的泵或用于移动气态流体的通风机。
38.图1
‑
5中所图示的流体运输系统10、10a、10b、10c、10m包括多个平行区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn。
39.为了确保压力独立流动,流体运输系统10、10a、10b、10m可以包括压力独立阀pi、pia、pia、pim、pi1、pi2,如图1
‑
5中所图示的。
40.到个体区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn的流量分别由阀v1、v2、v3、v4、v5、v6、v7、v8、v9、v10、v11或阻尼器d28、d29调节。如前所述,一般而言,术语“阀”在本文中用于指代用于液态和气态流体的流量控制设备,并且因此,除非另有指示,否则也意味着包括“阻尼器”。阀v1、v2、v3、v4、v5、v6、v7、v8、v9、v10、v11、d28、d29由具有机械耦合到阀的电机的致动器驱动。
41.如图1中所图示的,hvac系统1经由通信网络4连接到计算机系统2。计算机系统2包括一个或多个操作计算机,每个操作计算机具有一个或多个处理器20。如图1中示意性图示的,计算机系统2被布置在与hvac系统1相同的(一个或多个)建筑3'内,或者在容纳hvac系统1的(一个或多个)建筑3之外并且远离所述(一个或多个)建筑3。在一个实施例中,计算机系统2是基于云的计算机系统。取决于实施例,通信网络4包括局域网(lan)、无线局域网(wlan)、诸如gsm(全球移动通信系统)、utms(通用移动电话系统)或5g网络之类的移动无线电通信网络、和/或互联网。
42.在图2中图示的示例性流体运输网络10中,平行区域z1和z2通过压力独立阀pi1的方式作为组g1与包括平行区域z3和z4的组g2分开。如图2中所图示的,每个平行区域z1、z2、z3、z4包括热能交换器e1、e2、e3、e4,例如散热器,以及调节阀v1、v2、v3、v4,用于调节和调整通过相应热能交换器e1、e2、e3、e4的流量φ1、φ2、φ3、φ4。用于测量流速率φ1、φ2、φ3、φ4(以及可选地流速度)的流量传感器被布置在区域z1、z2、z3、z4的流体运输管线中,例如在阀v1、v2、v3、v4的下游或上游。温度传感器被布置在热能交换器e1、e2、e3、e4的下游和上游,用于测量流体的入口温度t1、t2、t3、t4和出口温度t1'、t2'、t3'、t4'。
43.在图3中图示的示例性流体运输网络10中,平行区域z5、z6、z7包括热能交换器e5、e6、e7和调节阀v5、v6、v7,用于调节和调整通过热能交换器e5、e6、e7的流量φ5、φ6、φ7。用于测量流速率φ5、φ6、φ7(以及可选地流速度)的流量传感器被布置在区域z5、z6、z7的流体运输管线中。温度传感器被布置在热能交换器e5、e6、e7的下游和上游,用于测量流体的入口温度t5、t6、t7和出口温度t5'、t6'、t7'。如图3中示意性图示的,区域z6和z7被布置在建筑3、3'的暴露于太阳的区域a2中,例如在面向基本方向南方的区域a2中,而区域z5被布置在建筑3、3'的不暴露于或至少显著较少暴露于太阳的区域a1中,例如在面向基本方向北方的区域a1中。
44.在图4中图示的示例性流体运输网络10中,平行区域z8、z9包括热能交换器e8、e9和调节阀v8、v9,用于调节和调整通过热能交换器e8、e9的流量φ8、φ9。用于测量流速率φ8、φ9(以及可选地流速度)的流量传感器被布置在区域z8、z9的流体运输管线中。温度传感
器被布置在热能交换器e8、e9的下游和上游,用于测量流体的入口(供应)温度t8、t9和出口(返回)温度t8'、t9'。如图4的示例中进一步图示的,流体运输网络10经由热能交换器e8、e9热耦合到流体运输网络10c。更具体地,在图4的示例中,热能交换器e8、e9(例如热交换器)将在构成热能交换器e8、e9的初级侧或回路的区域z8、z9的流体运输管线中运输的流体(例如水和/或乙二醇)与在构成热能交换器e8、e9的次级侧或回路的区域z28、z29的流体运输管线中运输的流体(例如空气)热耦合。温度传感器ts28、ts29、ts28'、ts29'被布置在区域z28、z29的流体运输管线中,用于测量次级侧的流体的入口(供应)温度t28、t29和出口(返回)温度t28'、t29'。用于测量流速率φ28、φ29(以及可选地流速度)的流量传感器被布置在区域z28、z29的流体运输管线中。
45.在图5中图示的示例性流体运输网络10中,平行区域z10、z11包括热能交换器e10、e11和调节阀v10、v11,用于调节和调整通过热能交换器e10、e11的流量φ10、φ11。用于测量流速率φ10、φ11(以及可选地流速度)的流量传感器被布置在区域z10、z11的流体运输管线中。温度传感器被布置在热能交换器e10、e11的下游和上游,用于测量流体的入口温度t10、t11和出口或返回温度t10'、t11'。如图5中所图示的,平行区域z10、z11包括不同类型的热能交换器e10、e11;具体地,热能交换器e11(例如热活动建筑(tab))比热能交换器e10加热得显著更慢。该事实由描绘进入区域z10、z11的流体的增加的供应温度tsup(t10、t11)的曲线图来图示,由此热能交换器e10的出口或返回温度t10'示出对应的增加,而相比之下,热能交换器e11的出口或返回温度t11'示出时间延迟和阻尼的增加。
46.在以下段落中,参考图6描述了分别由计算机系统2或其处理器20执行的用于监视和控制hvac系统1的可能的步骤序列。
47.在可选步骤s0中,计算机系统2或其处理器20分别通过经由通信网络4向hvac系统1的设备传输设定点值来发起监视和测量阶段m。更具体地,设定点值被发送到hvac系统1的阀pi、pia、pib、pim、v1、v2、v3、v4、v5、v6、v7、v8、v9、v10、v11、流体运输驱动器11、11a、11b、11m(泵和/或通风机)和/或热能源12、12a、12b、12m(加热器和/或冷却器)。因此,设定点值包括阀设置,诸如目标流速率、阀位置、阀开度或致动器位置,驱动器设置,诸如泵送功率、泵送速度或通风机速度,以及能源值,诸如目标温度、加热因子或冷却因子。
48.在步骤s1中,计算机系统2或其处理器20分别经由通信网络4从hvac系统1的设备接收操作变量。在步骤s0中传输设定点值的实施例或配置中,响应于传输的设定点值而在步骤s1中接收操作变量。否则,在步骤s1中定期接收操作变量,例如分别由hvac系统的设备以推送模式报告或者由计算机系统2或其处理器20以拉取模式请求。更具体地,从流量传感器、温度传感器ts28、ts29、压力传感器和/或空气质量传感器接收操作变量。传感器被布置和安装在hvac系统1中作为单独的个体传感器,或者更典型地,与另一个hvac设备相关联或连接,所述另一个hvac设备诸如致动器、阀、阻尼器、泵、通风机、热能源,例如冷却器或加热器、热能交换器,例如散热器或热交换器等。hvac系统1的设备由设备标识符定义,所述设备标识符例如唯一的序列号和/或通信地址,诸如ip地址(互联网协议),以及可选地设备类型,例如传感器类型、致动器类型、阀类型、阻尼器类型、泵类型、通风机类型、热能源类型,例如冷却器类型或加热器类型、热能交换器类型,例如散热器类型、热交换器类型等。操作值包括流体的流速率φ1、φ2、φ3、φ4、φ5、φ6、φ7、φ8、φ9、φ10、φ11、φ28、φ29(以及可选地流速度)、流体的入口(或供应)温度ts、tsa、tsb、tsm、t1、t2、t3、t4、t5、t6、t7、t8、
t9、t10、t11、流体的出口(或返回)温度t1'、t2'、t3'、t4'、t5'、t6'、t7'、t8'、t9'、t10'、t11'、流体的压差δ1、δ2、δ3、δ4、δ5、δ6、δ7、δ8、δ9、δ10、δ11、空气温度值t28、t29、房间温度值和/或其它空气质量值,诸如湿度、一氧化碳水平、二氧化碳水平、其它voc水平等。计算机系统2或其处理器20分别存储接收到的分配给hvac系统1的相应设备的操作变量,该设备报告操作变量(例如与分别由相应设备或由计算机系统2或其处理器20提供的时间戳一起)。
49.在可选步骤s2中,例如如果省略可选步骤s0,则计算机系统2或其处理器20分别经由通信网络4从hvac系统1的设备接收设定点值。在步骤s2中,设定点值被定期接收,例如分别由hvac系统的设备以推送模式报告或者由计算机系统2或其处理器20以拉取模式请求。更具体地,设定点值从hvac系统1的阀pi、pia、pib、pim、v1、v2、v3、v4、v5、v6、v7、v8、v9、v10、v11、流体运输驱动器11、11a、11b、11m(泵和/或通风机)和/或能源12、12a、12b、12m(加热器和/或冷却器)接收。计算机系统2或其处理器20分别例如分别与由相应设备或由计算机系统2或其处理器20提供的时间戳一起存储分配给hvac系统1的相应设备的传输或接收的设定点。
50.在步骤s3中,如果适用,计算机系统2或其处理器20分别确定接收到的操作变量和设定点值的时间进程。更具体地,如果适用,使用与数据值相关联并一起存储的时间戳,从由hvac系统1的相应设备在监视和测量阶段m的某个时间段内针对特定操作变量或设定点值报告的多个记录的数据值确定特定操作变量或设定点值的时间进程。图7a
‑
7e和8a
‑
8c图示了操作变量和/或设定点值的时间进程tc7a、tc7b、tc7c、tc7d、tc7e、tc8a、tc8b、tc8c的示例,它们由参考标记tc共同引用。
51.在步骤s4中,计算机系统2或其处理器20分别确定hvac系统1的操作变量的时间进程tc和设定点值(如果适用的话)之间的相互依赖性。
52.时间进程tc之间的相互依赖性分别包括操作变量和/或设定点值的时间进程tc的(正和负、有阻尼和无阻尼)相关性,分别包括操作变量和/或设定点值的改变在时间进程tc中的同步性,以及操作变量的时移时间进程中的操作变量的改变和(正和负)相关性的同步性(时间延迟相关性)。
53.图7b示出了与图7a中所图示的操作变量或设定点值的时间进程tc7a正相关的操作变量或设定点值的时间进程tc7b的示例。与时间进程tc7a相比,时间进程tc7b具有相应操作变量或设定点值的衰减(阻尼)值。
54.图7c示出了与图7a中图示的操作变量或设定点值的时间进程tc7a负相关的操作变量或设定点值的时间进程tc7c的示例。
55.图7a、7b和7c中图示的时间进程tc7a、tc7b和tc7c进一步示出了相应操作变量或设定点值的改变的同步性;从点t0出发,时间进程tc7a、tc7b和tc7c在时间点t1、t2和t3具有同步的改变。具体地,在t0和t1之间操作变量或设定点值的连续增加(或分别减少)在t1处被改变为操作变量或设定点值的恒定值,并且操作变量或设定点值的恒定值在t2处被改变为操作变量或设定点值的连续减少(或分别增加),随后在t3处被改变为操作变量或设定点值的另一恒定水平。在一个实施例中,基于相应操作变量和设定点值的时间进程tc的一阶导数的(同步)时间进程,检测操作变量和设定点值的同步改变。
56.图7d和7e示出了时间进程tc7d、tc7e的示例,其分别示出了与图7a、7b和7c所示出
的时间进程tc7a、tc7b、tc7c具有时间延迟d1或d2的改变的(时间延迟的)正相关性和同步性。换句话说,当时移了时间延迟d1或d2时,时间进程tc7d、tc7e的时间点t0
′
、t1
′
、t2
′
、t3
′
和t0
″
、t1
″
、t2
″
、t3
″
分别对应于时间进程tc7a、tc7b、tc7c的时间点t0、t1、t2、t3。因此,时间进程tc7d、tc7e示出了当时移了相应的时间延迟d1、d2时,相应的操作变量相对于操作变量的时间进程tc7a、tc7b、tc7c的改变的同步性以及正或负相关性。在一个实施例中,通过如由图7d、7e中的时移箭头ts示意性指示的那样,例如通过增量时移值,将时间进程tc分别时移到彼此,并且检查时移的时间进程tc7d、tc7e关于相应的其它时间进程tc7a、tc7b、tc7c的同步性和/或(负和正)相关性,来检测操作变量的时间进程tc的同步改变和相关性。由时移或延迟相关性和同步改变指示的相互依赖性对于流体温度(例如水温度)是典型的,但是对于流体流量或流体压力不是预期的。延迟相关性的另一个示例在图5中示出,其中热能交换器e11的出口或返回温度t11'的时间进程与进入区域z10的流体的供应温度tsup(t10,t11)的时间进程示出时间延迟(时间延迟d3)的正(但有阻尼)相关性,如上面结合图5所描述的。
57.对于涉及操作变量的时移时间进程的任何检测到的相互依赖性,计算机系统2或其处理器20分别将针对其检测到相关性和同步性的时移值存储为时间延迟d1、d2、d3值。流体供应温度(例如水供应温度)的已知时间延迟d1、d2使得可能例如依据到热能源的相对距离来确定流体运输系统中hvac设备的次序和位置。本领域的技术人员将理解,取决于场景和配置,确定系统的流体运输系统中的hvac设备的次序和位置可能更复杂,并且需要组合诸如温度、流量和压力之类的信息,因为例如,当控制阀几乎关闭时,温度“移动”缓慢。流体返回温度(例如水返回温度)的已知时间延迟d3使得可能例如确定流体运输系统中热能交换器的特性,并区分不同的应用,例如可变空气体积(vav)应用与热活动建筑(tab)应用,例如如图5中所图示的。
58.在步骤s5中,计算机系统2或其处理器20分别使用检测到的时间进程tc之间的相互依赖性来将hvac系统1的操作变量和设定点值(如果适用的话)及其相关联的设备分组成不同的集合。集合中的每个集合与hvac系统1的不同部分相关,并且包括操作变量和设定点值(如果适用的话)及其与hvac系统1的相应部分相关的相关联的设备。如下面将更详细解释的,hvac系统1的部分包括不同的流体运输系统10、10a、10b、10c、10m、不同的平行区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn以及容纳hvac系统1的建筑3、3'的不同区域a1、a2,并且可以包括具有平行区域z1、z2、z3、z4的不同组g1、g2的子集。
59.如图9中所图示的,为了将操作变量和设定点值(如果适用的话)及其相关联的hvac设备分组成与hvac系统1的不同部分相关的不同集合,在步骤s5的子步骤s51中,计算机系统2或其处理器20分别使用检测到的流体温度的时间进程之间的相互依赖性以用于将操作变量及其相关联的hvac设备分组成与不同的流体运输系统10、10a、10b、10c、10m相关的集合,将相应的设备连接到公共热能源12、12a、12b、12m。来自热能源12、12a、12b、12m的流体的供应温度ts、tsa、tsb、tsm与流体的入口(供应)温度t1、t2、t3、t4、t5、t6、t7、t8、t9、t10、t11或出口(返回)温度t1'、t2'、t3'、t4'、t5'、t6'、t7'、t8'、t9'、t10'、t11'之间的检测到的同步或时间延迟的相关性指示相关联的hvac设备连接到相同的热能源12、12a、12b、12m。这里应该指出的是,与区域相关联的经标识的hvac设备集合具有传递属性。例如,如果
在图3的示例中,区域z5和z6具有相同的热能源12,并且区域z6和z7具有相同的热能源12,则那么区域z5和z7必须具有相同的热能源12。
60.在子步骤s52中,计算机系统2或其处理器20分别确定受监视的hvac系统1是否只包括一个或多个流体运输系统10、10a、10b、10c、10m。如果检测到多个流体运输系统10、10a、10b、10c、10m,则处理在子步骤s53中继续;否则,处理在子步骤s54中继续。
61.在子步骤s53中,计算机系统2或其处理器20分别使用检测到的与不同流体运输系统10、10c的区域z8、z9、z28、z29相关的操作变量的时间进程之间的相互依赖性来检测和标识热能交换器e8、e9,所述热能交换器e8、e9将检测到的流体运输系统10之一的区域z8、z9和检测到的流体运输系统10c的另一个的区域z28、z29耦合为初级和次级流体回路。取决于实施例和/或配置,计算机系统2或其处理器20分别通过检测以下操作变量对的时间进程之间的相互依赖性来标识热能交换器e8、e9,所述操作变量对:
‑
在被标识为初级回路的检测到的流体运输系统10之一中的流体(例如水和/或乙二醇)的流速率φ8、φ9,以及在被标识为次级回路的检测到的流体运输系统10c中的另一个中的流体温度t28、t29(例如空气温度);
‑
被标识为初级回路的检测到的流体运输系统10之一中的阀v8、v9的阀位置,以及被标识为次级回路的检测到的流体运输系统10c中的另一个中的流体温度t28、t29(例如空气温度);
‑
在被标识为初级回路的检测到的流体运输系统10之一中的流体(例如水和/或乙二醇)供应温度t8、t9,以及在被标识为次级回路的检测到的流体运输系统10c中的另一个中的流体温度t28、t29(例如空气温度);
‑
在被标识为初级回路的检测到的流体运输系统10之一中的流体(例如水和/或乙二醇)的流速率φ8、φ9,以及在被标识为次级回路的检测到的流体运输系统10c中的另一中的阀d28、d29(例如空气阻尼器)的阀位置;
‑
在被标识为初级回路的检测到的流体运输系统10之一中的阀v8、v9的阀位置,以及在被标识为次级回路的检测到的流体运输系统10c中的另一个中的阀d28、d29的阀位置;
‑
在被标识为初级回路的检测到的流体运输系统10之一中的流体(例如水和/或乙二醇)供应温度t8、t9,以及在被标识为次级回路的检测到的流体运输系统10c中的另一个中的阀d28、d29(例如空气阻尼器)的阀位置;和/或
‑
在被标识为次级回路的检测到的流体运输系统10c之一中的阀d28、d29(例如空气阻尼器)的阀位置,以及在被标识为初级回路的检测到的流体运输系统10中的另一个中的流体(例如水和/或乙二醇的)返回温度t8'、t9'。
62.在子步骤s54中,计算机系统2或其处理器20分别使用在与一个检测到的流体运输系统10、10a、10b、10c、10m相关的操作变量的时间进程之间检测到的相互依赖性,用于将操作变量、设定点值及其相关联的hvac设备分组成与相应流体运输系统10、10a、10b、10c、10m的不同平行区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn相关的集合。由于与检测到的流体运输系统10、10a、10b、10c、10m中的特定一个相关的操作变量的时间进程在来自热能源12、12a、12b、12m的流体的供应温度ts、tsa、tsb、tsm与入口温度t1、t2、t3、t4、t5、t6、t7、t8、t9、t10、t11或出口(返回)温度t1'、t2'、t3'、t4'、t5'、t6'、t7'、t8'、t9'之间具有检测到的同步或时间延迟的相关性,如子步骤s51中所
确定的,将hvac设备和相关联的操作变量进一步分组成不同的集合基于流速率、流体压力和流体温度的(强)相关性,所述集合每个均与一个平行区域相关。
63.在子步骤s55中,计算机系统2或其处理器20分别使用在与检测到的流体运输系统10之一的平行区域z1、z2、z3、z4相关的操作变量的时间进程之间检测到的相互依赖性,用于将操作变量、设定点值及其相关联的hvac设备分组成与平行区域z1、z2、z3、z4的组相关的子集g1、g2,所述组压力独立于彼此,例如平行区域z1、z2、z3、z4的组g1、g2通过压力独立设备pi1、pi2(例如压力独立阀或与压力独立流体分发器,诸如大型管道系统)彼此分开,或者它们由单独的和/或附加的泵和/或通风机驱动。虽然子集g1或组中的第一个的平行区域z1、z2的操作变量示出正或负的相关性,但是另一子集g2或组的平行区域z3、z4的操作变量基本上保持独立,并且不受子集g1或组中的所述第一个的平行区域z1、z2的操作变量的改变的影响。
64.在子步骤s56中,计算机系统2或其处理器20分别使用在与平行区域z5、z6、z7相关的操作变量和设定点值的时间进程之间检测到的相互依赖性,用于将操作变量、设定点值及其相关联的hvac设备分组成与容纳hvac系统1的建筑3、3'的特定区域a1、a2相关的集合。更具体地,建筑3、3'的特定区域a1、a2由相应的热负载表征。例如,建筑3、3'的特定区域a1、a2由它们关于具有相应的太阳照射的特定基本方向(例如南方或北方)的定向表征。例如,在冷却应用中,与第一区域a2相关的平行区域z6、z7的操作变量和设定点值相对于高热负载示出正相关,所述第一区域a2朝向具有高度的太阳照射的南方定向,所述高热负载例如由上限热阈值定义并由相应的操作变量和设定点值中的一个或多个表达,而与第二区域a1相关的平行区域z5的操作变量和设定点值示出相对于相对低的热负载的正相关,所述第二区域a1朝向具有相对低的太阳照射程度的北方定向,所述相对低的热负载例如由较低的热阈值定义并由相应的操作变量和设定点值中的一个或多个表达。
65.在一个实施例中,计算机系统2或其处理器20分别使用在与平行区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn相关的房间温度以及其它操作变量和设定点值的时间进程之间检测到的相互依赖性,用于将操作变量、设定点值及其相关联的hvac设备分组成与容纳hvac系统1的建筑3、3'的特定区域或房间相关的集合。
66.本领域技术人员将理解,分组(即集合和子集)构成hvac系统1的配置或构造模型。如由计算机系统2或其处理器20分别生成并由集合和子集定义的hvac系统1的配置或构造模型被构造成一个或多个流体运输系统10、10a、10b、10c、10m,其包括一个或多个平行区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn以及平行区域z1、z2、z3、z4的压力独立组g1、g2的子集。与特定区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn相关的集合和子集进一步指示与相应区域相关联并布置在相应区域中的hvac系统1的设备,并且包括与该区域的hvac设备相关并由该区域的hvac设备测量的操作变量和设定点值的时间进程。如由集合和子集定义的hvac系统1的配置或构造模型进一步包括平行区域z1、z2、z3、z4、z5、z6、z7、z8、z9、z10、z11、z28、z29、za1
…
zan、zb1
…
zbn、zm1
…
zmn及其hvac设备的(基于延迟的)位置信息,定义了设备在流体运输系统10、10a、10b、10c、10m中以及相对于热能源12、12a、12b、12m的彼此的相对位置。hvac系统1的配置或构造模型进一步指示流体运输系统10、10c,其通过布置在相应
流体运输系统10、10c的特定区域z8、z9、z28、z29中的经标识的热能交换设备e8、e9热耦合。hvac系统1的配置或构造模型进一步包括关于容纳hvac系统1的(一个或多个)建筑3、3'中的区域位置的位置信息,包括具有不同太阳照射的区域a1、a2和建筑3、3'的特定房间。
67.在步骤s6中,计算机系统2或其处理器20分别使用hvac系统1的配置或构造模型(即具有hvac系统1的操作变量和设定点值及其相关联的设备的分组的集合和子集),用于监视和/或控制hvac系统1的操作和性能。具体地,计算机系统2或其处理器20分别使用hvac系统1的所生成的配置或构造模型以及相关的操作变量和设定点值,用于监视和分析hvac系统1的操作和性能,并且取决于对hvac系统1的操作和性能的分析,生成关于hvac系统1的一个或多个设备的故障检测消息和/或控制hvac系统1的一个或多个设备以用于hvac系统1的改进或优化的性能。故障检测消息被传输到与hvac系统1相关联的一个或多个通信终端。
68.例如,如图8a
‑
8c中所图示的,(图3中所示出的)平行区域z5、z6、z7的流速率的时间进程tc8a、tc8b、tc8c具有相互依赖性,其中(由时间进程tc8b、tc8c表示的)区域z5和z6的流速率φ5、φ6与(由时间进程tc8a表示的)区域z8的流速率φ7示出负相关。计算机系统2或其处理器20分别对与区域z5、z6、z7的阀v5、v6、v7相关的设定点值的进一步分析表明,在时间进程tc8a中流速率φ7的峰值pk基于对区域z7的高需求,而区域z5和z6的流速率φ5、φ6的下降或减小r1、r2不是区域z5、z6的阀v5、v6的对应较低设定点值的结果,而是区域z7的阀v7(阀v7或区域z7正在从区域z5和z6“窃取流量”)的相对较高的需求或设定点值的结果。在重复检测到这样的场景时,计算机系统2或其处理器20分别生成相应的警报消息和/或实现和执行调峰方案,由此在时间进程tc8a中流速率φ7的pk减小,使得可以在区域z5和z6中防止流速率φ5、φ6的下降或减小r1、r2。根据调峰方案的结果,计算机系统2或其处理器20分别向hvac系统1(例如向区域z5、z6、z7的阀v5、v6、v7或相应的致动器)传输经适配的设定点值。
69.在另一个示例中,计算机系统2或其处理器20分别检测与一个或多个流体运输系统10a、10b、10c、10m、10相关的一个或多个操作变量的振荡。一旦检测到振荡,计算机系统2或其处理器20分别为与相应的一个或多个流体运输系统10a、10b、10c、10m、10相关的设备设置(定义和传输)经更改的定时参数,以便获得hvac系统1的更稳定的操作和性能。
70.在另一个示例中,计算机系统2或其处理器20分别使用hvac系统1的所生成的配置或构造模型以及相关操作变量和设定点值的时间进程,该时间进程在几天(例如一周或一个月或更长)的延长时间段上延伸,用于确定hvac系统时间表,该时间表指示hvac系统1的重复和循环的操作模式。基于hvac系统时间表和对hvac系统1的持续监视,计算机系统2或其处理器20分别生成指示检测到的与hvac系统时间表的偏差(例如,阻塞的热交换器或阀)的警报消息和/或指示hvac系统时间表的建议改变的帮助消息,用于hvac系统1更能量高效的操作,例如以根据观察到的锅炉容量(根据观察到的流体和能量的累积流量)和时间表来调整负载,使得峰值需求不与锅炉的再充电冲突。警报消息和/或帮助消息分别被传输到与hvac系统1相关联的一个或多个通信终端。在一个实施例中,基于hvac系统时间表和对hvac系统1的持续监视,计算机系统2或其处理器20分别确定(选择和/或生成)hvac系统的时间表、控制程序和/或控制参数的改变,用于hvac系统1更能量高效的操作,并经由通信网络4将所述改变传输到hvac系统1及其组件。
71.在进一步的示例和实施例中,计算机系统2或其处理器20分别使用hvac系统1的所
生成的配置或构造模型以及相关操作变量和设定点值的时间进程:
‑ꢀ
检测不平衡负载场景,例如对于相邻房间中的(目标和实现的)对应房间温度,与这些房间相关的区域的热负载是不平衡的,使得房间被相邻房间加热,并且实现和执行负载平衡方案,用于hvac系统1的更平衡的操作;
‑ꢀ
检测供应不足场景,其中一个区域以另一个区域为代价消耗流速率(参见上面的相关示例),并且实现和执行经调整的流量分发方案,用于hvac系统1的更平衡的操作;
‑ꢀ
实现和执行流体运输驱动器11、11a、11b、11m优化方案,用于降低所需的泵送功率,例如,通过最大化hvac系统1的阀pi、pia、pib、pim、v1、v2、v3、v4、v5、v6、v7、v8、v9、v10、v11的打开水平,同时保持所需的流速率;和/或
‑ꢀ
通过确定建筑3、3'的房间加热和/或冷却的持续时间来改进和优化热能源12、12a、12b、12m的时间表,并且相应地安排热能源12、12a、12b、12m产生热能,用于hvac系统1更能量高效的操作。
72.根据相应优化方案的结果,计算机系统2或其处理器20分别将经适配的设定点值传输到hvac系统1,例如传输到hvac系统1的相应设备。
73.应当注意,在描述中,步骤的顺序已经以特定次序呈现,然而,本领域技术人员将理解,在不脱离本发明的范围的情况下,可以更改至少一些步骤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。