用于估计材料片形状的方法及设备
1.此申请案依据美国专利法第119条请求在2019年4月4日提出申请的美国专利临时申请案,第62/829,377号的优先权权利,所述专利申请案的全部内容通过引用的方式并入本文中。
技术领域
2.揭露的实施例涉及用于测量及估计材料片(如相对大的玻璃片,特别是大且薄的玻璃片)的形状的方法及设备。
背景技术:
3.从较大原始玻璃片生产商业产品(如液晶显示器(lcd)、其他显示器玻璃等),涉及许多挑战。例如,重要的是要了解及控制用于形成大玻璃片的过程(例如,下拉熔融制程)及下游制程期间中玻璃片的表现(例如,当经由真空夹头将玻璃片固定在平面上、切割时等,玻璃片的表现)。此等挑战在美国专利号7,509,218及国际专利公开号wo2009/108302述及,其全部揭露内容通过引用方式并入本文。
4.为了更好地控制玻璃的成形及制造制程,获取有关本身就是柔性对象的大玻璃片的无重力形状的知识有很大的价值。确定大玻璃片的无重力形状已变得特别具有挑战性。随着玻璃制造制程的进步,原始玻璃片变得越来越大、越来越薄。实际上,在过去,典型的原始玻璃片可能约为1500毫米x1800毫米;然而,现有技术允许约为(如测量为2880毫米x3130毫米)9平方米量级的原始玻璃片,且在不久的将来,甚至可预期更大的玻璃片。此等玻璃片的厚度约为0.7毫米,因此对更薄的玻璃片的需求正在增加。
5.确定无重力形状的习知方法采用钉床(bon)技术,例如,在美国专利第7,509,218号及美国专利第9,031,813号中所详细描述,其全部揭露内容通过引用方式并入本文。bon技术涉及具有成阵列的(例如,约100个)高度可调式插销及力传感器组合的设备。可采用许多递归式算法的任何一种,响应于通过玻璃片施加到力传感器的测量力,来调整相应的高度可调式插销。当递归式算法造成高度可调式插销的相应高度通过力传感器致使测量的目标重量相对恒定时,则插销的相应高度会产生玻璃片的无重力形状。
6.bon技术的局限性(中的一者)是在于高度可调式插销及力传感器组合的阵列尺寸。实际上,随着原始玻璃片尺寸的增加,bon设备上的可用区域变得太小而无法容纳原始玻璃片。
技术实现要素:
7.根据所揭示的实施例的一个或更多个方面,采用了新技术以提供对柔性对象(如玻璃片)的形状更全面地了解,不仅涉及无重力形状,亦涉及固有形状及相关的热应变的特征。
8.本文之一或多个实施例可解决如何从测量无重力形状的bon技术期间取得的一或更多个测量值,来估计玻璃片的无重力形状及固有形状两者。
9.本文之一或多个实施例可解决如何从玻璃片的无重力形状、玻璃片的固有形状、及/或从玻璃片的热应变,来估计玻璃片(及从玻璃片切下的较小块玻璃片)的形状和翘曲特征。
10.本文之一或多个实施例可解决如何根据从太大以致无法适用在可用的bon设备上之大玻璃片,所切下的许多较小块玻璃片的相应固有形状及热应变,来估计此大玻璃片的无重力形状。
11.根据本文结合附图的描述,其他方面、特征、及优点对于本领域技术人员而言为显而易见的。
附图说明
12.为了说明的目的,在附图中示出了目前优选的形式,然而,应当理解,本文揭露及描述的实施例不限于所示的精确布置及手段。
13.图1a为放置在bon设备上的玻璃片的示意性示意图,特别是在初始递归中,bon设备的所有高度可调式插销均处于恒定的高度(平坦)的情况;
14.图1b为图1a放置在bon设备上的玻璃片的示意性示意图,特别是在算法的最终递归中,bon设备的所有高度可调式插销均指示玻璃片的无重力形状的情况;
15.图2a、图2b、图2c、及图2d图示拼接过程中的相应阶段,从而将一块较大玻璃片切成小块、获得到相应的无重力形状、并估计原始玻璃片的无重力形状的估计值。
16.图3a为递归(x轴)相对于bon设备中的插销高度(y轴)变化的代表性图表;
17.图3b为递归(x轴)相对于图3a的bon设备中的重量误差(y轴)的代表性图表;
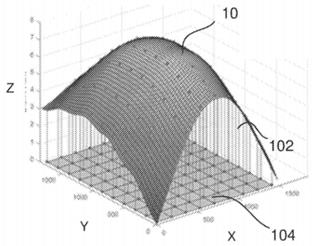
18.图4a为穹顶形的玻璃片的实际无重力形状的代表性阴影示意简图;
19.图4b为玻璃片的估计固有形状的代表性阴影示意简图;
20.图4c为玻璃片的估计热应变的代表性阴影示意简图;及
21.图4d为基于图4b的估计固有形状及图4c的估计热应变而计算出的图4a的玻璃片的无重力形状的代表性阴影示意简图。
具体实施方式
22.参阅附图,其中相似的数字表示相似的组件,图1a中显示的为放置在bon设备100上的玻璃片10的示意性示意图,特别是在初始递归中,bon设备100的所有高度可调式插销102皆处于恒定高度(即,平坦)的情况。如前文所述,每个高度可调式插销102与相应的力传感器104相关,它们以x
‑
y阵列(例如,9
×
11阵列)的方式排列。高度可调式插销102的相应高度是沿z方向测量(例如,通常以毫米为单位)。
23.图1b为图1a的bon设备100上的玻璃片10的示意性示意图,特别是在算法的最终递归中,bon设备100的所有高度可调式插销102均指示玻璃片10的无重力形状的情况。
24.bon过程涉及计算/估计若玻璃片10为完全平坦的(即,具有完全平坦的无重力形状)且若阵列的高度可调销102为完全平坦,玻璃片10会施加在力传感器104上的一组目标重量(例如,常数)。由于玻璃片10并非完全平坦,因此在bon设备100的所有高度可调式插销102均为常数(即,平坦)情况的初始递归(图1)处所测量的实际初始重量,与目标重量不匹配。因此,为了使力传感器104上的实际测量重量与目标重量匹配,bon设备100的高度可调
式插销102的相应高度不能为恒定的(且必须被改变)。
25.可采用许多递归式算法的任一种,基于在每个递归的力传感器上的测量重量,来计算高度可调式插销102的相应高度的变化。采用递归式算法来收敛在高度可调式插销102的相应高度的最终一组相应高度上,使得力传感器104上的实际测量重量与目标重量匹配。最终的一组相应高度反应了玻璃片10的(非平坦)无重力形状。所确定的无重力形状可通过将玻璃片10翻转到另一侧并再次执行bon制程来确认或测试。若两个bon制程均致使大致相同的无重力形状,则确认无重力形状。
26.如上所述,给定的bon设备100的局限性之一为高度可调式插销102及相关的力传感器104的阵列的有限尺寸。在图1a、图1b所示的实施例的情况下,9
×
11阵列的布置能测量约1500毫米
×
1800毫米量级的玻璃片。因此,不可能通过将整个玻璃片放置在图1a、图1b所示的bon设备100上直接测量更大玻璃片(例如,约2880毫米
×
3130毫米)的无重力形状。
27.参阅图2a、图2b、图2c、及图2d,将提出解决上述问题的习知尝试的论述。尝试解决方案的动力提供:(i)将较大的玻璃片切成较小块;(ii)测量bon设备100上每个较小片的无重力形状;(iii)将每个较小块的无重力形状以数学的方式拼接在一起,来估计(若未切割之)较大玻璃片的无重力形状。图2a、图2b、图2c、及图2d示意在所述拼接过程中的相应阶段,从而将(比bon设备100的可用面积更大的)玻璃片20切成较小块20a、20b、20c、20d。图2a图示使用bon设备100分别获取的每块的相应无重力形状。图2a图示相应无重力形状的俯视图(阴影),而图2b为较小块20a、20b、20c、20d的无重力形状的代表性透视图。图2a及图2b表明,每个较小块20a、20b、20c、20d的无重力形状通常为鞍形。
28.图2c图示了在小块20a、20b、20c、20d的每个相应无重力形状在小块20a、20b、20c、20d相应的边缘处匹配的情况,使用习知的拼接制程(或程序)之数学程序,较大玻璃片20的无重力形状的最终估计操作。尽管图2c中的结果令人感兴趣,但它与图2d中的玻璃片20的实际无重力形状不匹配,且通常为穹顶形。
29.已发现,对于一些类型的玻璃片,相对大的玻璃片20通常表现出穹顶形的无重力形状;然而,当切成小块时,每块通常皆具有鞍形的无重力形状。据信,此等特征系由于玻璃片20的制造过程中的熔融拉伸制程引起的。因此,当从(已熔融拉伸的)较大的玻璃片20切割出用于商业应用的小块玻璃时,除非对熔融拉伸制程进行改变,否则玻璃块趋向于呈现鞍形。值得注意的是,然而,从较大的玻璃片20的无重力(穹顶)形状来看,上述现象并不明显。
30.值得注意的是,图2c中估计的形状与玻璃片20的另一特征(即,固有形状)具有一些相似之处。固有形状是通过将玻璃片切割成多个较小块、测量此等小块的无重力形状、并(使用上述拼接程序)数学地将无重力形状拼接在一起而确定的形状。然而,已发现无需将玻璃片切成小块,即可估计玻璃片的固有形状。此发现部分基于图3a及图3b的代表性图表。
31.图3a为根据递归次数(沿x轴绘制)相对于bon设备中插销高度变化(沿y轴绘制的高度的绝对变化)的代表性图表。数据是在图1a及图1b所示的bon设备上、在测量为1500毫米x1850毫米x1.0毫米上的玻璃片10,执行上述递归式算法的结果。曲线300为根据递归次数,一或更多个高度可调式插销102的最大高度变化的绝对值的曲线图。曲线302为根据递归次数,可调式插销102中指定插销(例如,插销#1)的高度变化的绝对值的曲线图。曲线304为根据递归次数,高度可调式插销102中的另一指定插销(例如,插销#30)的高度变化的绝
对值的曲线图。
32.图3b为根据递归次数(沿x轴绘制)相对于bon设备中重量误差(沿y轴绘制的克数)(与结合图3a进行的实验相对应)的代表性曲线图。曲线306为根据递归次数,一或更多个力传感器104的最大重量误差的曲线图。曲线308为根据递归次数,一或更多个力传感器104的中值重量误差的曲线图。
33.着眼于图3a及图3b的圆圈部分,可查明一些有关bon技术采用的递归式算法的有趣信息。特别注意后述的情况,在如此情况中,基于每次递归时的测量重量来估计高度可调式插销的其次高度,并设法将任何重量误差归零。如在图3a及图3b中可见的,误差最初迅速减小(表示形状正在收敛),使得在递归100至200附近出现最小的误差。接着,误差增加,且随后在递归800附近再次减小至较早的误差大小。这证明了当高度可调式插销102通常为水平(平坦)时,高度可调式插销102的初始估计值会响应于重量分布。在此定位,玻璃片10(在平面内应力/应变)的嵌入热应变对高度可调式插销102上的法向力(重量)几乎没有影响。因而,(当高度可调式插销102通常为平坦时)高度可调式插销102的运动的初始估计值在固有形状(并非无重力形状)上收敛。一旦递归式算法估计出高度可调式插销102的其次高度充分地脱离平面(充分地远离平坦,例如,大于玻璃片的厚度),玻璃片10的嵌入应力对力传感器104上的法向力(重量)具有增加的效果。这导致递归式算法朝另一个方向上收敛的过程,即,最终成为玻璃片10的无重力形状。因而,可从玻璃片10的固有形状及嵌入热应变来确定无重力形状。
34.如前文所述及,当玻璃片10放置在相对平坦的高度可调式插销102的阵列上时,递归式算法测量重量分布、随后试图将插销102移定至重量将与目标重量匹配的位置。在递归为零时,初始重量测量值提供有关玻璃片10的固有形状的解决方案。在bon设备100中应用递归式算法,(在使用初始重量测量值计算并移动高度可调式插销102后)一旦玻璃片10移动脱离平面,高度可调式插销102上的重量将反映固有形状及反映平面内应力两者。因而,高度可调式插销102会收敛到玻璃片10的无重力形状,而非收敛到玻璃片10的固有形状。
35.根据本文之一或更多个实施例,此等方法及设备提供了:(i)当测量仪的多个力传感器全部处于恒定初始高度(平坦)时,响应于施加玻璃片10,获取在多个力传感器的每个力传感器上的相应初始重量测量值;及(ii)从相应初始重量测量值,估计玻璃片的固有形状。
36.一般而言,因为在最低限度只有一个初始重量测量值为必需的,测量仪不需包含高度可调式插销102(例如在bon设备中)。当然,测量仪可为bon设备,其中测量仪包含多个高度可调式插销102,每个高度可调式插销与如前所述的多个力传感器之一个力传感器104相关。
37.估计玻璃片10的固有形状的操作可经由以下步骤达成:(i)针对多个高度可调式插销102的每个高度可调式插销(及/或多个力传感器的每个力传感器104),从相应初始重量测量值计算远离恒定初始高度的相应其次高度,其中计算步骤基于用于移动可调式插销102的的递归式算法,来估计玻璃片10的无重力形状;及(ii)根据相应其次高度,估计玻璃片10的固有形状。
38.另一种从相应初始重量测量值,估计此玻璃片10的固有形状之操作的方式如下:
[0039][0040]
其中w0为第一固有形状,为玻璃片的弯曲刚度,h为玻璃片的厚度,ρ为玻璃片的密度,g为重力常数,e为玻璃片的杨氏模量,v为玻璃片的泊松比,及f
i
为相应初始重量测量值。
[0041]
可通过建模来验证固有形状。bon技术公司提供的信息为高度可调式插销上的测量重量及相对于平均水平平面的固有形状的预测高度。可在可商购的软件产品如,或类似软件中建模交互问题,当通过将插销(在模型中)移动至bon技术预测的位置而使具有正确尺寸、厚度、及玻璃属性(密度、杨氏模量、泊松比等)的水平平面片变形时,推算插销上的建模力。插销上的建模反应力应当与bon的测量资料一致,并且确实如此。
[0042]
在一些案例中,bon技术可能会使用针对与实验中的实际玻璃片不同的玻璃片厚度所推算出的矩阵。在如此案例下,ansys分析将显示反作用力的差异为[(厚度1)/(厚度2)]**2的比值。可因此校正固有形状,并且若知道厚度1及厚度2,无需ansys分析即可进行校正。
[0043]
亦可通过在插销位置应用(相对于平坦水平板件的)测量力误差并推算形状变化,通过采用comsol、ansys、或类似模型估计,更直接地推算固有形状。
[0044]
玻璃片与固有形状及重力形状特征相关之特征为嵌入热应变。当玻璃片的不同部分在不同的时间结晶化(或冻结)时,就会发生玻璃片的嵌入热应变,且此特征会影响玻璃片的形状。根据本文之一个或更多个实施例,此等方法及设备提供用于估计玻璃片的嵌入热应变(的方法)。透过范例说明的方式,玻璃片的嵌入热应变可通过以下步骤来估计:(i)当此玻璃片被压成平坦时,获取玻璃片中的测量应力;及(ii)根据测量应力及固有形状,估计嵌入热应变。
[0045]
与上述内容相关,可根据固有形状,表示从测量应力所获取的应力函数,如下所示:
[0046][0047]
其中为应力函数,ek
g
(w0)为固有形状w0的高斯曲线,及为基于嵌入热应变的项数,αt;及通过解出α获取热应变的估计值。在上述应力函数中,热应变对产出结果造成影响的唯一方法为经由二阶导数(亦称作“del
‑
squares alpha t”)。因此,为了估计热应变的作用,只需估计“del^2alpha t”即可。参阅图4c,使用了alpha
‑
t,此alpha
‑
t在垂直方向上为均匀的,且归因于从拉伸件向下流动的玻璃片的形成(即,拉伸件下方的变化比跨越拉伸件的变化小),仅在水平方向上有所变化。重要的是,(函数的)del^实际上为常数,许多其他函数亦将致使一个常数。
[0048]
可依据以下方法及装置对估计的热应变进行测试及改进:(a)将玻璃片的测量无重力形状与无重力形状的估计值比较,来获取玻璃片的估计嵌入热应变的精准度的指示;
(b)当比较结果指示估计嵌入热应变的精准度低于最小值时,修正估计嵌入热应变,并根据玻璃片的固有形状及修正嵌入热应变,重新估计玻璃片的无重力形状;及(c)重复步骤(a)及(b)直到比较结果指示估计第一嵌入热应变等于或高于最小值的精准度。
[0049]
参阅图4a、图4b、图4c、及图4d,本文所揭示之方法及设备可根据玻璃片10的固有形状及嵌入热应变,提供用于估计玻璃片10的无重力形状(的功能)。图4a为穹顶形的玻璃片10的实际无重力形状的代表性阴影示意简图。无需实际对玻璃片10的无重力形状进行测量,并使用前文论述的技术,可估计玻璃片10的固有形状(图4b),且以与玻璃片(图4c)的热应变的估计值有关的方式使用固有形状,来估计玻璃片10(图4d)的无重力形状,此形状亦为穹顶形。
[0050]
利用上文提出的发现,可获取有利的结果,包含在不切割较大玻璃片的情况下,用于估计较大玻璃片的较小块的相应局部无重力形状的方法及设备。特定而言,此等方法及设备提供了,根据玻璃片的固有形状,用于估计相应局部无重力形状(的功能)。例如,通过从固有形状减去多个局部平均平面中的相应局部平均平面,可估计多个局部无重力形状的每个局部无重力形状。
[0051]
使用上文论述的发现可获取有利的结果,特别是当(如上所述)无法通过bon设备直接测量大玻璃片20的无重力形状时。对此,单一的、相对大的玻璃片20被视为包含多个玻璃片(若切割成较小块),其中多个玻璃片包含第一施加的玻璃片,第二施加玻璃片等。
[0052]
本文的方法及设备提供了:(i)当测量仪的多个力传感器全部处于恒定初始高度(平坦)时,响应于第一施加玻璃片,获取在多个力传感器的每个力传感器上的相应第一初始重量测量值;及(ii)从相应第一初始重量测量值,估计第一玻璃片的一第一固有形状。
[0053]
此等方法及设备进一步提供了:(a)当多个力传感器全部设置成恒定初始高度时,响应于第二施加玻璃片,获取多个力传感器的每个力传感器上的相应第二初始重量测量值;(b)从相应第二初始重量测量值,估计第二玻璃片的第二固有形状;及(c)针对多个施加玻璃片的每个施加玻璃片重复步骤(a)及(b),来获取多个施加玻璃片的多个固有形状。
[0054]
此等方法及设备进一步提供了:(a)应用拼接程序来获取组合固有形状的估计值,组合固有形状包含在多个施加玻璃片的边缘处匹配之多个施加玻璃片的多个固有形状的每个固有形状;(b)估计组合玻璃片的嵌入热应变,其中使用拼接程序估计组合玻璃片,来组合在多个施加玻璃片的相应边缘处匹配之多个施加玻璃片;及(c)根据组合固有形状及嵌入热应变,估计组合玻璃片的无重力形状。
[0055]
此等方法及设备进一步提供了:通过获取组合玻璃片的嵌入热应变的估算值:(a)估计多个施加玻璃片的每个施加玻璃片的相应嵌入热应变;及(b)平均多个施加玻璃片的每个施加玻璃片的相应嵌入热应变,来获取组合玻璃片的嵌入热应变。
[0056]
额外地或备选地,此等方法及设备进一步提供了:通过以下步骤获取组合玻璃片的嵌入热应变的估算值:(a)从代表性玻璃片切下子区段,其中代表性玻璃片为组合玻璃片的特征的代表,且比多个施加玻璃片的任何一个施加玻璃片具有更大的正方形面积;(b)将代表性玻璃片的子区段施加到测量仪的多个力传感器上;(c)当多个力传感器全部设置成恒定初始高度时,响应于代表性玻璃片的子区段,获取在多个力传感器的每个力传感器上的相应初始重量测量值;(d)根据初始重量测量值,估计代表性玻璃片的子区段的固有形状;(e)当代表性玻璃片的子区段时,获取代表性玻璃片的子区段中的测量应力;及(f)根据
代表性玻璃片的子区段的测量应力及固有形状,估计组合玻璃片的嵌入热应变。
[0057]
虽然已于特定实施例中描述了本文的公开内容,但应当理解,此等实施例仅为本文实施例的原理及应用的说明。因此,应当理解,在不脱离本技术说明书的精神及范围的情况下,可对范例性实施方式进行多种修改,且可设计成其他布置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。