1.本发明总体上涉及一种用于控制车辆的车轮制动部的电液制动组件。
背景技术:
2.随着电动车辆和混合动力车辆在世界各地市场中不断激增,众所周知,通过在制动期间利用装置的马达
‑
发电机输出能力,可以获得电池寿命的显著延长。然而,被用于给电池再充电的发电机模式下的输入扭矩与踏板力/行程对车辆减速的驾驶员输入函数(function)不一致。为了实现该复杂的函数,车辆的液压制动部必须提供发电机制动扭矩与驾驶员要求的制动扭矩之间的差。
3.多年以来,工程界已经理解通常被称为再生制动混合的这种需求。用于实现这一点的一种最有效方式是使用“线控制动”技术。为了实现这一点,制动踏板实际上变成了操纵杆,所以该制动踏板必须被连接至行程和/或力传感器,以向系统ecu发送信号,该信号将此解释为驾驶员对期望车辆减速的意图。此外,必须通过适当的力
‑
行程关系来模拟制动踏板“感觉”,并且该制动踏板“感觉”还必须具有与将主缸直接应用于车轮制动部隔离的能力。
4.如首先提到的关于混合动力车辆和电动车辆在世界范围内的激增,还发生了另一种现象,即对于自主自动驾驶车辆的推动。结果,汽车工程师协会(sae)已制定了针对从0级到5级的自主之路范围(path to autonomy range)的指南。0级是无自动化。1级要求驾驶员辅助,例如自适应巡航控制。2级是部分自动化,例如凯迪拉克超级巡航
‑
驾驶员把手放在方向盘上。3级是有条件的自动化,例如奥迪交通堵塞驾驶系统。4级是高度自动化,例如具有一些非常特定的速度限制的自动驾驶车辆。5级是完全自动化,其中车辆可以与人类驾驶员在同一级别上操作。
5.具有主制动缸和歧管块的线控制动系统是众所周知的。对于这种类型的架构,单独的车轮压力控制通常由歧管块(也称为稳定性控制单元)处理。此特征提供了诸如但不限于abs、牵引力控制和稳定性控制等功能。此外,另一个重要功能是动态后制动。在制动行业中众所周知,当车辆减速时,重心会向前移动。这需要更大的前制动扭矩和更小的后制动扭矩,以防止后轮抱死。由于需要后轮来提供车辆稳定性,因此在所有制动条件下都不允许后轮抱死。
6.一体式(one
‑
box)线控制动系统正变得越来越普遍。这种一体式系统通常将主制动缸、歧管块、压力供应单元、踏板感觉模拟器、隔离阀等结合在单个集成组件中。一些现有的一体式线控制动系统结合有其他相关部件,例如储液部(fluid reservoir)。
技术实现要素:
7.本发明提供了一种电液制动组件,其包括液压控制单元(hcu)主体。所述hcu主体包括顶面、与所述顶面相反的底面、侧表面和前表面。所述侧表面和所述前表面垂直于彼此并且垂直于所述顶面、所述底面延伸。所述hcu主体限定了压力供应孔(bore)和主缸孔。所
述电液制动组件还包括储液部,所述储液部设置在所述hcu主体的所述顶面上;电子控制单元,所述电子控制单元联接至所述前表面;以及主活塞,所述主活塞可滑动地设置在所述主缸孔中。主活塞被配置成响应于制动踏板的按压而将制动液供应到车轮制动部。所述电液制动组件还包括压力供应单元,所述压力供应单元包括设置在所述压力供应孔内的压力供应活塞和具有马达轴的马达,所述马达轴被配置成使所述压力供应活塞线性地平移通过所述压力供应孔。所述主缸孔被限定在所述侧表面中;并且所述马达位于hcu主体的所述底面上。
8.本发明还提供了一种电液制动组件,其包括hcu主体。所述hcu主体包括顶面和与顶面相反的底面。所述hcu主体限定了主缸孔和压力供应孔。电液制动组件还包括:活塞,所述活塞可滑动地设置在所述主缸孔中并且被配置成响应于制动踏板的按压而将制动液供应到车轮制动部;以及压力供应单元。所述压力供应单元包括:压力供应活塞,所述压力供应活塞设置在所述压力供应孔内;马达,所述马达附接到hcu主体并且具有马达轴;以及致动器机构,所述致动器机构配置成响应于所述马达轴的旋转而使所述压力供应活塞线性平移通过所述压力供应孔。所述致动器机构包括:螺纹轴,所述螺纹轴被配置成由所述马达轴旋转;螺母,所述螺母联接至所述压力供应活塞;以及多个球形构件,所述多个球形构件位于所述螺母与所述螺纹轴之间,用于将所述螺纹轴的旋转转换为所述螺母的轴向移位。
9.本发明还提供了一种电液制动组件,其包括hcu主体。所述hcu主体包括顶面和与所述顶面相反的底面。所述hcu主体限定了主缸孔和平行于所述主缸孔延伸并与所述主缸孔间隔开的第一传感器孔。所述电液制动组件还包括主活塞,所述主活塞可滑动地设置在所述主缸孔中并且被配置成响应于制动踏板的按压而将制动液供应到车轮制动部。所述电液制动组件还包括踏板行程传感器,所述踏板行程传感器包括传感器杆,所述传感器杆可滑动地设置在所述第一传感器孔中并被连接以在所述第一传感器孔和所述主缸孔中的相应一个中与所述主活塞一起移动。所述踏板行程传感器还包括位置检测器,所述位置检测器被配置成检测所述传感器杆在所述第一传感器孔中的位置,并且由此确定所述主活塞的位置。
附图说明
10.本发明的其它优点将容易理解,因为通过参考下面结合附图考虑的详细描述,本发明的其它优点将变得更好理解,其中:
11.图1示出了车辆的示意性俯视图;
12.图2示出了用于电液制动组件的hcu主体的坯件的立体图;
13.图3示出了根据本发明的实施方式的电液制动组件的立体图;
14.图4示出了根据本发明的实施方式的电液制动组件的示意图;
15.图5示出了图4的示意图的放大部分;
16.图6示出了图3的电液制动组件的前横截面视图;
17.图7示出了图3的电液制动组件的侧视图;
18.图8示出了图3的电液制动组件的横截面透视图;
19.图9示出了图3的电液制动组件的hcu主体的侧视立体图,其中马达附接至其底面;
20.图10示出了包括马达连接器细节的图9的放大部分;
21.图11示出了根据本发明的实施方式的包括第一马达连接器和第二马达连接器的马达的局部放大视图;
22.图12示出了第二马达连接器的局部放大视图;
23.图13示出了第一马达连接器的局部放大视图;
24.图14示出了马达和第一马达连接器的局部视图;
25.图15示出了图3的电液制动组件的压力供应单元的分解图;
26.图16示出了图3的电液制动组件的压力供应单元的压力供应活塞的局部视图;
27.图17示出了图3的电液制动组件的突出部中的压力供应孔的横截面视图;
28.图18示出了图17的横截面视图的放大部分;
29.图19示出了图3的电液制动组件的踏板感觉蓄压部(accumulator)的放大横截面视图;
30.图20示出了图3的电液制动组件的hcu主体的侧视立体图,该hcu主体具有输入凸缘和踏板行程传感器;
31.图21示出了踏板行程连接器的局部放大视图;
32.图22示出了踏板行程传感器的细节和相对位置的立体图;
33.图23示出了hcu主体内的踏板行程传感器的放大的局部视图;
34.图24示出了hcu主体内的踏板行程传感器的横截面图;
35.图25示出了穿过图24中指示的平面a
‑
a的放大局部横截面视图;以及
36.图26示出了穿过图24中所示的平面b
‑
b的放大局部横截面视图。
具体实施方式
37.参照附图,其中,贯穿多个视图,相同的附图标记表示对应的部件,图1大致示出了具有根据本发明的一个实施方式构造的电液制动组件20的车辆10。车辆10可以是具有四个车轮制动部22、24、26、28(包括一对前轮制动部22、24和一对后轮制动部26、28)的机动车。电液制动组件20分别经由第一出口44和第二出口46连接到前轮制动部22、24。电液制动组件20分别经由第三出口48和第四出口49连接到后轮制动部26、28。
38.本公开的电液制动组件20不包括任何车载备用电源。在影响动力制动的故障的情况下,本公开的电液制动组件20可以依赖于车辆的驾驶员来手动地应用制动部。因此,本公开的电液制动组件20可以限于sae自主级别0至2。
39.图2示出了用于电液制动组件20的坯件12的立体图。坯件12可以由诸如铝的挤压金属形成。坯件12沿高度方向具有恒定横截面,这可通过挤出过程来提供。坯件12具有大致t形横截面,其中矩形实心部14对应于大致t形横截面的横杆,并且条形部16从矩形实心部14的较长的侧面向外延伸。
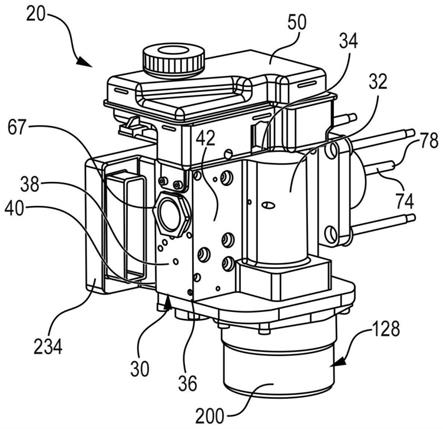
40.参照图3,电液制动组件20是一体式系统,该一体式系统包括液压控制单元(hcu)主体30,该液压控制单元(hcu)主体30由坯件12形成并且具有与包括顶面34、底面36、一对侧面38、前表面40和后表面42的矩形实心部1相对应的大致矩形部分。顶面34和底面36相反且彼此间隔开。侧表面38彼此相反且间隔开。侧表面38中的各个侧表面38将顶面34与底面36彼此连接,形成矩形形状。前表面40和后表面42均连接到顶面34和底面36以及侧表面38。前表面40和后表面42垂直于顶面34、底面36和侧表面38中的每一个。侧表面38均垂直于顶
面34和底面36中的每一个。hcu主体30还包括从后表面42向外延伸并从底面36向上延伸的突出部32。突出部32由坯件12的条形部16形成。电液制动组件20包括压力供应单元128,该压力供应单元128具有附接到hcu主体30的底面36并与突出部32对齐的马达200(例如dc或ac电动马达)。
41.hcu主体30还结合了来自歧管块(或车辆稳定性控制单元)的部件,这使得电液制动组件20更加紧凑。换言之,hcu主体30限定了分别与车轮制动部22、24、26、28流体连通的多个出口44、46、48、49,用于将制动液从hcu主体30供应到车辆的车轮制动部22、24、26、28。
42.储液部50设置在hcu主体30的顶面34上,用于容纳制动液并将制动液供应到电液制动组件20。如图9中所示,hcu主体30的顶面34限定了第一孔洞(hole)52、第二孔洞54和第三孔洞56,各个孔洞具有大致圆形的形状并且彼此间隔开。第一孔洞52、第二孔洞54和第三孔洞56与储液部50流体连通以允许储液部50与hcu主体30之间的流体传输。在一些实施方式中并且如图9所示,侧表面38之一限定了延伸到hcu主体30中的第一主缸(mc)孔57。第一mc孔57可具有柱状或大致柱状,但也可使用其他形状,例如两个或多个呈阶梯状配置的柱体。
43.现在参照图4和图5,电液制动组件20包括主制动缸51。第一mc孔57沿着hcu主体30平行于顶面34和底面36在相应的一个侧表面38与隔板59之间延伸。主制动缸51包括限定了第一流体端口61、第二流体端口63和第三流体端口65的第一mc孔57。第一流体端口61与隔板59间隔开,并且第二流体端口63和第三流体端口65均与隔板59相邻。具有柱形形状的第二mc孔60也形成在hcu主体30中。第二mc孔60与第一mc孔57成一直线(in
‑
line with)延伸,位于隔板59与侧表面38中和第一mc孔57相反的一个侧表面38之间,其中mc帽67封闭第二mc孔60。hcu主体30限定了第四流体端口88、第五流体端口90和第六流体端口92,每个流体端口都提供进入第二mc孔60的流体连通。第四流体端口88位于mc帽67附近。第五流体端口90位于mc帽67与隔板59之间,并且第六流体端口92位于第四流体端口88与第五流体端口90之间。
44.主活塞66和辅活塞68以彼此串联(tandem)的关系设置。主活塞66可滑动地设置在第一mc孔57中,而辅活塞68可滑动地设置在第二mc孔60中。主活塞66限定了在主活塞66与隔板59之间延伸的主腔室58。辅活塞68具有大致h形的横截面并且将第二mc孔60分成第一隔室62和第二隔室64。第一隔室62在辅活塞68与hcu主体30的侧表面38之间延伸。第二隔室64在辅活塞68与隔板59之间延伸。主活塞66具有大致h形的横截面。主活塞66限定了第一孔口70,用于调节制动液从第一流体端口61流入主腔室58的流量,仅当主活塞66处于缩回位置时才允许流体流过其中。辅活塞68限定了用于调节制动液从第六流体端口92流入第一隔室62的第二孔隙(aperture)71,仅当辅活塞68处于缩回位置时才允许流体流过其中。
45.辅活塞68包括轴72,轴72延伸穿过隔板59中的孔洞73,并进入主腔室58以与主活塞66接合。在另一种布置中,代替将两个活塞66、68以彼此串联的关系设置。替代地,本公开的多个方面可以与单活塞主制动缸一起使用。
46.推杆74在第一端76与第二端78之间延伸,用于响应于制动踏板80的按压而移动活塞66、68。推杆74的第一端76连接到主活塞66,并且第二端78连接到制动踏板80以允许用户移动活塞66、68。
47.踏板行程传感器82连接到踏板80,用于感测和确定由施加到制动踏板80的压力引
起的主活塞66的线性位置。液位传感器fls监测储液部50中的液位。液位传感器fls可以包括例如指示储液部50中的低液位的浮子开关。
48.第一弹簧84位于主腔室58中,在隔板59与主活塞66之间延伸,用于将主活塞66远离隔板偏压并且偏压到缩回位置。第二弹簧86位于第一隔室62中,在mc盖67与辅活塞68之间延伸,用于将辅活塞68远离mc盖67偏压并且偏压至缩回位置。
49.现在参照图4,踏板感觉模拟器(pfe)94设置成与主制动缸51的第一流体端口61流体连接,用于向主活塞66提供阻力。踏板感觉模拟器94包括用于对来自驾驶员的脚的压力提供规定的阻力的踏板感觉蓄压部96、踏板感觉管线98、踏板感觉止回阀100和pfe隔离阀102。踏板感觉管线98在踏板感觉蓄压部96与第一流体端口61之间延伸,将踏板感觉模拟器94与主制动缸51连接以建立阻力。踏板感觉止回阀100被配置成允许流体从踏板感觉蓄压部96的顶侧流到主制动缸51的主腔室58,同时防止沿相反方向的流动。pfe隔离阀102定位成与踏板感觉止回阀100成平行关系。pfe压力传感器104被配置成监测踏板感觉管线98中的流体压力。
50.现在参照图19,hcu主体30限定了pfe孔106和用于容纳踏板感觉蓄压部96的凹部108。凹部108与pfe孔106连通。更具体地,pfe孔106的最里面部分限定了凹部108,其被示为偏离中心并且具有比pfe孔106更小的直径。根据本发明的实施方式,踏板感觉止回阀100位于凹部108中并且踏板感觉蓄压部96至少部分地设置在pfe孔106中。保持部110连接到hcu主体30以将踏板感觉蓄压部96和踏板感觉单向阀100固定在pfe孔106中。
51.根据本发明的实施方式,踏板感觉蓄压部96是有效地集成到hcu主体30中的两级装置。踏板感觉蓄压部96包括主活塞112,其具有大致u形横截面,可滑动地设置在pfe孔106中,用于将pfe孔106中的制动液推到主制动缸51。密封环114围绕主活塞112延伸以提供抵靠主活塞112的流体密封。主活塞112限定了朝向保持部110延伸并与hcu主体30的pfe孔106连通的腔116。橡胶弹簧118设置在腔116中,与主活塞112呈抵接关系。弹簧座120可滑动地设置在腔116中以将橡胶弹簧118夹在弹簧座120与主活塞112之间。第一级弹簧122位于弹簧座120和保持部110之间以将橡胶弹簧118和弹簧座120偏压成抵靠主活塞112。
52.返回参照图4和图6,hcu主体30限定了压力供应孔125,该压力供应孔125具有大致柱形形状,沿竖直轴线a延伸穿过底面36并位于突出部32内。hcu主体30限定了与压力供应孔125流体连通的入口端口126和出口端口127。入口端口126与压力供应孔125的终端间隔开并且经由第二孔洞54与储液部50连通以用于将流体从储液部50提供到压力供应孔125中。出口端口127位于压力供应孔125的终端附近,用于将流体从压力供应孔125输送出来并进入psu流体通道130。psu压力传感器105被配置成监测psu流体通道130中的流体压力。
53.压力供应单元128包括位于hcu主体30的底面36上并附接到其上的马达200,覆盖压力供应孔125。压力供应单元128与储液部50流体连通并被配置成将制动液从储液部50供应到车轮制动部22、24、26、28,用于使车辆10减速。
54.电液制动组件20包括电子控制单元(ecu)234,该电子控制单元(ecu)234电连接到各种传感器fls、82、104、105、140、电磁阀102、132、136、148、166、166'、168、168'、170、170'、172、172'和马达200,用于协调电液制动组件20的操作。
55.电液制动组件20包括psu补充阀132和psu止回阀134,该psu补充阀132和psu止回阀134彼此串联设置,位于psu流体通道130与储液部50之间。psu补充阀132可以是常开型
阀,该常开型阀被配置成在电力损失的情况下允许通过其的流体连通。psu止回阀134允许流体从储液部50流到psu流体通道130,同时防止流体沿相反方向流动。马达位置传感器140检测马达200的旋转位置,允许ecu 234确定压力供应活塞190的线性位置。有时在abs停止期间,压力供应单元128可能需要补充其压力供应孔125中的流体,因为在车轮释放时,释放阀168'、172'、166'和170'将流体引导回储液部50。在这个意义上,压力供应单元128用作液压泵。通过缩回压力供应活塞190,流体被吸入通过止回阀134和psu补充阀132,重新填充psu孔125。主制动缸51还具有第一隔室62,该第一隔室62必须独立于压力供应单元孔125进行补充。为了填充第一隔室62,psu补充阀132关闭,其他阀被适当地排序,并且压力供应单元128的压力供应活塞190朝向马达200移位以使得第二隔室64中的压降引起辅活塞68缩回,从而通过止回阀103吸入流体,能够在第一隔室62中进行补充。
56.第一供应流体通道146将制动液供应到左前轮制动部22和右后轮制动部28。第二供应流体通道150将制动液供应到右前轮制动部24和左后轮制动部26。mc隔离阀148选择性地控制主制动缸51的主腔室58与第一供应流体通道146之间的流体连通。mc隔离阀148可以是常开型阀,其被配置成在电力损失的情况下允许流体通过其连通。psu隔离阀136选择性地控制psu流体通道130和第一供应流体通道146之间的流体连通。psu隔离阀136可以是常闭型阀,用于在电力损失的情况下关闭来自压力供应单元128的流体流。psu阀136允许电液制动组件20响应于psu 128的故障流体地分离psu 128。
57.储液部测试阀(reservoir test valve)154和流量止回阀156均位于储液部50的第三孔洞56与主制动缸51的第一流体端口61之间,并且成彼此平行的关系。贮存部测试阀154是常开阀。流量止回阀156允许流体从储液部50流入主制动缸51的第一流体端口61,同时阻止流体沿相反方向流动。
58.hcu主体30还包括设置在其中的稳定性控制单元,用于向车辆的车轮制动部22、24、26、28供应制动液。出口44、46、48、49包括彼此间隔开的第一出口44、第二出口46、第三出口48和第四出口49。第一出口44与左前轮制动部22流体连通。第二出口46与右前轮制动部24流体连通。第三出口48与左后轮制动部26流体连通。第四出口与右后轮制动部28流体连通。第一回流管路152允许流体经由第三孔洞56从左前轮制动部22和右后轮制动部28返回到储液部50。第二回流管线158允许流体经由第一孔洞52从右前轮制动部24和左后轮制动部26返回到储液部50。
59.电液制动组件20包括八个稳定阀166、166'、168、168'、170、170'、172、172',用于控制制动液的流动并改变车轮制动部22、24、26、28处的制动液压力。稳定阀166、166'、168、168'、170、170'、172、172'可以统称为防抱死制动系统(abs)阀,用于它们在这种abs中的使用。然而,稳定阀166、166'、168、168'、170、170'、172、172'可用于其他功能,例如用于牵引力控制和/或用于扭矩矢量。左前应用阀166选择性地控制从第一供应流体通道146到左前轮制动部22的流体流动。左前释放阀166'选择性地控制从左前轮制动部22经由第一回流管线152到储液部50的流体流动。右前应用阀168选择性地控制从第二供应流体通道150到右前轮制动部24的流体流动。右前释放阀168'选择性地控制来自右前轮制动部24经由第二回流管线158到储液部50的流体流动。右后应用阀170选择性地控制从第一供应流体通道146到右后轮制动部28的流体流动。右后释放阀170'选择性地控制流体从右后轮制动部28经由第一回流管线152到储液部50的流体流动。左后应用阀172选择性地控制流体从第二供应流
体通道150到左后轮制动部26的流体流动。左后释放阀172'选择性地控制流体从右前轮制动部26经由第二回流管线158到储液部50的流体流动。
60.参照图4、图5、图6、图7、图8、图9、图10、图11和图12,压力供应单元(psu)128包括可滑动地设置在压力供应孔125中的压力供应活塞190,用于将制动液供应到psu流体通道130中。多个o形环192位于压力供应孔125中,围绕压力供应活塞190环形地延伸并与压力供应活塞190密封接合。致动器机构194连接到压力供应活塞190,用于沿压力供应孔125移动压力供应活塞190。
61.如图8和图15最佳所示,致动器机构194包括螺纹轴196和螺母198。螺纹轴196沿压力供应孔125延伸,与压力供应活塞190径向间隔开。螺母198围绕连接到压力供应活塞190的螺纹轴196延伸。马达200连接到螺纹轴196以旋转螺纹轴196。多个球形构件201位于螺母198与螺纹轴196之间,用于将螺纹轴196的旋转转换为螺母198的轴向移位。因此,螺母的轴向移位引起压力供应活塞190通过压力供应孔125的轴向移动。螺母198可以附接到压力供应活塞190,以一起移动通过压力供应孔125。例如,螺母198可以通过螺纹连接、紧固件和/或使用粘合剂或焊接附接到压力供应活塞190。在一些实施方式中,螺母198可以与压力供应活塞190一体地形成。
62.如图15所示,彼此周向间隔开的多个防旋转构件202从压力供应活塞190径向向外延伸。行星齿轮组206、208、210将马达轴212联接至螺纹轴196以比马达轴212的旋转速度更慢的旋转速度旋转螺纹轴196。因此,行星齿轮组206、208、210也引起施加到螺纹轴196的扭矩的相应增加。行星齿轮组206、208、210包括中心齿轮206、多个行星齿轮208和环形齿轮210。中心齿轮206联接至马达200的马达轴212并随马达轴212一起旋转。行星齿轮208围绕中心齿轮206设置,并且与中心齿轮206啮合接合,以围绕中心齿轮206进行旋转运动。环形齿轮210围绕行星齿轮208延伸,连接到压力供应孔125的内表面以允许行星齿轮208围绕中心齿轮206旋转。环形齿轮210可由聚合物材料制成,例如塑料,但也可使用其他类型的材料。环形齿轮210包括三个耳部211,各个耳部211具有从环形齿轮210的周缘以规则的角度间隔径向向外延伸的拱形形状。耳部211可以接合hcu主体30中的相应结构以防止环形齿轮210旋转。在一些实施方式中,耳部211可以装配在环形齿轮保持部213中的相应凹部内。环形齿轮保持部213是箍形部件,其可以由金属制成,并且可以压配合到压力供应孔125中并且围绕环形齿轮210的外周设置。环形齿轮210的耳部211与环形齿轮保持部213中的相应凹部之间的界面防止环形齿轮210旋转。
63.具有大致圆形形状的行星架214设置在压力供应孔125中并联接至行星齿轮组206、208、210和螺纹轴196。行星架214限定了沿着该行星架214的轴线的开口216,用于容纳螺纹轴196的端部。行星架214还限定了与开口216径向间隔开的多个销孔218。销220延伸穿过各个销孔218并穿过相应的行星齿轮208,从而将行星架214联接到行星齿轮208并允许行星架214和螺纹轴196与行星齿轮208一起旋转。外环222联接至压力供应孔125的内表面,与行星架214径向间隔开。多个滚珠轴承224位于外环222与行星架214之间,用于允许行星架214在压力供应孔125中旋转。或者,压力供应单元的所有部件都容纳在压力供应孔125中以产生从马达轴212的旋转到压力供应活塞190通过压力供应孔125的线性平移的高效能量转换。
64.现在参考图16,压力供应孔125的内表面限定了多个槽204,该多个槽204定位成围
绕压力供应孔125的内表面并且沿周向彼此间隔开。各个槽204容纳防旋转构件202中的对应一个以防止压力供应活塞190在压力供应孔125中旋转。
65.压力供应孔125和形成在hcu主体30中的槽204的设计细节在图16、图17和图18中示出。根据本公开的一方面,可以首先在hcu主体30中钻出对应于各个槽204的孔洞。在钻出对应于槽204的孔洞之后,可以在hcu主体30中形成更大的孔洞,与对应于每个槽204的孔洞相交,从而形成压力供应孔125。与否则可能会使用的其他技术(例如拉削)相比,形成对应于槽204的孔洞和压力供应孔125的主圆孔洞可能是相对低成本的操作。根据本公开的另一方面,对应于槽204的孔洞可以以从形成压力供应孔125的圆孔洞的周壁稍微径向向内的点为中心(即,形成压力供应孔125的较大圆孔洞的半径)。这种定位可以消除对拐角断裂的需要并且仍然允许接近最大保持力。在一些实施方式中,对应于槽204的孔洞的中心线可以位于从圆形孔的周壁径向向内0.1mm和0.4mm之间,从而形成压力供应孔125。在一些实施方式中并且如图18所示,对应于槽204的孔洞的中心线与形成压力供应孔125的圆孔洞的周壁之间的距离可以是0.125mm。图中所示的示例实施方式包括槽204中的四个槽204,然而,可以使用不同数量的槽204。
66.如图14所示,马达200包括第一电连接器226和一组第二电连接器228。第一电连接器226包括连接到位于马达200中的马达位置传感器140的多个端子。第二电连接器228与马达200的绕组相连。图中显示了三个第二电连接器228,对应于马达200是具有三组绕组的三相装置。然而,马达200可具有不同数量的第二电连接器228。例如,单相电动马达可仅包括两个第二电连接器228。第二电连接器228的电导体可大于第一电连接器226的对应导体,用于传输更高量的电流以操作马达200。第一电连接器226和第二电连接器228中的每一个以与马达轴212平行的关系从马达200向外延伸。
67.图11示出了连接到第一电连接器226的第一直角连接器230。图11和图12示出了连接到第二电连接器228的第二直角连接器232。每个直角连接器可以位于hcu主体30内,如图9所示,从前表面40突出,用于在ecu 234与马达200和马达位置传感器140中的相应一个之间提供电接口。图13示出了第一电连接器226,该第一电连接器226通过插头和销互连来连接到第一直角连接器230的六个导体。图12示出了使用叉
‑
铲型(fork
‑
and
‑
spade)互连来连接到马达200的第二电连接器228的第二直角连接器232。
68.图10示出了第一电联接部236、238,该第一电联接部236、238包括在第一直角连接器230上的多个焊盘236,以及ecu 234的对应第一弹簧偏压销238。第一弹簧偏压销238也可以称为弹簧针(pogo
‑
pin)。ecu 234包括第一弹簧偏压销238,该第一弹簧偏压销238被配置成接触焊盘236中的每一个,尽管图10中为了简单起见仅示出了第一弹簧偏压销238中的一个。图10还示出了第二电联接部240、242,包括从hcu主体30的前表面40向外突出的第二直角连接器232的三个扁平端子240。ecu 234包括叉形连接器242,该叉形连接器242被配置成接触扁平端子240中的相应的扁平端子240。第二电联接部240、242的叉
‑
铲型互连仅仅是示例,并且可以使用其他电互连。通过将ecu 234附接到hcu主体的前表面40,第一电联接部236、238和第二电联接部240、242中的每一个在单步操作中提供了在马达200与ecu 234之间的电联接。
69.图20至图26示出了电液制动组件20,该电液制动组件20包括用于测量主活塞66的线性位置的踏板行程传感器82和与其连接的制动踏板80。图20示出了hcu主体30的侧视立
体图,其中输入凸缘300附接到其侧表面38,用于安装hcu主体30。主制动缸51的主活塞66延伸穿过输入凸缘300以由制动踏板80(图20中未示出)通过推杆74压入hcu主体30中。图20还示出了限定了第一传感器孔302的hcu主体30,该第一传感器孔302平行于主缸孔57延伸并与其间隔开。
70.踏板行程传感器82包括传感器杆304,该传感器杆304可滑动地设置在第一传感器孔302中并且被连接以与主活塞66一起在第一传感器孔302和主缸孔57中的相应的一个中移动。换句话说,传感器杆304和主活塞66中的每一个都连接在一起,因此它们各自在第一传感器孔302和主缸孔57中的相应一个中一起移动相同的轴向位移。在一些实施方式中,如图20所示,保持夹306将传感器杆304连接到主活塞66。保持夹306设置在hcu主体30的外部,在传感器杆304和主活塞66中的每一个的轴向端处或附近。
71.hcu主体30还限定了第二传感器孔310,该第二传感器孔310垂直于并邻近于第一传感器孔302延伸并且与前表面40相交。踏板行程传感器82还包括位置检测器312,该位置检测器312至少部分地设置在第二传感器孔310内并且被配置成检测传感器杆304在第一传感器孔302中的位置,从而确定主活塞66的位置。
72.图20和图21示出了位置检测器312,该位置检测器312包括具有多个接触片(patch)316的第三直角连接器314,用于与ecu 234(在这些图20至图21中未示出)的相应第二弹簧偏压销318电接触。第三直角连接器314可以与第一直角连接器230相似或相同地起作用,以通过将ecu 234附接到hcu主体30的前表面40来在单步操作中提供踏板行程传感器82与ecu 234之间的电联接。
73.在一些实施方式中,传感器杆304沿其长度具有变化的磁通量。如图22至图23所示,位置检测器312包括磁性拾取部320,该磁性拾取部320设置为邻近第一传感器孔302并且被配置成基于传感器杆304的变化的磁通量来检测传感器杆304的位置。传感器杆304的磁通量例如可以定义具有诸如波形模式或脉冲模式的模式的磁通量,该模式沿着传感器杆304的长度变化,并且由位置检测器312的磁性拾取部320检测。位置检测器312可以使用另一种传感器类型,例如可以是磁的、光学的、机械的或机电的,以检测传感器杆304的线性位置。例如,位置检测器312可以包括编码器、解析器等,以确定传感器杆304的线性位置。位置检测器312还包括保持磁性拾取部320的印刷电路板322,和用于经由第三直角连接器314向ecu 234提供信号的相关电路。
74.如图23所示,磁性拾取部320可以位于第二传感器孔310内,邻近第一传感器孔302并与第一传感器孔302间隔开(即,少量hcu主体30在其间延伸)。因此,可以防止进入第一传感器孔302的任何流体接触位置检测器312。
75.如图24所示,帽330附接至输入凸缘300,覆盖传感器杆304、主活塞66和保持夹306。帽330限定了用于容纳推杆74(图24中未示出)的开口332。图25至图26分别示出了通过平面a
‑
a和平面b
‑
b的横截面细节,如图24所示。在一些实施方式中,并且如图25所示,保持夹306与传感器杆304之间存在松配合。该界面可以防止传感器杆304旋转,同时还提供间隙以防止绑定。
76.显然,根据上述教导,对本发明的许多修改和变型是可能的,并且这些修改和变型可以以与具体描述不同的方式来实施,同时在所附权利要求的范围内。这些在先陈述应该被理解为涵盖本发明新颖性实践其实用性的任何组合。前面的描述并不旨在穷举或限制本
公开。特定实施方式的各个元件或特征通常不限于该特定实施方式,而是在适用的情况下是可互换的并且可以在所选实施方式中使用,即使没有具体示出或描述。同样也可以以许多方式变化。此类变化不应被视为脱离本公开,并且所有此类修改旨在被包括在本公开的范围内。
77.本专利申请要求于2020年11月23日提交的美国临时专利申请no.63/117,438的权益,其内容通过引用整体并入本文。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。